
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Постановка задачи
- 3. Исследование распределенной системы.
- Выводы
- Список источников
Введение
В ходе анализа последних (и текущих) военных конфликтов сложно не заметить, как из года в год все более и более весомую роль них играла беспилотная авиация. Она используются для решения широкого круга задач, включая разведку, удары по целям, а также обеспечение других видов войск. На современном этапе развития БПЛА идут работы по созданию новых ударных БПЛА, способных действовать в составе группы. В связи с этим актуальным является решение задачи по обоснованию структуры распределенной системы управления группой ударных БПЛА и разработке алгоритмов ее функционирования, позволяющих повысить эффективность группового применения ударных БПЛА путем координации их совместных действий в автономном режиме.
1. Актуальность темы
БПЛА используются в вооруженных конфликтах уже более 20 лет, и их роль продолжает расти. Они обладают рядом преимуществ по сравнению с пилотируемыми летательными аппаратами, включая:
• Низкую стоимость
• Возможность длительного нахождения в воздухе
• Слабую восприимчивость к огню противника
Эти преимущества делают БПЛА эффективными инструментами для выполнения широкого спектра задач, включая разведку, наблюдение, удары и поддержку наземных войск.
Групповое применение БПЛА обеспечивает существенные преимущества по сравнению с одиночным применением, вместе с тем в значительной мере усложняет процедуру коллективного управления и требуемого информационного обеспечения. Групповое применение БПЛА позволяет реализовать следующие преимущества:
• Увеличение дальности действия
• Улучшение точности ударов
• Распределение задач между БПЛА
Однако групповое применение БПЛА также связано с рядом сложностей [1-3], включая:
• Необходимость координации действий БПЛА
• Управление информационными потоками между БПЛА
• Формирование коллективного интереса
• Организация координированных взаимодействий
Как показывает практика, одним из наиболее эффективных способов противодействия БПЛА является радиоэлектронная борьба (РЭБ). Системы и средства РЭБ подавляют в первую очередь каналы управления БПЛА и передачи данных, а также создают помехи системам навигации. Это приводит к срыву выполнения полетного задания группой БПЛА, а в некоторых случаях захвату управления и принудительной посадке отдельных из них. Из вышеизложенного следует, что для сохранения высокой эффективности группового применения БПЛА необходимо применять децентрализованную систему управления, способную функционировать в автономном режиме. Децентрализованная система управления не имеет единого центра управления, а каждый БПЛА принимает решения самостоятельно, основываясь на информации, полученной от других БПЛА и от окружающей среды. Такая система управления более устойчива к воздействию РЭБ, поскольку не зависит от каналов управления и передачи данных. Кроме того, для координации совместных действий группы (групп) БПЛА такая система управления должна иметь еще и самоорганизующуюся структуру, способную адаптироваться к любой обстановке. Самоорганизующаяся структура системы управления позволяет БПЛА самостоятельно формировать группы и распределять задачи между собой в соответствии с текущей обстановкой. Это повышает эффективность действий группы БПЛА и снижает риск их поражения. Поэтому работа по созданию новых и совершенствованию существующих систем управления групповыми действиями БПЛА является актуальной научной задачей. Разработка децентрализованных систем управления групповыми действиями БПЛА является сложной научно-технической задачей. Для ее решения необходимо использовать новейшие достижения в области искусственного интеллекта, теории управления и обработки информации. Для создания децентрализованной системы управления группой БПЛА предлагается использовать методы и теорию распределенных мультиагентных систем. Распределенные мультиагентные системы представляют собой совокупность автономных агентов, взаимодействующих друг с другом для достижения общей цели. Методы и теория распределенных мультиагентных систем позволяют разрабатывать децентрализованные системы управления, которые обладают высокой устойчивостью, эффективностью и адаптивностью.
В частности, для создания децентрализованной системы управления группой БПЛА можно использовать следующие подходы:
• Использование агентов, обладающих интеллектом и способностью к обучению.
• Применение методов коллективного принятия решений.
• Использование методов самоорганизации.
2. Постановка задачи
Одной из ключевых задач применения ударных беспилотных летательных аппаратов (БПЛА) является повышение их эффективности в групповом применении. Для этого необходимо обеспечить координацию совместных действий группы БПЛА в автономном режиме, то есть без участия оператора.
