
Abstract
Contents
- Introduction
- 1. Theme urgency
- 2. Formulation of the problem
- 3. Distributed system research
- Conclusion
- References
Introduction
In the course of analyzing recent (and current) military conflicts, it is difficult not to notice how the role of unmanned aviation has become more and more significant from year to year. It is used to solve a wide range of tasks, including reconnaissance, strikes against targets, and support of other types of troops. At the present stage of the development of UAVs, work is underway to create new strike UAVs capable of operating as part of a group. In this regard, it is an urgent task to substantiate the structure of a distributed control system for a group of strike UAVs and to develop algorithms for its operation that allow to improve the efficiency of the group use of strike UAVs by coordinating their joint actions in autonomous mode.
1. Theme urgency
Unmanned aerial vehicles (UAVs) have been used in armed conflicts for over 20 years, and their role continues to grow. They have a number of advantages over piloted aircraft, including:
• Low cost
• Possibility of long-term stay in the air
• Weak susceptibility to enemy fire
These advantages make UAVs effective tools for a wide range of tasks, including reconnaissance, surveillance, strikes, and ground support.
Group use of UAVs provides significant advantages over single use, but at the same time significantly complicates the procedure of collective control and the required information support. Group use of UAVs allows to implement the following advantages:
• Increased range
• Improving punch accuracy
• Distribution of tasks between UAVs
However, the group use of UAVs is also associated with a number of challenges, including:
• The need to coordinate UAV actions
• Managing information flows between UAVs
• Formation of collective interest
• Organization of coordinated interactions
As practice shows, one of the most effective ways to counter UAVs is electronic warfare (EW). EW systems and means suppress, first of all, the control channels of UAVs and the transmission of data, and also create interference in navigation systems. This leads to the disruption of the flight mission of a group of UAVs, and in some cases to the seizure of control and forced landing of individual ones. From the above, it follows that in order to maintain high efficiency of the group use of UAVs, it is necessary to use a decentralized control system that can function in autonomous mode. A decentralized control system does not have a single control center, and each UAV makes decisions independently, based on information received from other UAVs and from the environment. Such a control system is more resistant to EW effects, since it does not depend on control and data transmission channels. In addition, for the coordination of joint actions of a group (groups) of UAVs, such a control system must also have a self-organizing structure that can adapt to any situation. The self-organizing structure of the control system allows UAVs to independently form groups and distribute tasks among themselves in accordance with the current situation. This increases the effectiveness of the actions of a group of UAVs and reduces the risk of their defeat. Therefore, the work on the creation of new and the improvement of existing systems for managing the group actions of UAVs is an urgent scientific task. The development of decentralized control systems for group actions of UAVs is a complex scientific and technical task. To solve it, it is necessary to use the latest achievements in the field of artificial intelligence, control theory, and information processing. To create a decentralized control system for a group of UAVs, it is proposed to use the methods and theory of distributed multi-agent systems. Distributed multi-agent systems are a collection of autonomous agents that interact with each other to achieve a common goal. The methods and theory of distributed multi-agent systems allow for the development of decentralized control systems that are highly resilient, efficient, and adaptive.
In particular, the following approaches can be used to create a decentralized control system for a group of UAVs:
• Using agents with intelligence and learning ability.
• Application of collective decision-making methods.
• Using self-organization methods.
2. Formulation of the problem
One of the key challenges of using armed unmanned aerial vehicles (UAVs) is to improve their effectiveness in group use. To do this, it is necessary to ensure the coordination of the joint actions of a group of UAVs in autonomous mode, that is, without the participation of an operator.
Network-centric control system
Systems of group control of UAVs are designed to coordinate the actions of a group of UAVs within the framework of solving a common task. There are several main types of group control systems:
• Centralized control. In this case, all commands transmitted to the UAVs are generated at the control point (CP). The CP has full control over the group of UAVs, which allows for high efficiency in task execution, but also leads to high vulnerability of the system, since the CP is the single point of failure.
• Decentralized control. In this case, individual commands for each UAV are generated within the group, ensuring the achievement of the common goal. Decentralized control systems are more resistant to failures than centralized ones, but at the same time they can be less effective, since they do not allow using the full potential of the group of UAVs.
• Leader-based control. In this case, control commands for individual objects (leaders) are generated at the CP, each of which, in turn, controls several subordinate UAVs. The control of subordinate UAVs is carried out by the leader using decentralized methods. Leader-based control combines the advantages of centralized and decentralized control, providing high efficiency and fault tolerance.
