
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель, функции и задачи САУ
- 3. Конструктивные и технологические особенности кислородного турбокомпрессора
- 4. Обзор системы автоматического управления турбокомпрессором
- 4.1 Формализация объекта управления
- 4.2 Анализ структурной схемы САУ турбокомпрессора
- Выводы
- Список источников
Введение
От эффективности и надежности работы компрессорной установки зависят КПД и долговечность комплекса в целом.
В основном, центробежные компрессорные установки являются неотъемлемой составной частью большинства промышленных и общественных комплексов, их используют на компрессорных станциях металлургических заводов, машиностроительных предприятий, в горнодобывающей, нефтеперерабатывающей промышленности, для транспортировки больших объемов газа.
Турбокомпрессоры являются достаточно долговечными, надёжными и экологически безопасными установками, отвечающие современным технологическим требованиям и установленным стандартам.
Регулирование давления в кислородном компрессоре является приоритетной задачей при создании систем автоматического управления турбокомпрессором, так как степень компримирования кислорода и подача его на заводские объекты и установки полностью зависит от производительности компрессора, которую при создании эффективной САУ можно регулировать в соответствии с требованиями пользователя к разработанной системе.
Главным вопросом при автоматизации компрессора – является обеспечение бесперебойной подачи сжатого кислорода в заводскую сеть, необходимого качества и количества.
1. Актуальность темы
Актуальность данной темы определяется, во–первых, тем, что обеспечение сжатым газом оборудования, установок и печей на металлургическом производстве, является первостепенно важной задачей. Во–вторых, в современных условиях компрессорные установки в целом определяют эффективность работы кислородно-компрессорного цеха на предприятии. Проблематика создания эффективной и экономически выгодной системы автоматического управления компрессорной установкой на металлургическом предприятии до сих пор остается актуальной задачей.
2. Конструктивные и технологические особенности кислородного турбокомпрессора
Кислородные турбокомпрессоры – надежные машины и значительно превосходят по своим эксплуатационным качествам поршневые кислородные компрессоры. Другим важным их преимуществом является то, что кислород, сжатый в турбокомпрессорах, не загрязнен водой или эмульсией.
Компрессоры подразделяют по количеству ступеней сжатия на:
– одноступенчатые компрессоры;
– двухступенчатые компрессоры;
– многоступенчатые компрессоры.
В качестве рассматриваемого объекта выбран многоступенчатый центробежный турбокомпрессор КТК 12,5/16.
Компрессор предназначен для компремирования и подачи газообразного кислорода в заводскую сеть потребителей. Рабочим агентом является кислород концентрацией до 99,8 % по объему с относительной влажностью при условиях всасывания до 100 % [2].
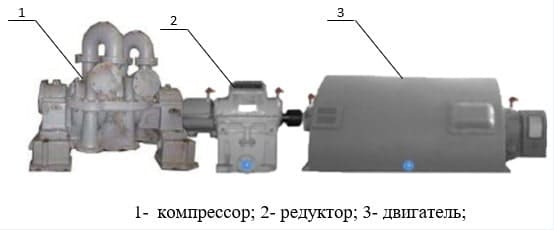
Рисунок 2.1 – Внешний вид кислородного турбокомпрессора
Кислородный турбокомпрессор (рис. 1.2) состоит из следующих основных узлов: компрессора (1), корпуса, ротора (2), синхронного двигателя (3), подшипников и холодильников. Ротор компрессора состоит из стального вала, на который посажены рабочие колёса и разгрузочный поршень (думмис).
На (рис. 1.3) изображена обобщенная схема многоступенчатого центробежного турбокомпрессора. Обеспечить наибольшую степень компримирования кислорода, позволит применение многоступенчатого турбокомпрессора, который преобладает над применением одноступенчатых компрессоров, за счёт достижения высоких показателей давления.

Рисунок 2.2 – Обобщенная схема многоступенчатого компрессора
(анимация: 6 кадров, 145 килобайт)
Рассматривая обобщенную структуру компрессора видно, что конструктивно он состоит из: рабочего вала (1), всасывающего патрубка (2), выпускного патрубка (3), корпуса компрессора (4), рабочих колёс (8).
Компрессор имеет 8 ступеней сжатия, распределенных следующим образом:
– первый корпус (5) – 2 ступени;
– второй корпус (6) – 4 ступени;
– третий корпус (7) – 2 ступени.
