


Факультет: електротехнічний
Спеціальність: електропривід і автоматизація промислових установок
Актуальність теми. На сучасному етапі розвитку систем автоматизованого електроприводу найбільш часто використовуваними є асинхронні двигуни з короткозамкненим ротором (АД). Це зумовлено низкою переваг, основні з яких:
- простота конструкції, і, отже, простота технічного обслуговування;
- можливість отримання регулювальних характеристик, ідентичних характеристиками двигуна постійного струму;
- можливість отримання високих показників якості регулювання.
Для реалізації таких систем, в їх склад окрім АД повинний входити перетворювальний пристрій з програмованим логічним контролером (ПЛК).
У сучасних комплектних приводах є можливість вибору закону управління, в залежності від технологічних вимог. Діапазон способів управління досить широкий - від тиристорного регулятора напруги до скалярного частотного управління або, при необхідності, векторного керування. При цьому, чим простіше закон управління, тим меншою кількістю чисельних значень параметрів привода потрібно розраховувати. Тому в сучасних комплектних приводах організують різні рівні доступу до параметрів. Наприклад, в Micromaster 440 фірми Siemens таких рівнів доступу п'ять: від нульового до четвертого. Причому для 0 - простого введення в експлуатацію, досить знати номінальні дані АД, вказані на шильдику. Для точної настройки при 4 - експертному рівні, необхідно знати значення всіх внутрішніх параметрів АД: активні опори обмоток статора Rs і ротора Rr, індуктивність намагнічування Lm, індуктивність розсіювання σLs і електромеханічну постійну часу Tm.
Найчастіше в ПЛК є вбудований алгоритм ідентифікації параметрів АД з наступним самонастроюванням регуляторів системи управління. Така настройка проводиться одноразово перед пуском приводу. Проте внаслідок зміни температури навколишнього середовища, величини моменту статичного опору або моменту інерції первісне настройки регуляторів перестає бути коректним і вимагає уточнення. Дану функцію покликаний виконувати параметричний контроль шляхом перевірки відповідності поточних параметрів системи управління параметрам об'єкту (АД) і введення необхідних коригуючих паралельних зворотних зв'язків.
Метою магістерської роботи є дослідження способів параметричного управління асинхронним електроприводом на базі перетворювача частоти Micromaster 440.
Завдання:
- аналіз можливостей параметрування закону управління АД в залежності від рівня доступу, наприклад, Micromaster 440;
- аналіз існуючих методів ідентифікації параметрів АД з подальшим вибором найбільш простих і точних алгоритмів;
- здійснення динамічної корекції коєффіціентов регуляторів в режимі реального часу.
Наукова значущість роботи на даному етапі досліджень полягає у виборі та аналізі точності попередньої ідентифікації параметрів АД, аналізі можливостей параметрування Micromaster 440 при різних рівнях доступу.
Огляд досліджень по темі в ДонНТУ показав, що питання ідентифікації параметрів розглянуті в [1 - 4]. Так, в [2] розглянуто метод ідентифікації електромеханічної сталої часу приводу в системах регулювання швидкості з спостерігачами стану, оцінюють статичний і динамічний моменти двигуна постійного струму за допомогою спостерігача стану, в основу якого покладено модель механічної частини приводу. За допомогою представленої в [1, 2, 4] методик можна з високою точністю визначити чисельні значення параметрів механічної частини приводу, що буде використано при настройці регулятора швидкості. Крім того підтверджено, що представлені методики можуть використовуватися в реальних ПЛК. У [3] даний огляд експериментальних і теоретичних методів ідентифікації електромагнітних параметрів. Однак у даній магістерській роботі не представляється можливим реалізувати розглянуті методи, так як частина з них вимагає спеціального лабораторного устаткування або складного математичного аналізу фазо - частотних характеристик.
Огляд досліджень по темі в Україні виявив, що питання ідентифікації параметрів розглянуті в [5 - 10]. В [5, 10] використовується методика ідентифікації на основі формування живлення асинхронного двигуна гармонійними сигналами з подальшим аналізом їх гармонійного складу за допомогою математичного апарату перетворень Фур'є.
