| Индивидуальный раздел | Главная | Реферат | Библиотека | Ссылки | Отчет о поиске |

Казаков Олег Владимирович
Факультет компьютерных информационных
технологий и автоматики
Кафедра электронной техники
Специальность: Электронные системы
Руководитель: доцент, к.т.н. Винниченко Н.Г.
Тема магистерской работы: Обоснование и исследование структурной
схемы электронной системы
контроля натяжения канатов шахтных
подъемных установок
Реферат по теме магистерской работыАктуальность темыАктуальность создания электронной системы, которая отслеживала бы равномерность натяжения канатов, обусловлена требованиями пункта 4.12.22 НПАОП 10.0-1.01-05 «Правил безопасности в угольных шахтах» о необходимости контроля относительной перегрузки канатов шахтной многоканатной подъемной установки [1]. При эксплуатации многоканатных подъёмных установок (рис. 1) часто происходит разбаланс канатов вследствие разной степени их удлинения. При этом нагрузка на канаты распределяется неравномерно, и те из канатов, удлинение которых больше, подвержены действию большей части нагрузки. Это приводит к неравномерному износу футеровки шкивов подъемных установок, перегрузке отдельных канатов, особенно при движении сосуда на этапе ускорения или торможения. Создаются предпосылки для аварийной ситуации, сопровождающейся обрывом и падением подъемных сосудов, разрушением стволов, а на людских подъемах – травмированием и гибелью людей.
Рисунок 1 – Схематичное изображение шахтной подъемной установки Кроме того, контроль натяжений канатов необходимо осуществлять, чтобы устранить рассогласование первоначальных длин канатов в навеске. Так, если по истечении нескольких суток после навески канатов окажется, что измеренные каким-либо способом натяжения имеют большие разбеги, то это явно свидетельствует о рассогласовании длин канатов. В таком случае, ни о какой стабилизации усилий не может идти речи, а требуется элементарная (хотя и трудоемкая) операция перепанцировки канатов с целью выравнивания их длин. Таким образом, измерение усилий в канатах является необходимой технологической процедурой. Эта проблема является не простой, и она, по сути дела, не соответствует современным требованиям эксплуатации подъемных установок. Цель и задачи работыЦелью данной работы является исследование удлинения канатов и обоснование структуры электронной системы контроля натяжения канатов шахтных многоканатных подъемных установок. Задачи работы:
Новизна работыНовизна работы заключается в том, что впервые была уточнена математическая модель каната как винтовой цилиндрической пружины. На её основе проведены исследования удлинения наиболее часто встречающихся на шахтах типов канатов в зависимости от величины нагрузки и особенностей канатов (конструкции, диаметра каната, площади поперечного сечения). Кроме того, обоснована и построена структура электронной системы, контролирующей натяжение канатов многоканатных шахтных подъемных установок. Впервые проведено моделирование работы электронной системы контроля натяжения канатов в пакете LabView, выявлены достоинства такой системы и указаны рекомендации по её усовершенствованию. Выбор метода решенияОсновными критериями при выборе такого метода являются: быстродействие, точность измерений, надёжность работы в различных климатических условиях и во всем допустимом диапазоне нагрузки канатов, обеспечение взрывобезопасности применяемых техническихсредств, длительность работы от автономных источников питания. В СССР в начале 60-х годов для измерения натяжений в канатах был создан прибор (разработка МакНИИ), основанный на измерении частоты поперечных колебаний каната ограниченной длины, которая (частота) непосредственно связана с натяжением. Однако из-за сильно выраженного дисперсионного характера таких колебаний идентификация численных значений усилий приводила к неоднозначным результатам, из-за чего прибор не нашел практического применения [2]. Самым простым и доступным способом измерения натяжений является так называемый волновой, предложенный в конце 50-х годов шведскими инженерами (теперь этот способ иногда так и называют – шведским) [2]. Суть этого способа состоит в следующем. Пусть вертикально висящий массивный канат длиной L и погонной массой q=qГ в нижней точке растянут силой Р. Считается, что нижняя точка в поперечном направлении не перемещается. В окрестности подвеса верхнего конца каким-либо способом возбуждается поперечная волна в канате (нечто подобное солитону – уединенной волне), которая, отразившись