Сетецентрическая система управления
Системы группового управления БПЛА предназначены для координации действий группы БПЛА в рамках решения общей задачи. Существует несколько основных типов систем группового управления:
• Централизованное управление. В этом случае все команды, передаваемые на БПЛА, формируются на пункте управления (ПУ). ПУ имеет полный контроль над группой БПЛА, что позволяет обеспечить высокую эффективность выполнения задачи, но также приводит к высокой уязвимости системы, поскольку ПУ является единственной точкой отказа.
• Децентрализованное управление. В этом случае индивидуальные команды для каждого БПЛА формируются внутри группы, обеспечивая достижение общей цели. Децентрализованные системы управления более устойчивы к отказам, чем централизованные, но при этом могут быть менее эффективными, поскольку не позволяют использовать весь потенциал группы БПЛА.
• Управление с лидером. В этом случае на ПУ формируются команды управления отдельными объектами (лидерами), каждый из которых, в свою очередь, управляет несколькими подчиненными БПЛА. Управление подчиненными БПЛА осуществляется лидером с помощью децентрализованных методов. Управление с лидером сочетает в себе преимущества централизованного и децентрализованного управления, обеспечивая высокую эффективность и устойчивость к отказам.
Коллективное управление в составе сетецентрической системы управления Коллективное управление в составе сетецентрической системы управления [2, 3] является одним из наиболее эффективных способов решения задачи координации действий группы БПЛА. В рамках сетецентрической системы управления каждый БПЛА обменивается информацией с другими БПЛА и оператором, что позволяет им совместно принимать решения о действиях группы. Основные преимущества коллективного управления в составе сетецентрической системы управления:
• Высокая эффективность. Коллективное управление позволяет использовать весь потенциал группы БПЛА, что может привести к значительному повышению эффективности выполнения задачи.
• Устойчивость к отказам. Коллективное управление более устойчиво к отказам, чем централизованные системы управления. В случае отказа одного или нескольких БПЛА группа может продолжать выполнять задачу.
• Гибкость. Коллективное управление позволяет адаптировать действия группы к меняющимся условиям окружающей среды.
Рисунок 1 – Сетецентрическая схема
Распространенные недостатки существующих систем группового управления БПЛА:
• Централизованное управление является уязвимым к отказам, поскольку ПУ является единственной точкой отказа.
• Децентрализованное управление может быть менее эффективным, чем централизованное управление, поскольку не позволяет использовать весь потенциал группы БПЛА.
• Управление с лидером сочетает в себе преимущества централизованного и децентрализованного управления, но также может быть уязвимым к отказам, поскольку лидер является единственной точкой отказа.
3. Исследование распределенной системы.
В связи с вышеизложенными существенными недостатками имеющихся систем группового управления, на основе сетецентрической, предлагается распределённая система управления группой ударных БПЛА, отличающаяся тем, что управление групповыми действиями ударных БПЛА осуществляются в автономном режиме, что позволяет обеспечить скрытность, минимизировать потери со стороны группы ударных БПЛА, максимизировать наносимый ущерб противнику и повысить эффективность атаки группой ударных БПЛА в целом (рис. 2).