В [9] задача ідентифікації параметрів вирішується рішенням системи, що складається з 8 рівнянь Парка – Горєва, які описують процеси в АД у нерухомій системі координат. Програмна реалізація даного метода складає наукову цінність, але потребує застосування потужних обчислювальних ресурсів. Розглянутий у роботі [9] спосіб ідентифікації базується на використанні рівнянь Парка – Горєва, що вносить похибку, яка при різних умовах складатиме до 10%.
Огляд досліджень по темі у світі показав, що питання ідентифікації параметрів розглянуті в [11 - 15]. В [11] дано докладний математичний опис та можливі варіанти побудови еталонних моделей, методи прямої ідентифікації параметрів об'єкта при наявності збурюючих впливів. Однак представлена методика оперує тільки дискретними моделями. У [12] розглянуто алгоритм попередньої ідентифікації параметрів асинхронного двигуна і подальша адаптація до зміни постійної часу ротора.
Розглянуті в роботах [12, 15] способи ідентифікації базуються на використанні різних схем заміщення АД, що саме по собі вносить деяку похибку.
Залежно від завдань управління та рівня підготовки обслуговуючого персоналу в перетворювачі частоти Micromaster 440 фірми Siemens передбачені різні рівні доступу. При цьому будь-який з параметрів відповідає конкретному значенню рівня доступу. Як приклад розглянемо табл.1:
Таблиця 1 - Список параметрів
| Номер параметра | Опис параметра | Мін./Макс. од. вимір. | Рівень доступу |
| Р0350 | Опір статора двигуна. Значення опору статора в Ом підімкненого двигуна (опір між лінійними виводами двигуна). Є три метода визначення величини цього параметра:
|
0,00001 2000 (4) Ом |
2 |
| Р1211 | Кількість перезапусків. Визначає кількість разів автоматичних перезапусків перетворювача. | 0 10 (3) |
3 |
Існуючі методи ідентифікації можна розділити на попередні і поточні. Для проведення тестових (попередніх) режимів оцінювання параметрів може потребуватися від'єднання валу АД від робочого механізму, причому для забезпечення завданої точності необхідно використовувати датчик частоти обертання або положення ротора.
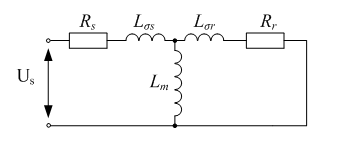
В якості електромагнітних параметрів, що підлягають ідентифікації, традиційно розглядаються (рис.1) активні опори обмоток статора Rs і ротора Rr, індуктивність намагнічування Lm, індуктивність розсіювання σLs [11].
Вихідними даними є фазні струми та напруги, які в реальному приводі можуть бути виміряні без застосування додаткових датчиків (Isi, Usi, де і = А, В, С).
Simulink-модель експерименту наведена на рис.2, де імітується формування за допомогою інвертора напруги з ШІМ необхідних векторів напруги та аналізується реакція АД на тестові сигнали.
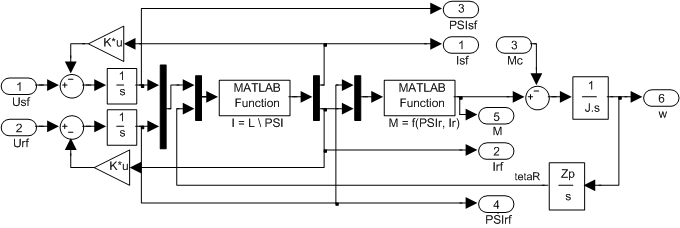
В модельному експерименті застосований АД серії МТК-31-8. Його параметри: Pном=7500 Вт, nном=682 об/хв, zp=4.
| Параметр | Rs, Ом | σLs, Гн | Lm, Гн | Rr, Ом |
| Реальний | 0,7880 | 0,0530 | 0,0481 | 1,2960 |
| Идентифікований | 0,7887 | 0,0520 | 0,0465 | 1,2595 |
| Похибка, % | 0,009 | 1,9 | 3,3 | 2,8 |
На даному етапі роботи випробуваний алгоритм попередньої ідентифікації параметрів асинхронного двигуна. Помилка визначення будь-якого з параметрів менше 5%, отже дана методика може успішно застосовуватися для задач параметричного управління.
