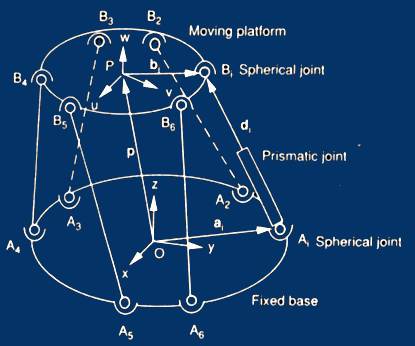
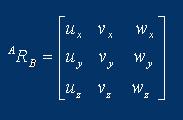
Задача управления параллельным манипулятором состоит с том, чтобы перемещать подвижную платформу манипулятора – рабочий орган – согласно заданной траектории. Перемещение платформы осуществляется при помощи шести соединений (ног) механизма. В нашем случае имеется заданное положение и ориентация подвижной платформы, относительно базы. Для модели платформы входными переменными будут шесть сил, воздействующие на ноги, а выходными – длины и скорости ног.
Традиционный метод проектирования регуляторов для САУ параллельных манипуляторов требует использования сложных дифференциальных уравнений, отображающих механические компоненты механизма. Затем необходимо решать эти уравнения, что является непростой задачей. Этого можно избежать, используя программное обеспечение, моделирующее механические объекты. Для моделирования механической части будет использоваться MATLAB/ SimMechanics, а для моделирования регулятора – Simulink.
Для начала необходимо создать механическую модель параллельного манипулятора. Механическая часть манипулятора состоит из неподвижной платформы – базы, подвижной платформы и шести соединений (ног), соединяющие эти платформы. Ноги состоят из двух тел, соединенных цилиндрическими соединениями. Верхняя и нижняя части каждой ноги (в дельнейшем будем называть их верхняя и нижняя нога) прикрепляются к платформам карданными соединениями.
Для имитации неподвижной платформы используется блок Ground. Этот блок соединяется с блоком карданного соединения, которому с другой стороны прикрепляется блок, имитирующий механическое тело. Таким образом, получается нижняя нога. Аналогичным образом получаем верхнюю ногу, однако прикрепляем ее к подвижной платформе. Затем при помощи цилиндрического соединения объединяются обе ноги. Для моделирования движения ноги используется блок Joint Actuator, на вход которого подается сформированный управляющий сигнал от регулятора. При помощи блока Joint Sensor измеряется скорость и положение ноги.
Все элементы модели ноги объединяются в один блок, т.е. формируется подсистема. Теперь можно собирать в SimMechanics механическую модель всего параллельного манипулятора:
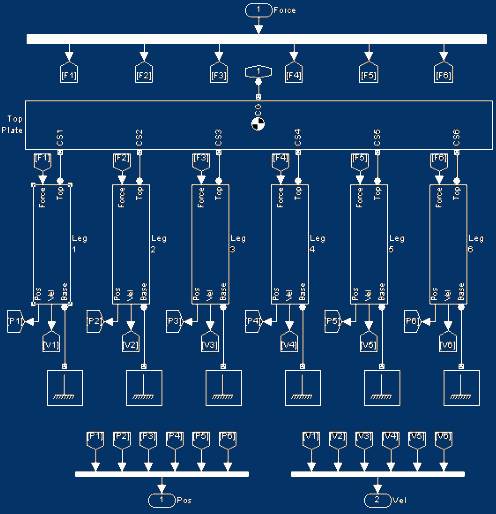
Рассмотрим эту модель. Управляющее воздействие, формируемое регулятором, подается на демультиплексор, имеющий шесть выходов. Сигналы с этих выходов являются входными сигналами для блоков Joint Actuator каждой ноги. Все шесть ног воздействуют на подвижную платформу – блок Top Plate. Подсистема каждой ноги имеет два выходных сигнала: положение и скорость. Они являются сигналами обратной связи для регулятора. Таким образом, мы получили модель параллельного манипулятора. Данная модель также оформляется в виде подсистемы.
Главным назначением регулятора в системе управления параллельным манипулятором является определение траектории подвижной платформы при переводе ее в заданное положение. Эта траектория затем преобразовывается в желаемые траектории ног, используя обратный кинематический анализ. Наконец, регулятор формирует задающее воздействие для каждой ноги, чтобы следовать желаемой траектории.
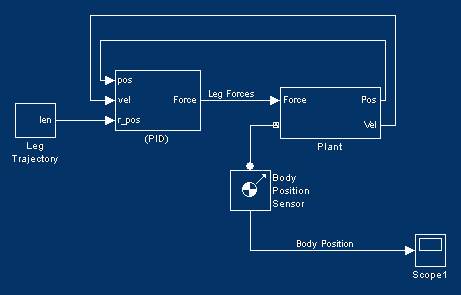
В качестве регулятора возьмем ПИД- регулятор. Его входами являются текущие положение и скорость, а также желаемое положение ног.
Cобираем модель системы управления и объекта управления из полученных подсистем. Эта системе изображена на следующем рисунке:
Параллельные манипуляторы имеют следующие преимущества перед последовательными: более высокая жесткость системы, лучшая грузоподъемность и меньшая инерция. К недостаткам параллельных роботов следует отнести меньшее рабочее пространство по сравнению с последовательными и более сложную конструкцию механизма.
Однако наряду с указанными преимуществами МПКС по сравнению с классическими роботами имеют худшее соотношение рабочего пространства и габаритов самого робота, а также, зачастую, очень ограниченные углы поворота рабочего органа. Кроме того, в процессе работы манипулятора возникают так называемые «особые положения», в которых соединения манипулятора могут пересекаться, что может привести к выходу из строя аппарата. Поэтому, система управления такого манипулятора должна не только обеспечивать требования по быстродействию, перерегулированию и т.п., но и избегать особых положений.
Область применения механизмов с параллельными кинематическими связями очень широка: современные многокоординатные фрезерные и сверлильные станки, симуляторы летательных аппаратов, регулируемые шарнирные фермы, машины для шахт, самописцы т.д. Масштабируемость МПКС позволяет легко строить на их основе крупногабаритные станки. Высокие скорости и большие ускорения МПКС привлекательны для создания различных промышленных роботов или платформ, например, для телескопов, лазеров, телекоммуникационных антенн или реактивных двигателей.
Список источников
вверх
| 1. |
Lung-Wen Tsai. Robot Analysis: The mechanics of serial and parallel manipulators.– New York: John
Wiley&Sons Inc., 1999. – 505С. |
| 2. |
"Geometric Analysis of Parallel Mechanisms"; Ilian Bonev.
Интернет-источник . |
| 3. |
"Robust Adaptive Control of a Hexaglide Type Parallel Manipulator"; John Phil Kim, Sung-Gaun Kim, Jeha Ryu.
Интернет-источник . |
| 4. |
Скляренко Е.Г. "Оптимизация конструкции механизма с параллельными кинематическими связями и шестью степенями свободы." |
| 5. |
"Simulink 4. Специальный справочник" В.Дьяконов- Санкт-Петербург, 2002. – 517С. |
| 6. |
http://www.parallemic.org |
| 7. |
http://www.mathworks.com |