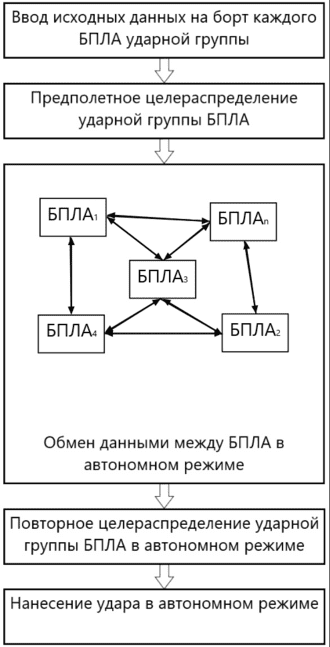
Рисунок 2 – Схема РСУ группой ударных БПЛА при координированной атаке стационарных разнородных объектов противника
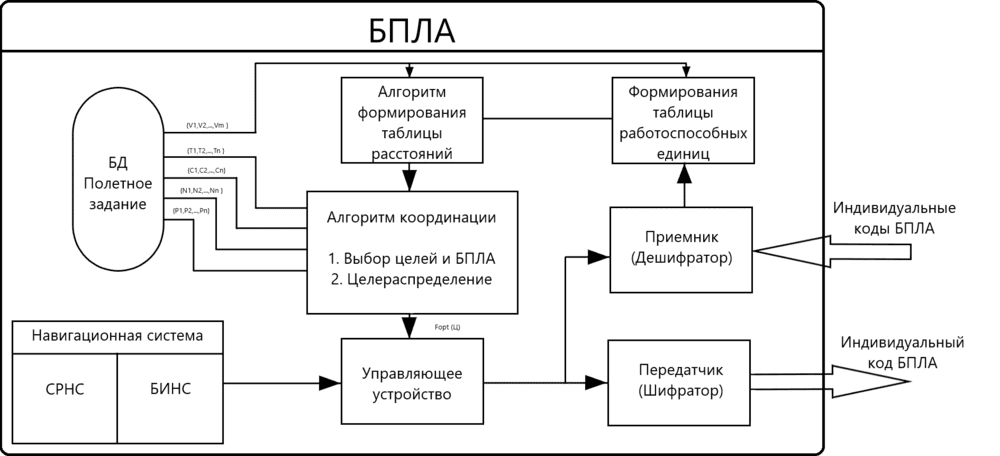
Рисунок 3 – Структура функционирования аппаратуры ударных БПЛА при координации совместных действий с РСУ
Преимущества распределённой системы управления группой ударных БПЛА [2, 4] в автономном режиме:
• Скрытность. В автономном режиме группа ударных БПЛА может действовать более скрытно, поскольку не требуется обмен информацией с ПУ. Это может затруднить обнаружение и поражение группы противником.
• Минимизация потерь. В автономном режиме группа ударных БПЛА может принимать решения на основе информации, полученной от всех БПЛА в группе. Это позволяет более эффективно распределять задачи и ресурсы, что может привести к снижению потерь.
• Максимизация ущерба. В автономном режиме группа ударных БПЛА может более эффективно адаптироваться к меняющимся условиям окружающей среды. Это позволяет нанести максимальный ущерб противнику.
• Повышение эффективности атаки. В целом, распределённая система управления группой ударных БПЛА в автономном режиме может повысить эффективность атаки группой ударных БПЛА.
Особенности распределённой системы управления группой ударных БПЛА в автономном режиме:
• Каждый БПЛА в группе имеет автономную бортовую систему управления (БСУ). БСУ каждого БПЛА отвечает за выполнение следующих функций:
1)Прием и обработка информации от других БПЛА и ПУ; 2)Формирование плана действий для конкретного БПЛА; 3)Реализация плана действий.• БПЛА обмениваются информацией между собой с помощью беспроводной связи. Это позволяет им обмениваться информацией о своем местоположении, состоянии, цели и других данных.
• ПУ используется для постановки задачи и контроля за ходом выполнения задачи. ПУ может передавать команды на БПЛА, но БПЛА не обязаны выполнять эти команды.
Распределенную систему управления группой БПЛА можно описать как набор S={V,{Pi,j}}, где V – множество БПЛА, P – предикаты, а индекс i обозначает арность отношения (или количество мест предиката), а индекс j дает возможность различать отношения одной и той же арности.
При предполётной подготовке в базу данных (БД) каждого БПЛА вводятся координаты всех атакуемых объектов {T1,T2,...,Tn}, предварительно полученные экспертами оценки коэффициентов их важности {C1,C2,...,Cn}, значения потребных нарядов ударных БПЛА на каждый атакуемый объект {N1,N2,...,Nn}, координаты промежуточных пунктов маршрута (ППМ), множество БПЛА группы со своими идентификационными номерами {V1,V2,...,Vn} и полная таблица первичного целераспределения в которой каждому БПЛА группы с индивидуальным кодом Vj задана Ti цель (полётное задание).
