
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Обзор мобильных роботов
- 2. Описание исследовательского прототипа
- 2.1 Описание принципа работы и устройства меканум-колеса
- 2.2 Принципиальная схема и ее описание
- 3. Разработка системы удаленного управления устройства
- Выводы
- Список источников
Введение
Роботы представляют собой универсальные автоматы для воспроизведения двигательных и интеллектуальных функций человека. Одним из важных классов их являются манипуляционные роботы. Практической целью создания роботов является передача им тех видов деятельности, которые для человека трудоёмки, тяжелы, монотонны, вредны для здоровья и жизни. Это, прежде всего – вспомогательные производственные операции (загрузка и выгрузка установок, станков, автоматов); основные производственные операции (сварка, окраска, резка, сборка и т.д.); работы в так называемых экстремальных условиях (под водой, в космосе, в радиоактивных и ядовитых средах).
Роботы применяются для комплексной автоматизации производства, роста производительности труда, улучшения качества продукции. От традиционных средств автоматизации промышленные роботы отличаются универсальностью, возможностью их быстрой переналадки, что позволяет создавать на базе универсального оборудования роботизированные технологические комплексы, гибкие автоматизированные производства. В результате развития робототехники человечество получает возможность решать принципиально новые научные и производственные задачи.
В отличие от стационарных, большинство мобильных роботов отличаются размерами, возможностью передвижения. Чтобы мобильный робот работал продуктивно и корректно. Мобильному роботу необходима хорошая система управления. Далее пойдет речь о видах роботов, требований к их системам управления и разработке одной из них.
1. Обзор мобильных роботов
Мобильный робот – это автоматический механизм, способный перемещаться в окружающем пространстве.
Автоматизация началась в автомобильной промышленности в годы Второй мировой войны (1946), и происхождение самого термина принадлежит Д.С. Хардеру, менеджеру по проектированию в Ford Motor Company. Сначала этот термин использовался для описания возросшего присутствия автоматических устройств в производственных линиях и исключительно производственных контекстах. В настоящее время автоматизация широко используется во многих отраслях промышленности, где компьютеризированные действия и петли обратной связи могут заменить вмешательство человека на рабочем месте. Со временем развитие в этой области стало все больше зависеть от передовых компьютерных технологий и развития технологических возможностей.
В своем нынешнем виде большинство промышленных роботов имеют механические руки с возможностью выполнять антропоморфные действия. Достижения в миниатюризации компьютеров, математической теории управления, а также усовершенствованные сенсорные технологии оказали большое влияние на системы управления с обратной связью, которые управляют робототехникой. Первый промышленный робот выполнял точечную сварку и литье под давлением на заводе General Motors в Нью-Джерси, США, в 1962 году. Вскоре роботизированные руки взорвались в крупномасштабной обрабатывающей промышленности, и появилось несколько новых компаний, включая Kuka в 1973 году, Nachi в 1969 году, Fanuc в 1974 году, Yaskawa в 1977 году, ASEA в 1977 году и несколько других. К 1980 году, по оценкам, каждый месяц на рынок выходила новая крупная робототехническая компания.
Мобильные роботы в настоящее время испытывают аналогичное расширение, поскольку они становятся значительно более надежными в промышленных условиях. Даже если мобильный робот допускает ошибки, это в конечном итоге будет реже, чем ошибки, вызванные человеческим фактором.
В современном мире роботы приобретают огромную роль во многих сферах человеческой деятельности. Они используются в медицине, сфере обслуживания, военном деле, при проведении спасательных операций. Главной задачей роботов является замена человека при выполнении монотонных и опасных операций. На заре робототехники это были не сложные, либо циклически повторяющиеся процедуры, однако развитие робототехники идет по пути увеличения номенклатуры операций, которые должны выполнять роботы без участия человека.