Процесс сжатия кислорода в турбокомпрессорной установке, является политропным, т.е. в процессе компримирования газа происходит его нагрев, за счёт перехода кислорода в тепло энергию, затрачиваемую на преодоление сил трения.
3. Цель, функции и задачи САУ
Цель создаваемой системы – улучшение системы обеспечения бесперебойной подачи сжатого кислорода в заводские объекты и установки, путем создания автоматической системы управления давления для турбокомпрессора.
Для реализации поставленной цели необходимо:
– обладать информацией о значении давления после байпаса;
– обладать информацией о значении давления на выходе компрессора;
– реализовать алгоритмы расчета управляющего сигнала на основании всей имеющейся информации;
– реализовать связь полученной системы с диспетчерским пунктом.
Основная задача регулирования режима работы компрессорных агрегатов и станций состоит в поддержании постоянного заданного давления сжатого воздуха в пневмосети путем изменения про-изводительности компрессоров соответственно потреблению сжатого кислорода.
Вследствие этого, очевидно, суммарные энергетические затраты на автоматизированных кислородных станциях будут ниже, чем на станциях, где автоматика отсутствует.
Основные функции, которые должна выполнять система автоматического управления:
1) функции управления:
– нормализация давления кислорода на выходе турбокомпрессора;
2) функции информационные:
– сбор информации с датчиков и передача к управляющему контроллеру;
– сигнализация о аварийных ситуациях;
– связь управляющего контроллера с диспетчерским пунктом для получения и передачи данных.
Основной функцией применения частотного регулирования числа оборотов двигателя, является поддержание значения давления на выходе компрессора, путём автоматического регулирования расхода путем снижения или повышения числа оборотов двигателя, что обеспечивает необходимое значение сжатия кислорода в заводскую сеть [5].
Применение частотного привода обеспечит:
– поддержание заданного уровня давления;
– плавное изменение расхода кислорода;
– отказ от добавочной запорно-регулирующей арматуры;
– высокую производительность турбокомпрессора в режиме минимальной нагрузки;
– увеличит значение наработки на отказ в турбокомпрессорной установке;
– снижение вероятности возникновения помпажа при работе компрессора;
– уменьшение числа пусковых токов в электрической сети турбокомпрессора.
4. Обзор системы автоматического управления турбокомпрессором
Разработка системы автоматического управления турбокомпрессором в свою очередь предполагает контроль и управление параметров, влияющими на режимы работы объекта управления.
Для обеспечения эффективного управления компрессорной установки необходимо:
– измерять давление на выходе компрессора;
– измерять потребляемый расход кислорода;
– регулировать частоту вращения двигателя с помощью применения высоковольтного преобразователя частоты (ПЧ), для поддержания заданного значения давления на выходе компрессора.
4.1 Формализация объекта управления
Для обеспечения нормального режима работы и своевременного обнаружения нарушений в работе кислородного турбокомпрессора необходим постоянный контроль ряда параметров, анализ ситуации, выдача управляющих воздействий и аварийных сигналов при отклонении контролируемых параметров.
Вследствие вышесказанного следует выделить контроль и регулирование давления и расхода, которые являются ключевыми параметрами для полноценной работы компрессора.
Для успешного регулирования давления на выходе компрессора требуется высокое быстродействие системы автоматического управления и малая инерционность системы [9].

Рисунок 4.1 – Кислородный турбокомпрессор как объект управления
Исходя из вышеизложенного, определены регулируемые переменные, управляющие и возмущающие воздействия (рис. 1) [1].
Для успешного регулирования давления на выходе компрессора требуется высокое быстродействие системы автоматического управления (САУТК) и малая инерционность системы. Следует также учитывать явление помпажа, которое необходимо компенсировать для предотвращения ухудшения выходных характеристик объекта или выведения его из рабочего состояния.
Регулируемым параметром является:
– давление кислорода на выходе компрессора Pк, мПа.
Управляющим параметром является:
– производительность турбокомпрессора Fтк, м3/с.
Возмущающим параметром является:
– потребляемый расход Fк.
