| Індивідуальний розділ | Головна | Реферат | Бібліотека | Посилання | Пошук |

Казаков Олег Володимирович
Факультет комп'ютерних інформаційних
технологій та автоматики
Кафедра електронної техники
Спеціальність: Електронні системи
Керівник: доцент, к.т.н. Винниченко М.Г.
Тема магістерської роботи: Обґрунтування та дослідження структурної
схеми електронної системи контролю натягу канатів шахтних підйомних
установок
Реферат за темою магістерської роботиАктуальність темиАктуальність створення електронної системи, яка відстежуватиме рівномірність натягу канатів, обумовлена вимогами пункту 4.12.22 НПАОП 10.0-1.01-05 «Правил безпеки у вугільних шахтах» про необхідність контролю відносного перевантаження канатів шахтної багатоканатної підйомної установки [1]. Під час експлуатації багатоканатних підйомних установок (рис. 1) часто відбувається розбаланс канатів внаслідок різного ступеня їх подовження. При цьому навантаження на канати розподіляється нерівномірно. Це призводить до нерівномірного зносу футеровки шківов підйомних установок, перевантаження окремих канатів, особливо при русі судини на етапі прискорення або гальмування. Створюються передумови для аварійної ситуації, що супроводжується обривом і падінням підйомних судин, руйнуванням стволів, а на людських підйомах – травмуванням та загибеллю людей.
Рисунок 1 – Схематичне зображення шахтної підйомної установки Крім того, контроль натягів канатів необхідно здійснювати, щоб усунути неузгодженість первинних довжин канатів у навішуванні. Так, якщо після закінчення декількох діб після навішування канатів виявиться, що виміряні будь-який способом натяги мають великі розбіги, то це явно свідчить про розузгодження довжин канатів. У такому випадку, ні про яку стабілізацію зусиль не може йти мови, а потрібна елементарна (хоча й трудомістка) операція перепанцировки канатів з метою вирівнювання їх довжин. Таким чином, вимірювання зусиль у канатах є необхідною технологічною процедурою. Ця проблема є не простою, і вона, по суті справи, не відповідає сучасним вимогам експлуатації підйомних установок. Мета та завдання роботиМетою даної роботи є дослідження подовження канатів і обгрунтування структури електронної системи контролю натягу канатів шахтних багатоканатних підйомних установок. Завдання роботи:
Новизна роботиНовизна роботи полягає в тому, що вперше була уточнена математична модель каната як гвинтової циліндричної пружини. На її основі проведено дослідження подовження канатів таких типів, що найчастіше використовуються на шахтах, в залежності від величини навантаження та особливостей канатів (конструкції, діаметра каната, площі поперечного перерізу). Крім того, обгрунтована і побудована структура електронної системи, яка контролює натяг канатів багатоканатних шахтних підйомних установок. Вперше проведено моделювання роботи електронної системи контролю натягу канатів в пакеті LabView, виявлені позитивні якості такої системи та зазначені рекомендації щодо її удосконалення. Вибір методу розв'язанняОсновними критеріями при виборі такого методу є: швидкодія, точність вимірювань, надійність роботи в різних кліматичних умовах і в усьому припустимому діапазоні навантаження канатів, забезпечення вибухобезпеки застосовуваних технічних засобів, тривалість роботи від автономних джерел живлення. У СРСР на початку 60-х років для вимірювання натягів у канатах був створений прилад (розробка МакНДІ), заснований на вимірюванні частоти поперечних коливань каната обмеженої довжини, яка (частота) безпосередньо пов'язана з натягом. Однак через сильно виражений дисперсійний характер таких коливань ідентифікація чисельних значень зусиль приводила до неоднозначних результатів, через що прилад не знайшов практичного застосування [2]. Найбільш простим і доступним способом вимірювання натягів є так званий хвильовий, запропонований наприкінці 50-х років шведськими інженерами (тепер цей спосіб іноді так і називають - шведським) [2]. Суть цього способу полягає в наступному. Нехай вертикально висить масивний канат довжиною L і погонною масою q=qГ в нижній точці розтягнутий силою Р. Вважається, що нижня точка в поперечному напрямку не рухається. Поблизу підвісу верхнього кінця будь-яким способом викликається поперечна хвиля в канаті (щось подібне солітону - відокремленій хвилі), яка, відбившись від нерухомої кінцевий маси, через деякий час Δt, повертається до вихідної точки, в якій збуджувалася хвиля, і сприймається спеціальним приладом. Виявляється, що величина Р безпосередньо пов'язана з величиною Δt, отже, за її виміряним значенням можна визначити натяг каната Р в нижньому перерізі. У випадку досить довгих канатів (L > 600 м)викладений спосіб визначення зусиль дає задовільні результати при використанні звичайного секундоміра з збудженням і прийомом відбитого сигналу за допомогою руки. Недоліками такого способу вимірювання натягу є необхідність використання людини як приймача відбитого сигналу і невисока точність вимірювань звичайним секундоміром. Для контролю натягу канатів прохідницьких лебідок використовуються обмежувачі натягу канатів ОНК-1М.У1 (у 80-х роках XX ст. випускалися інститутом ВНІІОМШС м. Харків [3], в даний час - компанією «Сибтензоприбор» м. Новосибірськ [4]). У приладі ОНК - 1М.У1 (рис. 2) здійснюється перетворення зусилля натягу канатів в пропорційний електричний сигнал і індикація цього зусилля на пульті управління. Для перетворення величини натягу каната в пропорційне йому та менше за величиною виміряне зусилля використана плавно регульована важільно-роликова система, що складається з трьох роликів, між якими контрольований канат розташовується з невеликим перегином на середньому ролику, і двох лаштунків, що передають зусилля з роликів на датчик і встановлені на корпусі перетворювача, а також каретки, що плавно переміщується, із закріпленим на ній середнім роликом. Для перетворення механічних зусиль в електричний сигнал застосований тензорезисторний силовимірювальний датчик. Сигнал з датчика перетворюється в напругу постійного струму величиною до 6В підсилювачем, встановленим в корпусі датчика. Якщо посилений сигнал з датчика більше напруги, заданого перемикачем "МАЛО", і менше напруги, заданого перемикачем "БАГАТО", то лебідка працює нормально. Якщо сигнал виходить за межі вказаного діапазону, то лебідка зупиняється [5].