Современные роботы выполняют разнообразные функции. Например, медицинский робот Da Vinci позволяет проводить сложнейшие операции; марсоходы Spirit, Opportunity и Curiosity доказали, что роботы способны хорошо справляться с задачей изучения Марса; различные роботы использует подразделения ФСБ для предотвращения террористических актов, а также роботы применяются в спасательных формированиях Росатома для ликвидации последствий чрезвычайных ситуаций. Однако даже самые современные образцы роботов не способны выполнять весь комплекс работ самостоятельно. Это говорит о сложности решения задач автономного управления роботов. Поэтому большинство мобильных систем работают под управлением человека- оператора
Диапазон применения робототехники чрезвычайно широк:
– роботы вытесняют человека на производстве. Полная автоматизация многих процессов сводит участие людей в производстве к принятию важных решений и устранению возникающих неисправностей оборудования;
– роботы используются при исследованиях космического пространства и океанских глубин;
– с помощью роботов проводятся сложнейшие хирургические операции на мозге и сердце. Разработаны роботизированные протезы конечностей и некоторых внутренних органов;
– военная техника становится все умней и самостоятельней - управление движением, контроль обстановки, прицеливание и поражение цели производит машина, а человеку остаются решение тактических задач и техническое обслуживание.
Из-за того, что в разрабатываемом прототипе мобильного робота нет возможности измерить ток двигателей, было принято решение использовать одноконтурную систему управления скорости с ПИД регулятором.
На входе регулятора скорости выполняется алгебраическое суммирование сигнала задания скорости UЗ.С и сигналов обратных связей. Постоянно действующая отрицательная ОС по скорости используется для организации контура регулирования скорости. Отрицательная ОС по току, ввиду наличия токовой отсечки ТО, вступает в работу только по превышении током двигателя некоторого максимального значения Iотс, уменьшая входной сигнал РС.
Датчик скорости принят безынерционным.
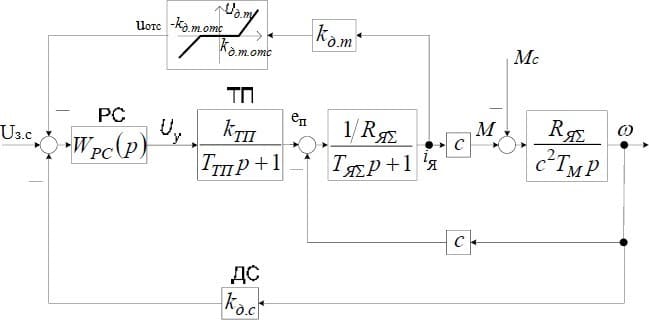
Рисунок 1 – Структурная схема одноконтурной системы регулирования скорости ДПТ
При нормальной работе системы ток якоря двигателя находится в допустимых пределах, и отрицательная ОС по току не действует.
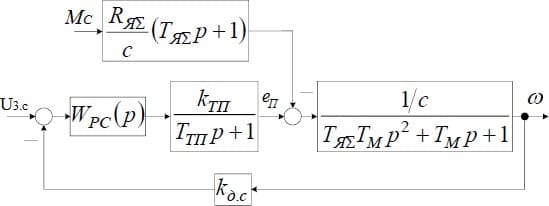
Рисунок 2 – Упрощенная структурная схема одноконтурной системы регулирования скорости
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор – устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД- регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе – интеграл сигнала рассогласования, третье – производная сигнала рассогласования.
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной сигнал равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления при наличии задержек (запаздывания) в системе могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Интегрирующая составляющая пропорциональна интегралу по времени от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку.
Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечиваться интегрирующей составляющей. Тем не менее, интегрирующая составляющая так же может приводить к автоколебаниям при неправильном выборе ее коэффициента.