от неподвижной концевой массы, спустя некоторое время Δt, возвращается в исходную точку, в которой возбуждалась волна, и воспринимается специальным прибором. Оказывается, что величина Р непосредственно связана с величиной Δt, следовательно, по ее измеренному значению можно определить натяжение каната Р в нижнем сечении. В случае достаточно длинных канатов (L > 600 м) изложенный способ определения усилий дает удовлетворительные результаты при использовании обычного секундомера с возбуждением и приемом отраженного сигнала при помощи руки. Недостатками такого способа измерения натяжения является необходимость использования человека в качестве приемника отраженного сигнала и невысокая точность измерений обычным секундомером. Для контроля натяжения канатов проходческих лебедок используются ограничители натяжения канатов ОНК-1М.У1 (в 80-х годах XX ст. выпускался институтом ВНИИОМШС г. Харьков [3], в настоящее время – компанией «Сибтензоприбор» г. Новосибирск [4]). В приборе ОНК - 1М.У1 (рис. 2) осуществляется преобразование усилия натяжения канатов в пропорциональный электрический сигнал и индикация этого усилия на пульте управления. Для преобразования величины натяжения каната в пропорциональное ему и меньшее по величине измеряемое усилие использована плавно регулируемая рычажно-роликовая система, состоящая из трех роликов, между которыми контролируемый канат располагается с небольшим перегибом на среднем ролике, и двух кулис, передающих усилие с роликов на датчик и установленных на корпусе преобразователя, а также плавно перемещаемой каретки с закрепленным на ней средним роликом. Для преобразования механических усилий в электрический сигнал применен тензорезисторный силоизмерительный датчик. Сигнал с датчика преобразовывается в напряжение постоянного тока величиной до 6В усилителем, установленным в корпусе датчика. Если усиленный сигнал с датчика больше напряжения, заданного переключателем "МАЛО", и меньше напряжения, заданного переключателем "МНОГО", то лебедка работает нормально. Если сигнал выходит за пределы указанного диапазона, то лебедка останавливается[5].
Рисунок 2 – Ограничитель натяжения канатов проходческих лебёдок ОНК-1М.У1 Недостатком данного ограничителя является необходимость перегиба каната, а также использование рычажно-роликовой системы, постоянство точности работы которой при действии продолжительных динамических нагрузок при движении каната обеспечить достаточно сложно. Также к недостаткам можно отнести: ограниченные диапазоны диаметров контролируемых канатов и пределов контролируемых нагрузок; невысокую точность установления предела перенапряжения (погрешность составляет 10% от номинальной нагрузки ограничителя); относительно быстрый механический износ рычажно-роликовой системы. В НИИГМ им. М. М. Федорова разработан комплекс технических средств, обеспечивающих безопасную эксплуатацию шахтных подъемных установок КТС БПУ. Комплекс предназначен для контроля натяжения канатов, защиты от провисания и напуска, контроля срабатывания парашютных устройств, контроля местоположения клети в стволе, защиты от жесткой посадки клети, передачи и представления информации машинисту подъема [6]. Датчик натяжения данного комплекса, размещаемый на канате над подвесным устройством подъемного сосуда, осуществлял контроль нагрузки на канат по величине удлинения каната. Во время эксплуатации датчик показал невысокую надёжность работы и практически осуществлял только контроль напуска каната (вертикальность положения каната). Таким образом, на данный момент в Украине не создано автоматизированных систем, обеспечивающих надежный контроль натяжения канатов шахтных подъемных установок. За рубежом некоторые фирмы используют для этих целей встроенные в подвесные устройства тензометрические, магнитоупругие датчики, силоизмерительные месдозы и др., однако из-за сложности передачи полученной информации на поверхность и удорожания подъемной установки такие средства пока не нашли широкого применения [2]. В связи с указанными недостатками существующих методов контроля натяжения, предлагается продолжить работы по совершенствованию технических средств, использующих метод контроля нагрузки на канат по величине удлинения последнего. Данный метод обладает такими преимущества над перечисленными выше методами:
Структурная схема и анимацияСтруктурная схема электронной системы, реализующей контроль натяжения канатов многоканатной шахтной подъемной установки выбранным методом, приведена на рис. 3. 
