


Факультет: электротехнический
Специальность: электропривод и автоматизация промышленных установок
Актуальность темы. На современном этапе развития систем автоматизированного электропривода наиболее часто используемыми являются асинхронные двигатели с короткозамкнутым ротором (АД). Это обусловлено рядом преимуществ, основные из которых:
- простота конструкции, и, следовательно, простота технического обслуживания;
- возможность получения регулировочных характеристик, идентичных характеристикам двигателя постоянного тока;
- возможность получения высоких показателей качества регулирования.
Для реализации таких систем, в их состав кроме АД должно входить преобразовательное устройство с программируемым логическим контроллером (ПЛК). В современных комплектных приводах есть возможность выбора закона управления, в зависимости от технологических требований. Диапазон способов управления довольно широкий – от тиристорного регулятора напряжения до скалярного частотного управления или, при необходимости, векторного управления. При этом, чем проще закон управления, тем меньшим количеством численных значений параметров привода нужно располагать. Поэтому в современных комплектных приводах организуют различные уровни доступа к параметрам. Например, в Micromaster 440 фирмы Siemens таких уровней доступа пять: от нулевого до четвертого. Причем для 0 – простого ввода в эксплуатацию, достаточно знать номинальные данные АД, указанные на шильдике. Для точной настройки при 4 – экспертном уровне, необходимо знать значения всех внутренних параметров АД: активные сопротивления обмоток статора Rs и ротора Rr, индуктивность намагничивания Lm, индуктивность рассеяния σLs и электромеханическая постоянная времени Tm.
Зачастую в ПЛК имеется встроенный алгоритм идентификации параметров АД с последующей самонастройкой регуляторов системы управления. Такая настройка производится единоразово перед пуском привода. Однако вследствие изменения температуры окружающей среды, величины момента статического сопротивления или момента инерции первоначальная настройка регуляторов перестает быть корректной и требует уточнения. Данную функцию призван выполнять параметрический контроль путем проверки соответствия текущих настроек системы управления параметрам объекта (АД) и введения необходимых корректирующих параллельных обратных связей.
Целью магистерской работы является исследование способов параметрического управления асинхронным электроприводом на базе преобразователя частоты Micromaster 440.
Задачи:
- анализ возможностей параметрирования закона управления АД в зависимости от уровня доступа на примере Micromaster 440;
- анализ существующих методов идентификации параметров АД с последующим выбором наиболее простых и точных алгоритмов;
- осуществление динамической коррекции коєффициентов регуляторов в режиме реального времени.
Научная значимость работы на данном этапе исследований состоит в выборе и анализе точности предварительной идентификации параметров АД, анализе возможностей параметрирования Micromaster 440 при различных уровнях доступа.
Обзор исследований по теме в ДонНТУ показал, что вопросы идентификации параметров рассмотрены в [1 – 4]. Так, в [2] рассмотрен метод идентификации электромеханической постоянной времени привода в системах регулирования скорости с наблюдателями состояния, оценивающими статический и динамический моменты двигателя постоянного тока при помощи наблюдателя состояния, в основу которого положена модель механической части привода. С помощью представленной в [1, 2, 4] методик можно с высокой точностью определить численные значения параметров механической части привода, что будет использовано при настройке регулятора скорости. Кроме того проверено, что представленные методики могут использоваться в реальных ПЛК. В [3] дан обзор экспериментальных и теоретических методов идентификации электромагнитных параметров. Однако в данной магистерской работе не представляется возможным реализовать рассмотренные методы, так как часть из них требует специального лабораторного оборудования или сложного математического анализа фазо - частотных характеристик.
Обзор исследований по теме в Украине выявил, что вопросы идентификации параметров рассмотрены в [5 – 10]. В [5, 10] используется методика идентификации на основе формирования питания асинхронного двигателя гармоническими сигналами с дальнейшим анализом их гармонического состава с помощью математического аппарата преобразований Фурье.