Дифференцирующая составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
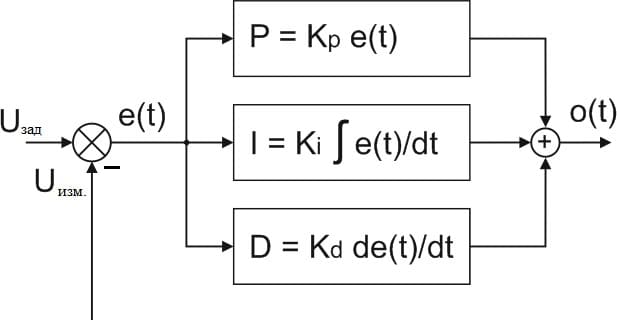
Рисунок 3 – Структурная схема ПИД регулятора
2.Описание исследовательского прототипа
2.1 Описание принципа работы и устройства меканум-колеса
В прототипе мобильного робота используется следующее оборудование:
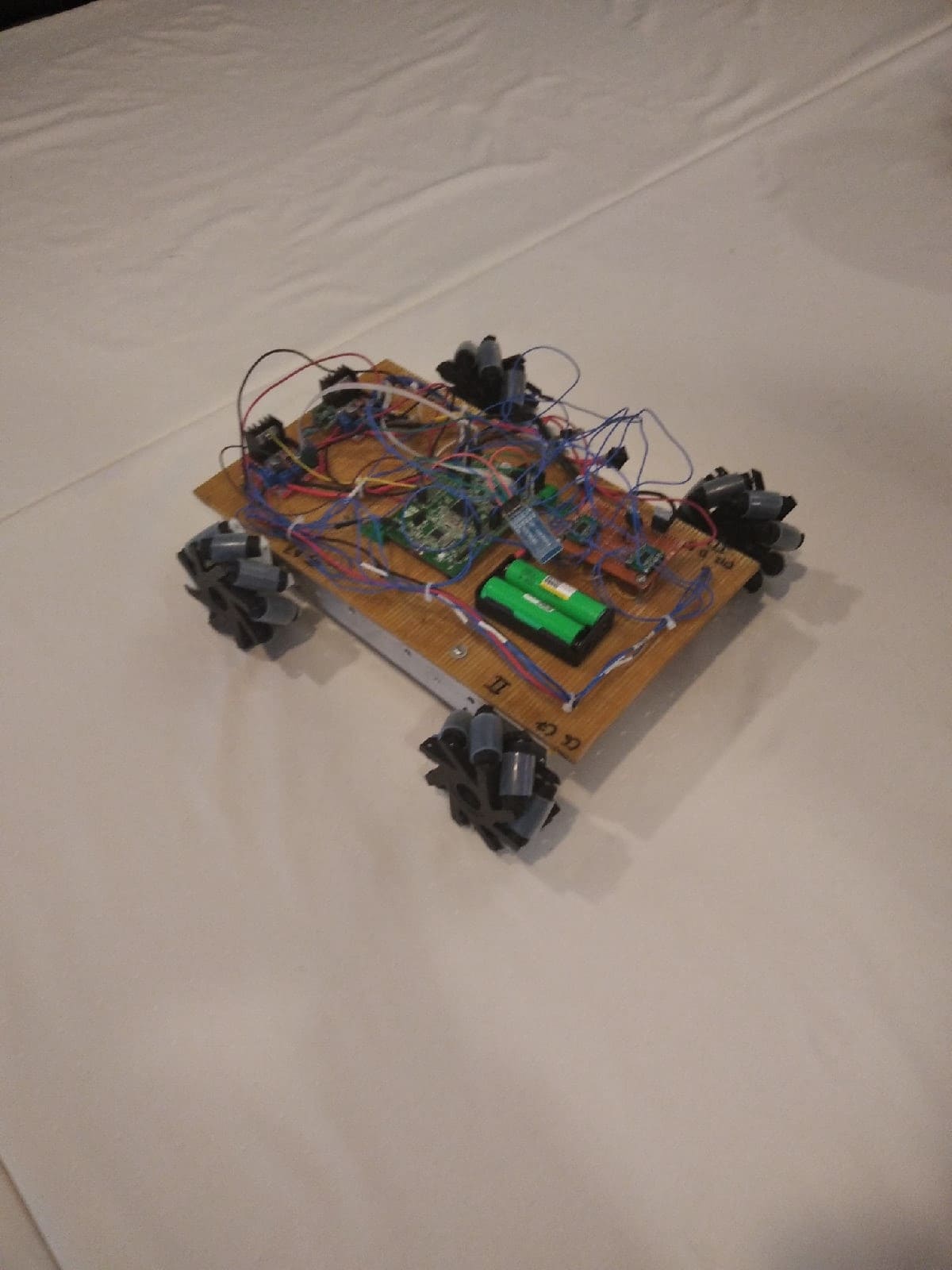
Рисунок 4 – Прототип мобильного робота
Четыре двигателя постоянного тока, оснащенных энкодерами L2523-60002 инкрементального типа.