Collective control in a network-centric control system Collective control in a network-centric control system is one of the most effective ways to solve the problem of coordinating the actions of a group of UAVs. Within the framework of a network-centric control system, each UAV exchanges information with other UAVs and the operator, which allows them to jointly make decisions about the actions of the group. The main advantages of collective control in a network-centric control system are as follows:
• High efficiency. Collective control allows you to use the full potential of a group of UAVs, which can lead to a significant increase in the efficiency of task execution.
• Fault tolerance. Collective control is more fault-tolerant than centralized control systems. In the event of a failure of one or more UAVs, the group can continue to perform the task.
• Flexibility. Collective control allows the group's actions to be adapted to changing environmental conditions.
Image 1 – Network-centric scheme
Common shortcomings of existing UAV group control systems:
• Centralized control is vulnerable to failures, as the GCS is a single point of failure.
• Decentralized control can be less efficient than centralized control, as it does not allow for the full potential of the group of UAVs to be utilized.
• Leader-based control combines the advantages of centralized and decentralized control, but it can also be vulnerable to failures, as the leader is a single point of failure.
3. Distributed system research
Due to the above-mentioned significant disadvantages of existing group control systems based on a network-centric approach, a distributed control system for a group of strike UAVs is proposed. This system differs in that the control of group actions of strike UAVs is carried out in an autonomous mode. This allows to ensure stealth, minimize losses on the part of the group of strike UAVs, maximize damage inflicted on the enemy, and improve the effectiveness of the attack by a group of strike UAVs in general. (im. 2).
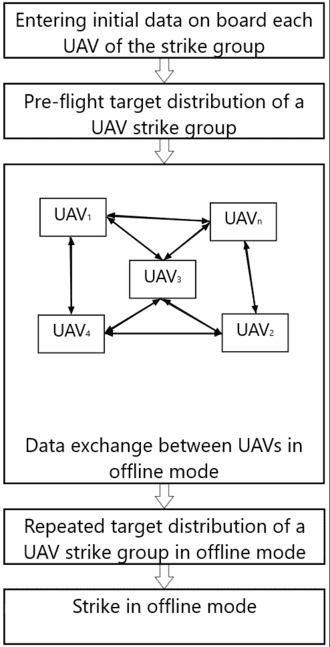
Image 2 – DCS diagram of a group of attack UAVs during a coordinated attack of stationary heterogeneous enemy objects
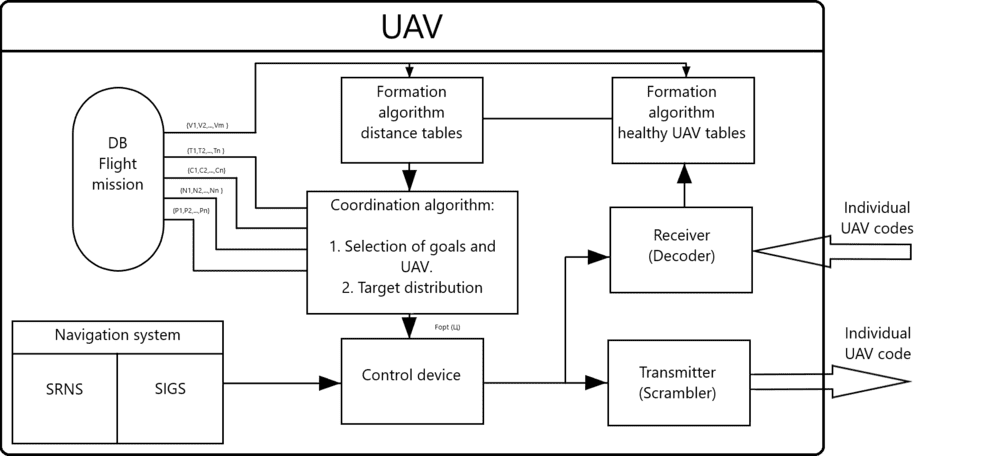
Image 3 – The structure of the functioning of attack UAV equipment when coordinating joint actions with the DCS
Advantages of a distributed control system for a group of strike UAVs in autonomous mode:
• Secrecy. In autonomous mode, a group of strike UAVs can operate more covertly, as there is no need to exchange information with the GCS. This can make it more difficult for the enemy to detect and defeat the group.
• Minimizing losses. In autonomous mode, a group of strike UAVs can make decisions based on information received from all UAVs in the group. This allows for more efficient task and resource allocation, which can lead to reduced losses.
• Maximizing damage. In autonomous mode, a group of strike UAVs can more effectively adapt to changing environmental conditions. This allows them to inflict maximum damage on the enemy.
• Increased attack effectiveness. Overall, a distributed control system for a group of strike UAVs in autonomous mode can increase the effectiveness of an attack by a group of strike UAVs.