В [9] задача идентификации параметров решается решением системы, состоящей из 8 уравнений Парка - Горева, описывающих процессы в асинхронном двигателе в неподвижной системе координат. Программная реализация данного метода представляет научную ценность, но требует применения довольно мощных вычислительных ресурсов. Рассмотренный в работе [9] способ идентификации базируется на использовании уравнений Парка – Горева, что само по себе вносит погрешность, величина которой, в различных условиях может достигать 10%.
Обзор исследований по теме в мире показал, что вопросы идентификации параметров рассмотрены в [11 – 15]. В [11] дано подробное математическое описание и возможные варианты построения эталонных моделей, методы прямой идентификации параметров объекта при наличии возмущающих воздействий. Однако представленная методика оперирует только дискретными моделями. В [12] рассмотрен алгоритм предварительной идентификации параметров асинхронного двигателя и последующая адаптация к изменению постоянной времени ротора. Рассмотренные в работах [12, 15] способы идентификации базируются на использовании различных схем замещения АД, что само по себе вносит некоторую погрешность.
В зависимости от задач управления и уровня подготовки обслуживающего персонала в преобразователе частоты Micromaster 440 фирмы Siemens предусмотрены различные уровни доступа. При этом любой из параметров соответствует конкретному значению уровня доступа. Как пример рассмотрим табл.1.
Таблица 1 - Список параметров
| Номер параметра | Описание параметра | Мин./Макс. ед. измер. | Уровень доступа |
| Р0350 | Сопротивление статора двигателя. Значение сопротивления статора в Ом подключенного двигателя (сопротивление между линейными выводами двигателя). Есть три метода определения значения этого параметра:
|
0,00001 2000 (4) Ом |
2 |
| Р1211 | Количество перезапусков. Определяет количество раз автоматических перезапусков преобразователя. | 0 10 (3) |
3 |
Существующие методы идентификации можно разделить на предварительные и текущие. Для проведения тестовых (предварительных) режимов оценивания параметров может требоваться отсоединение вала АД от рабочего механизма, причем для обеспечения требуемой точности необходимо использовать датчик частоты вращения или положения ротора.
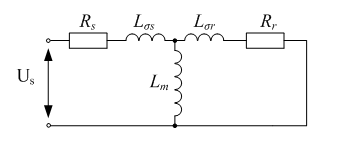
В качестве электромагнитных параметров, подлежащих идентификации, традиционно рассматриваются (рис.1) активные сопротивления обмоток статора Rs и ротора Rr, индуктивность намагничивания Lm, индуктивность рассеяния σLs [12].
Исходными данными являются фазные токи и напряжения, которые в реальном приводе могут быть измерены без применения дополнительных датчиков (Isi, Usi, где і = А, В, С).
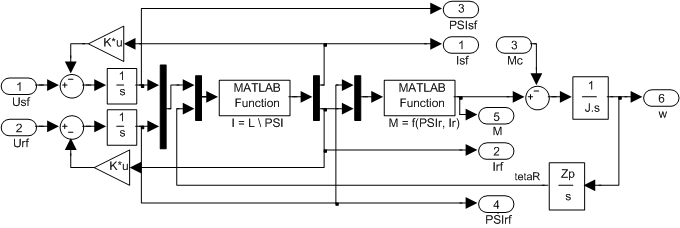
Simulink-модель эксперимента приведена на рис.2, где имитируется формирование с помощью инвертора напряжения с ШИМ необходимых векторолв напряжения и анализируется реакция АД на тестовые сигналы.
В модельном эксперименте использован АД серии МТК-31-8. Его параметры: Pном=7500 Вт, nном=682 об/мин, zp=4.
| Параметр | Rs, Ом | σLs, Гн | Lm, Гн | Rr, Ом |
| Реальный | 0,7880 | 0,0530 | 0,0481 | 1,2960 |
| Идентифицированный | 0,7887 | 0,0520 | 0,0465 | 1,2595 |
| Погрешность, % | 0,009 | 1,9 | 3,3 | 2,8 |
На данном этапе работы опробован алгоритм предварительной идентификации параметров асинхронного двигателя. Ошибка определения любого из параметров менее 5%, следовательно данная методика может успешно применяться для задач параметрического управления.