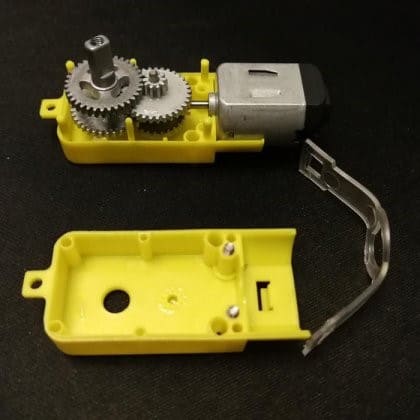
Рисунок 6 – Внешний вид двигателя постоянного тока с энкодером
Энкодер - это устройство, которое предназначено чтобы преобразовать угол поворота вала (измеряемого объекта) в электрические импульсы, по которым можно определить: угол поворота, скорость вращения, направление вращения, и текущее положение относительно начальной точки работы.
В прототипе мобильного робота используются инкрементальные энкодеры. По своей сути инкрементальный энкодер - это счетчик импульсов, которые возникают при вращении вала. Устанавливают энкодер непосредственно на вал или соединяют его через гибкую переходную муфту.
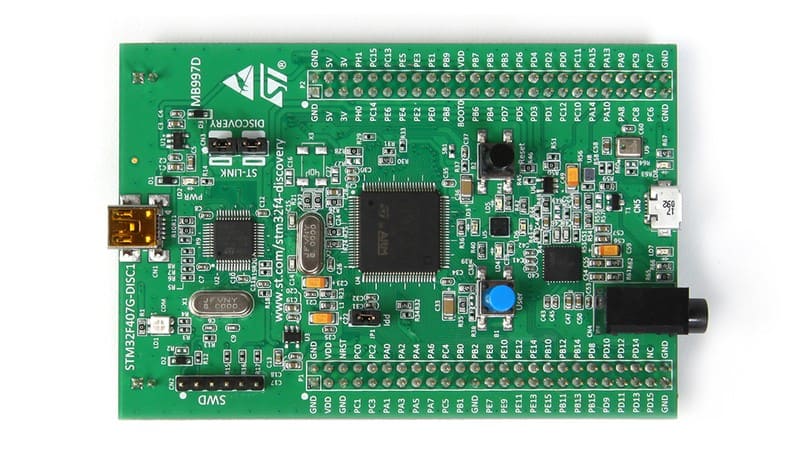
Рисунок 7 – Микроконтроллер STM32F407 – Discovery
Плата STM32F4 Discovery предназначена для ознакомления с возможностями 32-битного микроконтроллера на основе ARM-архитектуры, а также для реализации собственных устройств и приложений с использованием аппаратного обеспечения платы. Архитектура ARM — система команд и семейство описаний и готовых топологий 32-битных и 64-битных микропроцессорных/микроконтроллерных ядер.