4.2 Анализ структурной схемы САУ турбокомпрессора
Принцип построения САУ по отклонению (принцип обратной связи) с помощью одного основного контура управления для данного объекта – кислородного турбокомпрессора не позволяет получить требуемую эффективность управления, так как останется неучтенным основное возмущение по потребляемому расходу кислорода, без которого будет невозможно точно регулировать постоянно изменяющееся значение давления на выходе компрессора за счёт изменения производительности компрессора. В свою очередь применение комбинированного принципа управления предусматривает одно временное использование управления по отклонению и управления по возмущению, объединяя преимущества двух принципов управления в одной системе [3].
Комбинированная САУ кислородным турбокомпрессором представляет собой совокупность объекта управления, регулятора и датчика, а регулирование осуществляется по управляемой переменной и по основному возмущающему воздействию (рис. 2).
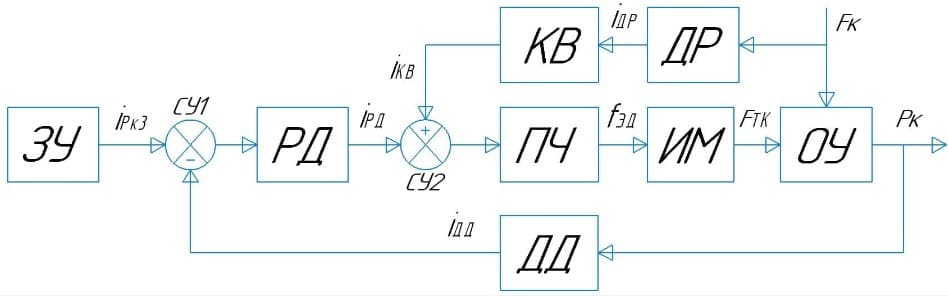
Рисунок 4.2 – Комбинированный принцип управления
Функциональные элементы системы: ОУ – объект управления (кислородный турбокомпрессор); ЗУ – задающее устройство; ДД – датчик давления; ДР – датчик расхода; СУ1, СУ2
– сравнивающие устройства; РД – регулятор давления; ПЧ – высоковольтный частотный преобразователь; ИМ – исполнительный механизм (двигатель турбокомпрессора).
Принцип функционирования САУ кислородным турбокомпрессором с применением комбинированного принципа управления, заключается в следующем: производится измерение давления датчиком (ДД), управляемой переменной PК, токовый сигнал IДД, с помощью сравнивающего устройства (СУ1) сравнивается с токовым задающим сигналом IРК3. Элемент сравнения формирует сигнал рассогласования, который поступает на регулятор (РД), где формируется управляющее воздействие IРД с помощью регулятора давления (РД). С помощью дат- чика расхода (ДР), измеряется основное возмущение – потребляемый расход (FК) и сигнал поступает на компенсатор возмущения (КВ), который формирует сигнал ошибки (IКВ) изменяющегося возмущения и поступает на сравнивающее устройство (СУ2), которое сравнивает сигнал с IРД и с учётом изменяющегося возмущения, формирует общее управляющее воздействие IПЧ для преобразователя частоты (ПЧ), тот в свою очередь формирует и выдает управляющее воздействие в виде требуемого изменения частоты питающего напряжения (fЭД) на исполнительный механизм (ИМ), для требуемого изменения частоты вращения его вала, с помощью которого производится регулирование производительности всего объекта управления (ОУ), изменение производительности турбокомпрессора приводит к соответствующему изменению давления кислорода PК на выходе компрессорной установки.
На основе анализа особенностей кислородного турбокомпрессора как объекта автоматического управления и предложенной выше концепции построения САУ (рис.2), разработана структурная схема САУ давлением кислорода кислородного турбокомпрессора, которая приведена на рис.3 [7].
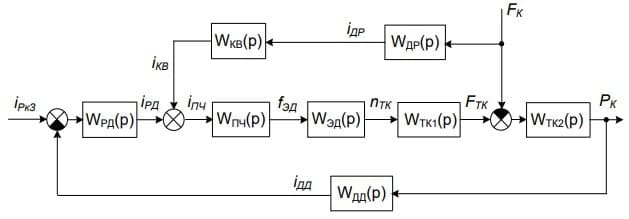
Рисунок 4.3 – Структурная схема САУ давлением кислородного турбокомпрессора
Согласно полученной структурной схемы (рис.3), система автоматического управления давлением кислородного турбокомпрессора состоит из следующих элементов: WТК1(p) и WТК2(p) – передаточные функции турбокомпрессора; WЭД(p) – передаточная функция приводного электродвигателя кислородного турбокомпрессора; WПЧ(p) – передаточная функция пре- образователя частоты; WРД(p) – передаточная функция регулятора давления; WКВ(p) – переда- точная функция компенсатора возмущения; WДР(p), WДД(p) – передаточная функция датчика расхода кислорода и датчика давления.