В простейшем случае полет группы БПЛА в автономном режиме можно обеспечить, используя навигационную подсистему, состоящую из спутниковой радионавигационной системы (СРНС) и бесплатформенной инерциальной системы наведения (БИНС) в сомкнутых порядках. Для избегания столкновений БПЛА в группе можно определить безопасные интервалы, дистанции и высоты полета, которые вычисляются по максимальным ошибкам БИНС на заданном пути, и выставить их при начальном сборе группы под управлением операторов.
После преодоления группой ударных БПЛА активной зоны ПВО противника в автономном режиме, в определённый момент времени БСУ каждого ударного БПЛА излучают свою и осуществляют приём от других БСУ группы коротких кодовых посылок с идентификационным номером и текущими координатами. Для обеспечения одновременного момента излучения идентификационных номеров необходимо синхронизировать бортовые часы всех БПЛА группы и задать требуемое время.
После приема и дешифрования сигналов идентификационных номеров на борту каждого БПЛА в РСУ будет содержаться информация о работоспособных и не сбитых БПЛА группы (предикат работоспособности) и их текущие координаты (предикат местоположения). На основе имеющихся данных о координатах атакуемых объектов противника и работоспособных БПЛА, в БСУ каждого ударного БПЛА определяются расстояния (дальности) от каждого ударного БПЛА до каждого атакуемого объекта противника.
С учетом введённых данных о коэффициентах важности всех атакуемых объектов {C1,C2,...,Cn}, потребных нарядах ударных БПЛА на каждый атакуемый объект {N1,N2,...,Nn} и имеющейся информации о дальностях до них, в БСУ каждого ударного БПЛА группы осуществляется процесс повторного целераспределения оставшихся после преодоления зоны ПВО ударных БПЛА. Поскольку БСУ каждого БПЛА решает задачу повторного целераспределения с одинаковыми исходными данными и по единому алгоритму, учитывающему только работоспособные БПЛА, то это решение будет одинаковым на всех бортах. Отсюда следует, что при такой распределенной системе управления больше не требуется передачи никаких дополнительных команд, что обеспечивает автономность работы группы, а БПЛА группы самоорганизуются в соответствии с решением повторного целераспределения.
Таким образом, рассмотренный подход позволяет группе ударных БПЛА нанести максимально возможный ущерб атакуемым объектам противника без участия операторов. Ниже рассмотрим более подробно алгоритм повторного целераспределения группы ударных БПЛА. Повторное целераспределение группы ударных БПЛА в автономном режиме предлагается осуществлять по следующему алгоритму [9]. Вероятность успешной атаки группой ударных БПЛА напрямую зависит от вероятности преодоления ПВО противника, которая в свою очередь обратно пропорциональна времени полета ударных БПЛА до объектов атаки. Поэтому при целераспределении ударных БПЛА предлагается использовать матрицу расстояний от каждого оставшегося после преодоления ПВО ударного БПЛА до каждого объекта атаки на основе информации о потребных нарядах Nm ударных БПЛА на каждый атакуемый объект противника и дальностях до них. В результате в РСУ группы ударных БПЛА формируется матрица R размером m?n, где m – количество ударных БПЛА в группе, а n – количество атакуемых объектов противника. Расстояния rij от каждого j-го ударного БПЛА до каждого i-го атакуемого объекта противника указываются на пересечении строк и столбцов данной матрицы.
Решение задачи целераспределения осуществляется наиболее быстродействующим методом линейного программирования, в частности Венгерским методом. В общем случае задача целераспределения ударных БПЛА может быть решена на основе анализа матрицы размерностью n:m
Задача целераспределения является оптимизационной задачей, которую традиционные алгоритмы решают с заметными временными задержками из-за большого количества итераций. В связи с этим необходимо отметить, что в качестве элементов матрицы могут быть выбраны другие показатели эффективности и другие критерии оптимизации решения задачи целераспределения в зависимости от постановки боевой задачи, соотношения числа ударных БПЛА и целей, типа целей, используемых АСП и т.д. Таким образом, решение задачи целераспределения можно представить в виде коэффициентов инцидентной матрицы [9]
Таким образом, задача целераспределения сводится к нахождению матрицы, расчета решающих функционалов, определению наилучшей комбинации по правилу, а значит и соответствующей матрицы решений.[10]
Решение задачи на данном этапе относится к процессу предварительного (предполётного) целераспределения. После преодоления зоны ПВО каждым ударным БПЛА группы производится формирование и передача данных о своих текущих координатах и оценка возможных потерь в предлагаемой РСУ группы ударных БПЛА в автономном режиме. Если потерь нет (Nпот=0), то осуществляется первичное (предполётное) целераспределение, если потери есть (Nпот>0), то осуществляется процесс повторного целераспределения ударных БПЛА в автономном режиме, который может быть реализован методом не полного перебора, путём расчёта интегрального показателя эффективности, учитывающего важность каждого i-го объекта атаки Ci и вероятность боевого успеха Wij каждого j-го потребного наряда ударных БПЛА при каждом варианте возможных потерь и выбора рационального варианта целераспределения, соответствующего максимальному интегральному показателю эффективности.