1 Проведение модельного эксперимента для анализа точности текущей идентификации параметров.
2 Проверка полученных результатов на лабораторном оборудовании.
При написании автореферата магистерская работа не завершена. Оконченный вариант работы и материалы по теме могут быть получены у автора или его руководителя после января 2011 г.
Соколов Н.А. Исследование и разработка наблюдателя состояния с адаптацией к изменению параметров объекта управления [Электронный ресурс] / Портал магистров ДонНТУ, - http://www.masters.donntu.ru/2009/eltf/sokolov/diss/index.htm
Идентификация электромеханической постоянной времени в системах с наблюдателями состояния, восстанавливающими статический момент / О.И. Толочко, П.Х. Коцегуб, П.И. Розкаряка, Г.С. Чекавский // Тематический выпуск «Проблемы автоматизированного электропривода. Теория и практика» научно-технического журнала «ЭЛЕКТРОИНФОРМ» – Львов: ЕКОинформ, 2009. – С. 59–62.
Рогозин Г.Г. Визначення електромагнітних параметрів машин змінного струму: нові експериментальні методи. – К.: Техніка, 1992. – 168 с. Мова рос.
Трандафілов В.М., Толочко О.І., Божко В.В. Особливості градієнтного метода ідентифікації моменту інерції електроприводу / В.М. Трандафілов, О.І. Толочко, В.В. Божко // Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць X Міжнародної науково-технічної конференції аспірантів та студентів в м. Донецьку 18-20 травня 2010 р. – Донецьк, 2010. – С. 260-262.
Использование псевдополигармонических сигналов в задачах идентификации параметров двигателей переменного тока/ Родькин Д.И. // Тематический выпуск «Проблемы автоматизированного электропривода. Теория и практика» научно-технического журнала «ЭЛЕКТРОИНФОРМ» – Львов: ЕКОинформ, 2009. – С. 29–39.
Бешта А.С., Куваев Ю.В., Желдак Т.А., Макуха Ю.Н., Балахонцев А.В. Определение параметров схемы замещения асинхронного двигателя с короткозамкнутым ротором по переходному процессу в обмотке статора //Научные труды КрГПИ «Проблемы создания новых машин и технологий». Кременчуг. - 2000. - №1(8). - С. 157 – 161.
Бешта А.С., Балахонцев А.В., Худой Е.Г. Идентификация координат асинхронного двигателя в условиях дрейфа активных сопротивлений. // Науковий журнал Запорізького національного технічного університету «Електротехніка та електроенергетика», Вип. 2. Запоріжжя – 2005. С.59-64.
Робастный алгоритм идентификации параметров асинхронного двигателя при неподвижном роторе/ Пересада С.М., Ковбаса С.Н., Малько М.П.// Вісник Кременчуцького державного університету імені Михайла Остроградського №3/2010 (62). С.
Півняк Г.Г., Волков А.В. Сучасні частотно-регульовані асинхронні електроприводи з широтно – імпульсною модуляцією: Монографія. – Дніпропетровськ: Національний гірничий університет, 2006. – 470 с. Рос. мовою
Мирсаитов К.М. Метод идентификации параметров ротора асинхронного двигателя на ходу/ Вісник СевДТУ. Вип. 88: Механіка, енергетика, екологія: зб. наук. пр. - Севастополь: Вид-во СевНТУ, 2008.
Изерман Р. Цифровые системы управления. – М.: Мир, 1984. – 541 с.
Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина».- Иваново, 2008.- 298 с.
Официальный сайт компании Siemens в России. Предоставлена разнообразная информация о продукции и проектных решениях компании. [Электронный ресурс], - http://www.siemens.com/answers/ru/ru/
Ljung L. System Identification - Theory For the User, 2nd ed / Lennart Ljung – PTR Prentice Hall, Upper Saddle River, N.J., 1999. – 609 pp.
Klaes, Norbert. Identifikationsverfahren für die betriebspunktabhängigen Parameter einer wechselrichtergespeisten Induktionsmaschine. Düsseldorf, 1992. – 100 pp.