Мекановое колесо – это всенаправленная конструкция колеса для наземного транспортного средства для движения в любом направлении. Его иногда называют шведским колесом или колесом Илона в честь его изобретателя Бенгта Эрланда Илона (1923-2008), который задумал концепцию, работая инженером в шведской компании Mecanum AB, и запатентовал ее в Соединенных Штатах 13 ноября 1972 года
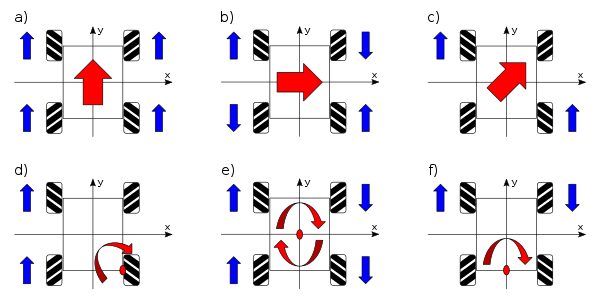
Рисунок 8 – Схема движения мобильного робота на базе меканум-колес
а)Движение прямо вперед, б) Движение вбок, в) Движение по диагонали, г) Движение по изгибу, д) Вращение, е) Вращение вокруг центральной точки одной оси
Типичная конструкция Mecanum - это четырехколесная конфигурация, демонстрируемая одним из всенаправленных мобильных роботов URANUS или инвалидной коляской с колесами Mecanum, с чередованием левых и правых роликов, оси которых наверхняя часть колеса параллельна диагонали рамы транспортного средства (и, следовательно, перпендикулярна диагонали, когда нижняя часть колеса соприкасается с землей). Таким образом, каждое колесо будет генерировать тягу, примерно параллельную соответствующей диагонали рамы. Изменяя скорость вращения и направление каждого колеса, суммирование векторов сил от каждого из колес создаст как линейные движения, так и / или вращения транспортного средства, позволяя ему маневрировать с минимальной потребностью в пространстве.
Например:
– Движение всех четырех колес в одном направлении с одинаковой скоростью приведет к движению вперед / назад, так как векторы продольной силы складываются, но поперечные векторы отменяют друг друга;
– Запуск (все с одинаковой скоростью) обоих колес с одной стороны в одном направлении, а с другой стороны в противоположном направлении приведет к неподвижному вращению транспортного средства, так как поперечные векторы отменяются, но продольные векторы соединяются, чтобы генерировать крутящий момент вокруг центральной вертикальной оси транспортного средства;