После распределения группы ударных БПЛА по атакуемым стационарным разнородным объектам противника, осуществляется нанесение удара в автономном режиме. Алгоритм целераспределения в предлагаемой РСУ группой ударных БПЛА в автономном режиме запрограммирован в среде MATLAB, проведена оценка эффективности координированной атаки группой ударных БПЛА с использованием разработанного алгоритма в предлагаемой РСУ и без его использования
Выводы
В заключение на основе анализа полученных результатов можно отметить следующее:
- Была обоснована необходимость применения распределенной сетецентрической системы управления группой ударных БПЛА для обеспечения автономных действий, без участия операторов на заключительном этапе полетного задания, чего не было сделано в существующих работах;
- Предложенная в работе РСУ может быть использована при проектировании новых ударных БПЛА, а алгоритмы, лежащие в её основе могут быть реализованы в современных БЦВМ;
- Для достижения максимальной эффективности (координации) действий групп ударных БПЛА в РСУ, требуется процедура идентификации работоспособных БПЛА, заключающаяся в трансляции индивидуальных опознавательных кодов и текущих координат БПЛА в заданном интервале времени, что требует иметь на борту каждого БПЛА аппаратуру приема-передачи шифрованных индивидуальных кодов и предполетную синхронизацию временных систем БПЛА группы;
- для оценки эффективности групповых действий предлагается использовать новый интегральный показатель, учитывающий важность целей и вероятности их поражений, что не использовалось в существующих работах;
Список источников
- Верба В. С., Меркулов В.И. Авиационные системы радиоуправления. Монография. – М.: Радиотехника, 2014. – 376 с.
- Верба В. С. Авиационные комплексы радиолокационного дозора и наведения. Принципы построения, проблемы разработки и особенности функционирования. Монография. – М.: Радиотехника, 2014. – 528 с.
- Смирнов С. В. Анализ способов и средств управления авиацией с авиационного комплекса радиолокационного дозора и наведения // Системы управления, связи и безопасности. 2017. № 2. С. 69-100.
- Меркулов В. И., Миляков Д. А., Самодов И. О. Оптимизация алгоритма группового управления беспилотными летательными аппаратами в составе локальной сети // Известия ЮФУ. Технические науки. 2014. № 12 (161). С. 157-166
- Евдокименков В. Н., Красильщиков М. Н., Себряков Г. Г. Распределенная интеллектуальная система управления группой беспилотных летательных аппаратов: архитектура и программно-математическое обеспечение // Известия ЮФУ. Технические науки. 2016. № 1 (174). С. 29-44.
- Godwin M. F., Spry S. C., Hedrick J. K. A Distributed System for Collaboration and Control of UAV Groups: Experiments and Analysis. – Center for the Collaborative Control of Unmanned Vehicles University of California, Berkeley, 2007. – 224 p.
- Война дронов // Информационный портал [Электронный ресурс]. 2018. – URL: https://life.ru/t/сирия/1076718/voina_dronov (дата обращения 05.05.2018).
- Бутковский А. Г. Структурная теория распределенных систем. – М.: Наука, 1977. – 320 с.
- Мефедов А. В. Алгоритм оптимального целераспределения автономной группы ударных беспилотных летательных аппаратов // Информация и космос. 2018. № 3. С. 167-171.
- Broeder G. G., Ellison G. G., Emerling R. E. On Optimum Target Assignments // Operations Research. 1959. Vol. 7. P. 322-326.