Рисунок 3 – Структурная схема электронной системы контроля натяжения канатов Структурная схема содержит датчики линейных перемещений (ДЛП), предварительные усилители (ПУ), устанавливаемые на каждом из канатов, блок передачи информации и блок приема и отображения информации. Система с помощью мультиплексора аналоговых сигналов (МАС) периодически опрашивает каждый из датчиков, сигналы с выходов которых подаются на аналогово-цифровой преобразователь (АЦП), где преобразуются в цифровую форму. Далее цифровые сигналы поступают на передатчик (Пер.), с которого по каналу связи передаются в приемник (Прием.). Управляет опросом датчиков и работой блока передачи информации микропроцессор (МП). С выхода приёмника сигнал о величине натяжения каждого каната поступает в накопитель информации (Память), где эта информация сохраняется. Микропроцессор (МП) блока приема и отображения информации анализирует эти данные, и в случае перегрузки определенного каната более 15% от среднего значения выдаёт аварийный световой и звуковой сигнал. МП также управляет работой системы, разрешая или запрещая передачу данных с приёмника в накопитель, и обеспечивает вывод информации на индикатор (И). Схематично процесс работы электронной системы, контролирующей натяжение канатов по величине их удлинений, представлен на рис. 4.
Рисунок 4 – Процесс работы электронной системы контроля натяжения канатов РезультатыВ электронной системе используются датчики линейных перемещений, для обоснования параметров и правильного выбора конструктивных типов которых требуется определить ожидаемые величины удлинений. В расчётной схеме (рис. 5) представим каждый слой в виде винтовой пружины кругового поперечного сечения диаметром d. Предположим, что винтовая пружина кругового поперечного сечения подвергается действию сил Р, направленных по оси, и какой-либо виток лежит в плоскости, мало отличающейся от плоскости, перпендикулярной к оси пружины. Рассматривая равновесие верхней части пружины, ограниченной осевым сечением, например mn (рис. 5), можно заключить из уравнений статики, что усилия по поперечному сечению mn витка приводятся к срезающей силе Р, приложенной в центре тяжести поперечного сечения, и к паре сил, действующей в плоскости поперечного сечения в направлении против хода часовой стрелки [7].
Рисунок 5 – Винтовая цилиндрическая пружина Радиус пружины считается неизменным в процессе её растяжения: Ri = R = const. В работе [7] получено следующее выражение для опускания пружины:
Введём коэффициент взаимосвязи радиуса каната и радиуса пружины k:
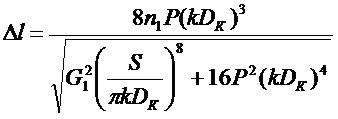
Получаем выражение для расчёта удлинения (Δl) рассматриваемого каната:
На основании установленной зависимости при коэффициенте взаимосвязи радиуса каната и радиуса пружины k = 0,3 получены следующие величины удлинений канатов указанных диаметров (рис. 6).
Рисунок 6 – Удлинение каната ГОСТ 2688 – 80 в зависимости от величины нагрузки и Таким образом, по мере роста нагрузки на канат наблюдается увеличение величины удлинения каната. В качестве минимальной нагрузки рассматривался вес ненагруженного подъемного сосуда, поэтому величины удлинений в данном случае минимальны. По мере уменьшения диаметра каната, уменьшается площадь сечения проволок, что приводит к увеличению удлинения каната. Более детальное уточнение математической модели натяжения каната представлено в статье «Уточнение метода контроля натяжения канатов шахтной подъемной установки». На основании структурной схемы электронной системы и уточненной модели удлинения каната в программе LabView промоделирована работа системы контроля. Предложенная виртуальная модель позволяет производить ввод исходных данных, регулировку, подстройку, а также можно добиться необходимой точности контроля натяжения канатов. Кроме того, модель позволяет в первом приближении отслеживать динамику распределения нагрузки между канатами путём контроля натяжения каждого из канатов с выводом данной информации на графики. ЗаключениеВ ходе выполнения квалификационной работы магистра обоснована необходимость создания электронной системы контроля натяжения канатов шахтных многоканатных подъемных установок, поскольку данная технологическая процедура не соответствует современным требованиям эксплуатации подъемных установок. Проанализированы существующие методы контроля натяжения канатов. Как наиболее оптимальный выбран метод контроля натяжения канатов по величине удлинения последних. Уточнена математическая модель каната как винтовой цилиндрической пружины. На примере каната ГОСТ 2688 – 80 установлены величины ожидаемых удлинений в зависимости от величины нагрузки и конструктивных особенностей каната. Синтезирована структурная схема электронной системы контроля натяжения канатов и в первом приближении промоделирована работа системы в пакете LabView. Далее планируется продолжить исследования удлинений наиболее распространенных в угольных шахтах типов канатов в зависимости от их конструктивных особенностей. Также необходимо провести уточнение виртуальной модели и исследовать работу системы с учётом динамики движения подъемного сосуда. Литература
|