– Бег (все с одинаковой скоростью) диагональных колес в одном направлении, в то время как другая диагональ в противоположном направлении приведет к боковому движению, так как поперечные векторы складываются, но продольные векторы отменяются.
– Сочетание дифференциальных движений колес позволит автомобилю двигаться практически в любом направлении с любым вращением.
2.2 Принципиальная схема и ее описание
Принципиальная схема содержит следующие элементы: микроконтроллер STM32F407 – Discovery, два драйвера двигателя L298N, два компаратора AD8544, модуль UART, модуль Bluetoothv3.0, двигатель постоянного тока с энкодером на валу, стабилизатор напряжения на 3,3 В, делитель напряжения 3,3/1,5 В.
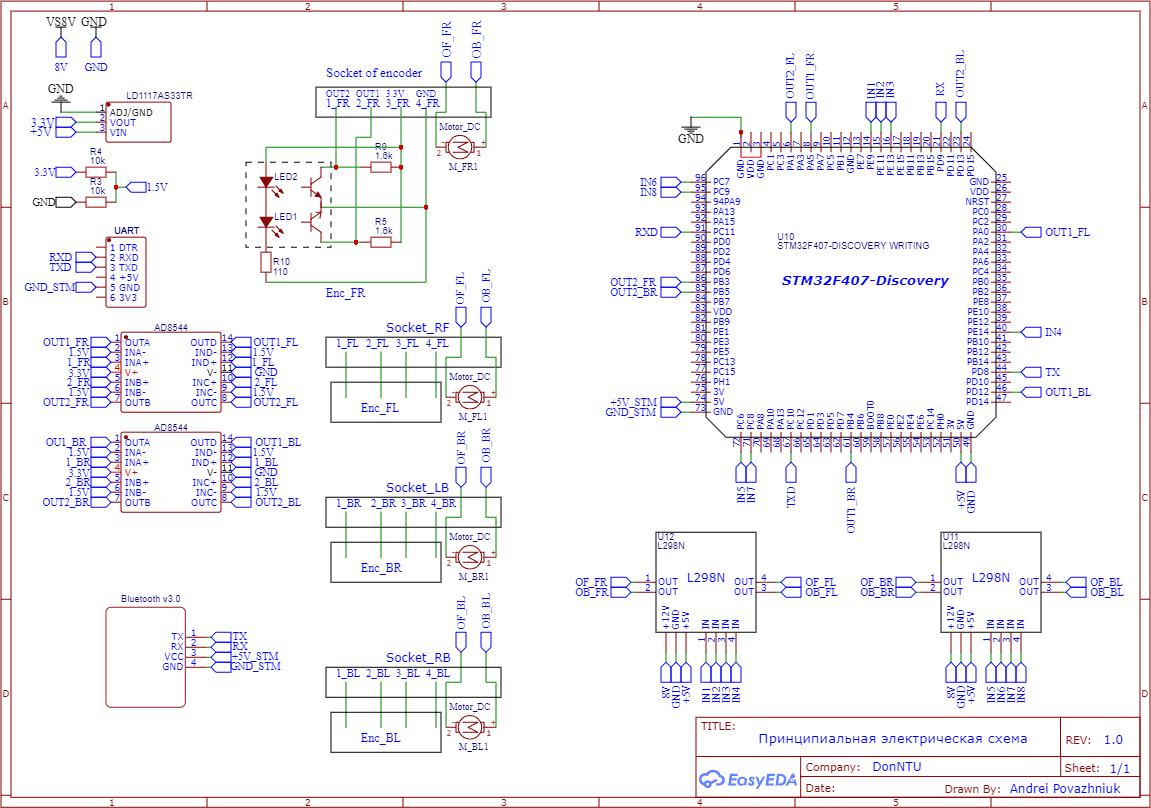
Рисунок 9 – Принципиальная схема мобильного робота на mecanum – колесах
Питание 8 В на схему подается на драйверы с двух последовательно соединенных Li-ion аккумулятора типа US18650GS. С драйвера L298N через встроенный стабилизатор напряжения на 5 В, подается питание на STM32F407 – Discovery и на стабилизатор напряжения на 3,3 В, а с него на делитель напряжения 3,3/1,5 В. С платы STM32F4 питание подается на модули UARTи Bluetooth.
Управление осуществляется через приложение на мобильном устройстве, либо через модуль UART. Сигналы с мобильного передаются через Bluetooth и поступают на плату STM32F4, которая управляет драйверами L298N.
После обработки полученных данных с модулей, микроконтроллер подает сигналы в виде ШИМ на пины драйвера L298N и приводы начинают вращаться в соответствии с заданием.
3.Разработка системы удаленного управления устройства
MIT App Inventor - облачная среда визуальной разработки приложений для платформы OS Android, работа в которой не требует знания языка программирования, достаточно знания элементарных основ алгоритмизации. Для работы в MIT App Inventor необходимо наличие Google или Google Apps аккаунта, а построение программ осуществляется в визуальном режиме с использованием блоков программного кода.