1 Проведення модельного експерименту для аналізу точності поточної ідентифікації параметрів.
2 Перевірка отриманих результатів на лабораторному обладнанні.
При написанні автореферату магістерська робота не завершена. Закінчений варіант роботи та матеріали по темі можуть бути отримані у автора або його керівника після січня 2011 р.
Соколов Н.А. Исследование и разработка наблюдателя состояния с адаптацией к изменению параметров объекта управления [Электронный ресурс] / Портал магистров ДонНТУ, - http://www.masters.donntu.ru/2009/eltf/sokolov/diss/index.htm
Идентификация электромеханической постоянной времени в системах с наблюдателями состояния, восстанавливающими статический момент / О.И. Толочко, П.Х. Коцегуб, П.И. Розкаряка, Г.С. Чекавский // Тематический выпуск «Проблемы автоматизированного электропривода. Теория и практика» научно-технического журнала «ЭЛЕКТРОИНФОРМ» – Львов: ЕКОинформ, 2009. – С. 59–62.
Рогозин Г.Г. Визначення електромагнітних параметрів машин змінного струму: нові експериментальні методи. – К.: Техніка, 1992. – 168 с. Мова рос.
Трандафілов В.М., Толочко О.І., Божко В.В. Особливості градієнтного метода ідентифікації моменту інерції електроприводу / В.М. Трандафілов, О.І. Толочко, В.В. Божко // Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць X Міжнародної науково-технічної конференції аспірантів та студентів в м. Донецьку 18-20 травня 2010 р. – Донецьк, 2010. – С. 260-262.
Использование псевдополигармонических сигналов в задачах идентификации параметров двигателей переменного тока/ Родькин Д.И. // Тематический выпуск «Проблемы автоматизированного электропривода. Теория и практика» научно-технического журнала «ЭЛЕКТРОИНФОРМ» – Львов: ЕКОинформ, 2009. – С. 29–39.
Бешта А.С., Куваев Ю.В., Желдак Т.А., Макуха Ю.Н., Балахонцев А.В. Определение параметров схемы замещения асинхронного двигателя с короткозамкнутым ротором по переходному процессу в обмотке статора //Научные труды КрГПИ «Проблемы создания новых машин и технологий». Кременчуг. - 2000. - №1(8). - С. 157 – 161.
Бешта А.С., Балахонцев А.В., Худой Е.Г. Идентификация координат асинхронного двигателя в условиях дрейфа активных сопротивлений. // Науковий журнал Запорізького національного технічного університету «Електротехніка та електроенергетика», Вип. 2. Запоріжжя – 2005. С.59-64.
Робастный алгоритм идентификации параметров асинхронного двигателя при неподвижном роторе/ Пересада С.М., Ковбаса С.Н., Малько М.П.// Вісник Кременчуцького державного університету імені Михайла Остроградського №3/2010 (62). С.
Півняк Г.Г., Волков А.В. Сучасні частотно-регульовані асинхронні електроприводи з широтно – імпульсною модуляцією: Монографія. – Дніпропетровськ: Національний гірничий університет, 2006. – 470 с. Рос. мовою
Мирсаитов К.М. Метод идентификации параметров ротора асинхронного двигателя на ходу/ Вісник СевДТУ. Вип. 88: Механіка, енергетика, екологія: зб. наук. пр. - Севастополь: Вид-во СевНТУ, 2008.
Изерман Р. Цифровые системы управления. – М.: Мир, 1984. – 541 с.
Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина».- Иваново, 2008.- 298 с.
Официальный сайт компании Siemens в России. Предоставлена разнообразная информация о продукции и проектных решениях компании. [Электронный ресурс], - http://www.siemens.com/answers/ru/ru/
Ljung L. System Identification - Theory For the User, 2nd ed / Lennart Ljung – PTR Prentice Hall, Upper Saddle River, N.J., 1999. – 609 pp.
Klaes, Norbert. Identifikationsverfahren für die betriebspunktabhängigen Parameter einer wechselrichtergespeisten Induktionsmaschine. Düsseldorf, 1992. – 100 pp.