Features of a distributed control system for a group of strike UAVs in autonomous mode:
• Each UAV in the group has an autonomous onboard control system (OCS). The OCS of each UAV is responsible for performing the following functions:
1)Receiving and processing information from other UAVs and the ground control station (GCS) 2)Developing a plan of action for a specific UAV 3)Implementing the plan of action• UAVs exchange information with each other using wireless communication. This allows them to share information about their location, status, target, and other data.
• The ground control station (GCS) is used to assign tasks and monitor the progress of tasks. The GCS can send commands to UAVs, but UAVs are not required to follow these commands.
A distributed control system for a group of UAVs can be described as a set S={V,{Pi,j}}, where V – is the set of UAVs, P – are predicates, and the index i denotes the arity of the relation (or the number of places in the predicate), and the index j allows us to distinguish between relations of the same arity.
During pre-flight preparation, the coordinates of all target objects are entered into the database (DB) of each UAV. {T1,T2,...,Tn}, preliminary estimates of the importance coefficients obtained by experts {C1,C2,...,Cn}, the values of the required number of attack UAVs for each target object {N1,N2,...,Nn}, the coordinates of intermediate waypoints (IPWs), the set of UAVs in the group with their identification numbers {V1,V2,...,Vn} and a complete table of initial target allocation in which each UAV in the group with an individual code Vj is assigned a Ti target (flight task)
In the simplest case, the flight of a group of UAVs in autonomous mode can be ensured by using a navigation subsystem consisting of a satellite radio navigation system (GNSS) and a strapdown inertial navigation system (INS) in closed loop. To avoid collisions between UAVs in a group, safe intervals, distances, and flight altitudes can be determined based on the maximum INS errors on a given path, and they can be set at the initial group assembly under the control of operators.
After a group of attack UAVs has overcome the enemy's active air defense zone in autonomous mode, at a certain point in time, the BMS of each attack UAV will transmit its own and receive short code packets with an identification number and current coordinates from other BMSs in the group. To ensure that the identification numbers are transmitted simultaneously, it is necessary to synchronize the onboard clocks of all the UAVs in the group and set the required time.
After receiving and decrypting the identification number signals, each UAV will have information on the operational and undamaged UAVs in the group (predicate of operability) and their current coordinates (predicate of location) in its RSU. Based on the available data on the coordinates of the enemy's attack objects and the operational UAVs, the BMS of each attack UAV will determine the distances (ranges) from each attack UAV to each enemy attack object.
Based on the entered data on the importance coefficients of all attack objects {C1,C2,...,Cn}, the required number of attack UAVs per attack object {N1,N2,...,Nn} and the available information on the distances to them, the BMS of each attack UAV in the group performs the process of re-target allocation for the remaining attack UAVs after overcoming the air defense zone. Since the BMS of each UAV solves the problem of re-target allocation with the same input data and using a single algorithm that takes into account only operational UAVs, then this solution will be the same on all boards. Hence, it follows that with such a distributed control system, there is no need to transmit any additional commands, which ensures the autonomy of the group's operation, and the group's UAVs self-organize in accordance with the decision of the re-target allocation.
Thus, the approach considered allows a group of attack UAVs to inflict the maximum possible damage on enemy attack objects without the participation of operators. Below we will consider in more detail the algorithm for the repeated target allocation of a group of attack UAVs. The repeated target allocation of a group of attack UAVs in autonomous mode is proposed to be carried out according to the following algorithm. The probability of a successful attack by a group of attack UAVs directly depends on the probability of overcoming the enemy's air defense, which in turn is inversely proportional to the flight time of the attack UAVs to the attack objects. Therefore, when allocating attack UAVs, it is proposed to use a matrix of distances from each attack UAV remaining after overcoming the air defense to each attack object based on information about the required number of Nm attack UAVs for each enemy attack object and the distances to them. As a result, a matrix R of size m x n is formed in the RSU of a group of attack UAVs, where m is the number of attack UAVs in the group and n is the number of enemy attack objects. The distances rij from each j-th attack UAV to each i-th enemy attack object are indicated at the intersection of the rows and columns of this matrix.
The solution of the targeting problem is carried out by the fastest method of linear programming, in particular, the Hungarian method. In general, the targeting problem of attack UAVs can be solved on the basis of the analysis of a matrix with a dimension of n:m
The target allocation problem is an optimization problem that traditional algorithms solve with noticeable time delays due to the large number of iterations. In this regard, it is necessary to note that other efficiency indicators and other optimization criteria for solving the target allocation problem can be selected as matrix elements, depending on the setting of the combat mission, the ratio of the number of attack UAVs to targets, the type of targets, used ASPs, etc. Thus, the solution of the target allocation problem can be presented in the form of the coefficients of the incidence matrix.