Рисунок 10 – Схема разработки приложения
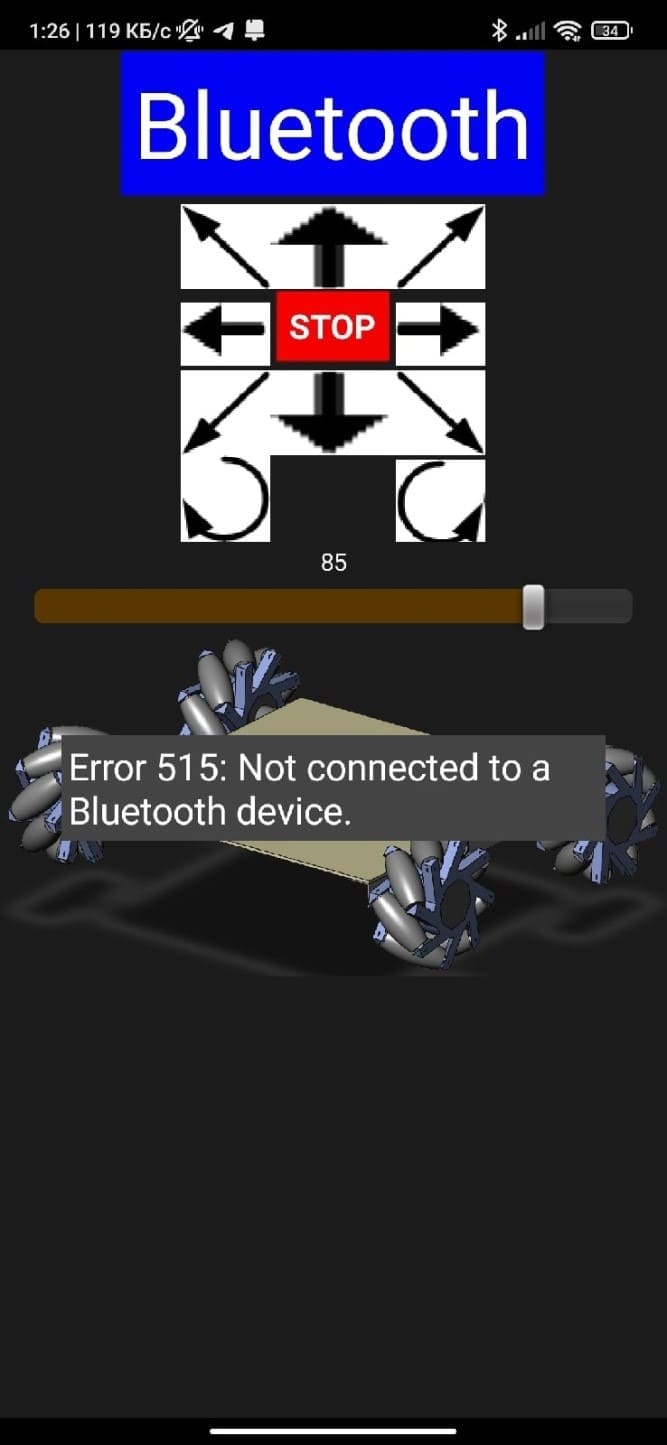
Рисунок 11 – Вид готового приложения
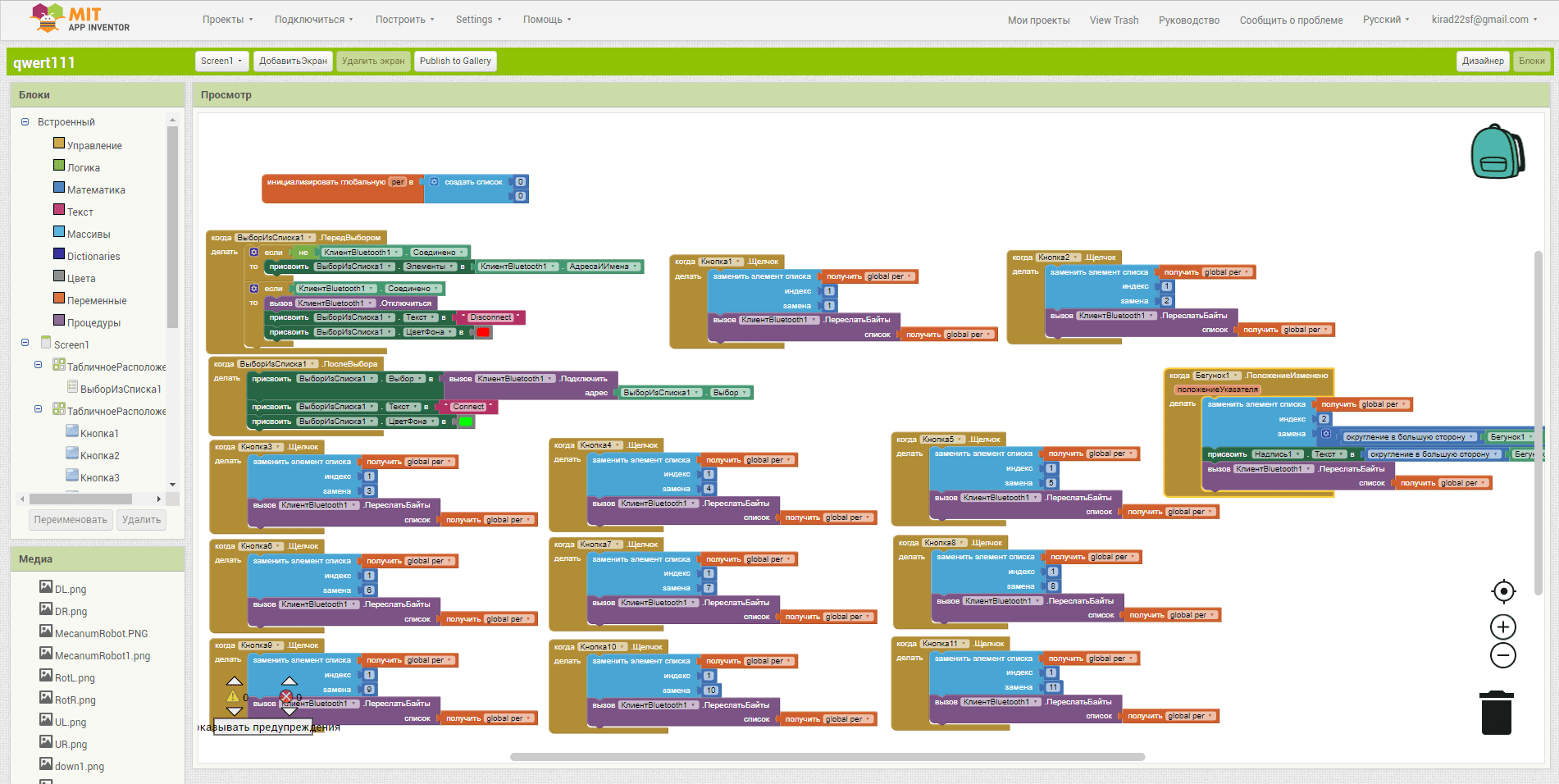
Рисунок 12 – Блочный вид программы управления робота
Нажимая кнопку «Bluetooth», в открывшимся меню нужно выбрать нужный нам Bluetooth-приемник, после чего программа совершит проверку и заменит надпись «Bluetooth» на «Connect» (зеленый фон) или «Disconnect» (красный фон) и далее можно управлять роботом.
Принцип роботы «Бегунка» очень похож на кнопки управления рассмотренные ранее. При изменении положении бегунка происходит замена элемента массива и округление его в большую сторону и прибавляется 100, для удобного представления в процентном соотношении. Также процент скорости выводиться на экран смартфона от 0 до 100.
Выводы
Для выполнения поставленной задачи была модернизирована система управления на базе микроконтроллера STM32F407, разработано приложение на смартфон. Для обеспечения движения робота применяются четыре двигателя постоянного тока, настроен контур регулирования скорости.
Список источников
1. Мобильные роботы: что это такое, виды и классификация [Электронный ресурс]. - Режим доступа: https://vektorus.ru/blog/mobilnye-roboty.html
2. Классификация мобильных роботов [Электронный ресурс]. – Режим доступа:https://helpiks.org/6-11883.html
3. Что такое робототехника? [Электронный ресурс]. – Режим доступа:https://mining-cryptocurrency.ru/robototekhnika/
4. Крауиньш Д.П. Автоматизированный электропривод: учебное пособие / Д.П. Крауиньш; Томский политехнический университет. ? Томск: Изд. Томского политехнического университета, Томск, 2011. – 99 с.
5. L298N Datasheet [Электронный ресурс]. – Режим доступа:https://www.alldatasheet.com/datasheet-pdf/pdf/22440/STMICROELECTRONICS/L298N.html
6. Теория и практика Н-моста [Электронный ресурс]. – Режим доступа:http://www.mcmanis.com/chuck/robotics/tutorial/h-bridge/
7. Аккумуляторная батарея 18650 [Электронный ресурс]. – Режим доступа:https://batareykaa.ru/akkumulyatornaya-batareya-18650