Разрабатываемая САУ реализуется с использованием комбинированного принципа управления: с обратной связью по управляемой переменной – давлению кислорода на выходе турбокомпрессора РК и компенсационным каналом по основному возмущению – потребляемому расходу кислорода FК (рис.3).
В разрабатываемой САУ управляемая переменная – давление кислорода на выходе турбокомпрессора РК, измеряемая датчиком давления WДД(p), преобразуется в соответствующий электрический сигнал постоянного тока iДД. Выходной сигнал датчика давления iДД сравнивается с токовым сигналом iРК3, который является задающим воздействием в САУ и величина которого определяется по требуемому значению давления кислорода на выходе компрессора РКЗ = 1,6 МПа (рис.3). Сигнал рассогласования поступает на регулятор давления WРД (p), кото рый формирует управляющее воздействие iРД.
В компенсационный канал по возмущению – потребляемому расходу кислорода FК входит датчик расхода кислорода WДР(p) и компенсатор возмущения WКВ(p) (рис.3). Данный канал позволяет учесть в общем управляющем воздействии iПЧ влияние изменяющегося возмущающего воздействия – потребляемого расхода кислорода за счет добавления в общее управляющее воздействие iПЧ сигнала компенсатора возмущения iКВ (рис.3).
Общее управляющее воздействие iПЧ подается на исполнительное устройство, функции которого в разрабатываемой САУ выполняет преобразователь частоты WПЧ (p), который формирует и выдает управляющее воздействие в виде требуемого изменения частоты питающего напряжения fЭД на приводной электродвигатель турбокомпрессора WЭД(p) для требуемого изменения частоты вращения его вала nТК. Вследствие этого изменяется частота вращения вала турбокомпрессора nТК и, соответственно, производительность FТК кислородного турбокомпрессора. Изменение производительности турбокомпрессора приводит к соответствующему изменению давления кислорода РК на выходе турбокомпрессора (рис.3) [11].
Выводы
Анализ конструктивных и технологических особенностей объекта, позволил произвести обзор системы автоматического управления, построенной по комбинированному принципу, который позволит осуществлять выработку сигнала управления, с применением обратной связи по управляемой переменной – PК, а также с учётом компенсации возмущения по потребляемому расходу кислорода – FК, вследствие будет осуществлено поддержание давления кислорода на выходе компрессора на заданном уровне, обеспечивая бесперебойную подачу сжатого кислорода в заводские объекты и установки.
Список источников
- Гаврилов П.Д., Гимельшейн Л.Я., Медведев А.Е. Автоматизация производственных процессов. Учебник для ВУЗов. М.: Недра, 1985, 215с.
- Частотное регулирование производительности компрессоров. НТЦ ЭНЕРГО–РЕСУРС [Электронный ресурс] URL: https://en-res.ru/stati/chastotnoe-regulirovanie-proizvoditelnosti-kompressorov.html.
- Миллер Р. Теория переключательных схем / Р. Миллер. – М.: Наука, 1971. – Том 2: Последовательностные схемы и машины. – 304 с.
- С.А. Абдурашитов, А.А. Тупиченков, И. М. Вершинин, С.М. Тененгольц. Насосы и компрессоры. М.,
Недра
, 1974. 296 с. - Михайлов А.К., Ворошилов В.П. М69. Компрессорные машины: Учебник для вузов. – М. Энергоатомиздат, 1989. 288 с.
- В.И. Елин, К.Н. Солдатов, С.М. Соколовский. Насосы и компрессоры 1958. 353 с.
- Бухарин Н.Н. Моделирование характеристик винтовых компрессоров. – Л.: Машиностроение, 1983. – 214 с.
- Гликман Б. Ф. Математические модели пневмогидравлических систем. – М.: Наука. Гл. ред. физ.– мат., 1986. – 368 с.
- Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. Л.: Энергоиздат. Ленинградское отделение, 1982. – 392 с.
- Важнов А.И. Переходные процессы в машинах переменного тока. Л.: Энергия. Лениградское отделение, 1980. – 256 с.
- Лукас, В.А. Теория автоматического управления. / В.А. Лукас – М.: Недра, 1990. – 416 с.