Therefore, the target allocation problem is reduced to finding a matrix, calculating decision functions, determining the best combination according to the rule, and thus the corresponding decision matrix.
The solution of the problem at this stage refers to the process of preliminary (pre-flight) target allocation. After overcoming the air defense zone, each attack UAV in the group forms and transmits data about its current coordinates and evaluates the possible losses in the proposed RSU of a group of attack UAVs in autonomous mode. If there are no losses (Npot=0), then the primary (pre-flight) target allocation is carried out, if there are losses (Npot>0), then the process of repeated target allocation of attack UAVs in autonomous mode is carried out, which can be implemented by the method of incomplete enumeration, by calculating the integral efficiency indicator, taking into account the importance of each i-th attack object Ci and the probability of combat success Wij of each j-th required squadron of attack UAVs for each variant of possible losses and the choice of a rational variant of target allocation corresponding to the maximum integral efficiency indicator.
After the group of attack UAVs is allocated to the attacked stationary heterogeneous enemy objects, the attack is carried out in autonomous mode. The target allocation algorithm in the proposed RSU for a group of attack UAVs in autonomous mode is programmed in the MATLAB environment, and the evaluation of the effectiveness of a coordinated attack by a group of attack UAVs using the developed algorithm in the proposed RSU and without its use has been carried out.
Conclusion
In conclusion, based on the analysis of the obtained results, the following can be noted:
- The need for the use of a distributed network-centric control system for a group of attack UAVs to ensure autonomous actions, without the participation of operators at the final stage of the flight mission, which has not been done in existing works, has been justified.
- The proposed RSU in the work can be used in the design of new attack UAVs, and the algorithms underlying it can be implemented in modern mainframe computers.
- To achieve maximum efficiency (coordination) of the actions of groups of attack UAVs in the RSU, a procedure for identifying working UAVs is required, which consists in transmitting individual identification codes and current UAV coordinates at a specified time interval. This requires each UAV to have on board equipment for receiving and transmitting encrypted individual codes and pre-flight synchronization of the time systems of the UAV group.
- To assess the effectiveness of group actions, a new integral indicator is proposed that takes into account the importance of the targets and the probabilities of their defeat, which has not been used in existing works.
References
- Verba V. S., Merkulov V. I. Aviatsionnye sistemy radioupravleniia [Aviation radio control systems]. Moscow, Radiotekhnika Publ., 2014. 376 p. (in Russian).
- Verba V. S. Aviatsionnye kompleksy radiolokatsionnogo dozora i navedeniia. Printsipy postroeniia, problemy razrabotki i osobennosti funktsionirovaniia [Aviation complexes of the radar watch and guidance. Principles of construction, problems of development and features of functioning]. Moscow, Radiotekhnika Publ., 2014. 528 p. (in Russian).
- Smirnov S. V. The Analysis of Ways and Means to Control the Aircrafts from AWACS. Systems of Control, Communication and Security, 2017, no. 2, pp. 69 - 10 (in Russian).
- Merkulov V. I., Miliakov D. A., Samodov I. O. Optimization algorithm group control drones on a LAN. Izvestiya SFedU. Engineering sciences, 2014, vol. 161, no. 12, pp. 157-166 (in Russian).
- Evdokimenkov V. N., Krasil'shchikov M. N., Sebriakov G. G. Distributed intellectual control system for the group of unmanned aerial vehicles: architecture and software and mathematical support. Izvestiya SFedU. Engineering sciences, 2016, vol. 174, no. 1, pp. 29 - 44 (in Russian).
- Godwin M. F., Spry S. C., Hedrick J. K. A Distributed System for Collaboration and Control of UAV Groups: Experiments and Analysis. Center for the Collaborative Control of Unmanned Vehicles University of California, 2007. 224 p.
- Voina dronov. [War of drones]. Informatsionnyi portal, 05 May 2018. Available at: https://life.ru/t/сирия/1076718/voina_dronov (accessed 05 May 2018) (in Russian).
- Butkovskii A. G. Strukturnaia teoriia raspredelennykh system [Structural theory of distributed systems] Moscow, Nauka Publ., 1977. 320 p. (in Russian).
- Mefedov A. V. Algorithm of optimal target assignment for an autonomous group of attack unmanned aerial vehicles. Informatsiia i Kosmos, 2018, no. 3, pp. 67 - 71 (in Russian).
- Broeder G. G., Ellison G. G., Emerling R. E. On Optimum Target Assignments // Operations Research. 1959. Vol. 7. P. 322 - 326.