Рисунок 2 – Обмежувач натягу канатів прохідницьких лебідок ОНК-1М.У1 Недоліком цього обмежувача є необхідність перегину каната, а також використання важільно-роликової системи, сталість точності роботи якої при дії тривалих динамічних навантажень при русі каната забезпечити досить складно. Також до недоліків можна віднести: обмежені діапазони діаметрів контрольованих канатів і меж контрольованих навантажень; невисоку точність встановлення межі перенапруги (похибка становить 10% від номінального навантаження обмежувача); відносно швидкий механічний знос важільно- роликової системи. У НДІГМ ім. М.М. Федорова розроблено комплекс технічних засобів для безпечної експлуатації шахтних підйомних установок КТЗ БПУ. Комплекс призначений для контролю натягу канатів, захисту від провисання і напуску, контролю спрацьовування парашутних пристроїв, контролю місця розташування кліті в стовбурі, захисту від жорсткої посадки кліті, передачі та представлення інформації машиністу підйому [6]. Датчик натягу даного комплексу, що розміщується на канаті над підвісним пристроєм підйомної судини, здійснював контроль навантаження на канат за величиною подовження каната. Під час експлуатації датчик показав невисоку надійність роботи й практично здійснював тільки контроль напуску каната (вертикальність положення канату). Таким чином, на даний момент в Україні не створено автоматизованих систем, що забезпечують надійний контроль натягу канатів шахтних підйомних установок. За кордоном деякі фірми використовують для цих цілей вбудовані в підвісні пристрої тензометричні, магнітопружних датчики, силовимірювальні месдози та ін., однак через складність передачі отриманої інформації на поверхню та подорожчання підйомної установки такі засоби поки не знайшли широкого застосування [2]. У зв'язку із зазначеними недоліками існуючих методів контролю натягу, пропонується продовжити роботи з удосконалення технічних засобів,що використовують метод контролю навантаження на канат за величиною подовження останнього. Даний метод обладає такими перевагами над перерахованими вище методами:
Структурна схема та анімаціяСтруктурна схема електронної системи, що реалізує контроль натягу канатів багатоканатної шахтної підйомної установки обраним методом, наведена на рис. 3. 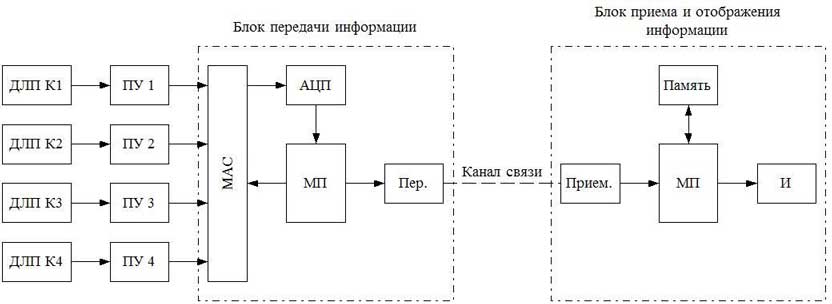
Рисунок 3 – Структурна схема електронної системи контролю натягу канатів Структурна схема містить датчики лінійних переміщень (ДЛП), попередні підсилювачі (ПП), що встановлюються на кожному з канатів, блок передачі інформації та блок прийому та відображення інформації. Система за допомогою мультиплексора аналогових сигналів (МАС) періодично опитує кожен з датчиків, сигнали з виходів яких подаються на аналогово-цифровий перетворювач (АЦП), де перетворюються в цифрову форму. Далі цифрові сигнали надходять на передавач (Пер.), з якого по каналу зв'язку передаються в приймач (Прийм.). Керує опитуванням датчиків і роботою блоку передачі інформації мікропроцесор (МП). Із виходу приймача сигнал про величину натягу кожного каната надходить у накопичувач інформації (Пам'ять), де ця інформація зберігається. Мікропроцесор (МП) блоку прийому та відображення інформації аналізує ці дані, і в разі перевантаження певного каната більше 15% від середнього значення видає аварійний світловий і звуковий сигнал. МП також керує роботою системи, дозволяючи або забороняючи передачу даних з приймача в накопичувач, і забезпечує виведення інформації на індикатор (І). Схематично процес роботи електронної системи, яка контролює натяг канатів за величиною їх подовжень, представлений на рис. 4.
Рисунок 4 – Процес роботи електронної системи контролю натягу канатів РезультатиВ електронній системі використовуються датчики лінійних переміщень, для обґрунтування параметрів і правильного вибору конструктивних типів яких потрібно визначити очікувані величини подовжень. У розрахунковій схемі (рис. 5) представимо кожен шар у вигляді гвинтової пружини кругового поперечного перерізу діаметром d. Припустимо, що гвинтова пружина кругового поперечного перерізу піддається дії сил Р, спрямованих по осі, і який-небудь виток лежить у площині, що мало відрізняється від площини, перпендикулярної до осі пружини. Розглядаючи рівновагу верхньої частини пружини, обмеженою осьовим перерізом, наприклад mn (рис. 5), можна укласти з рівнянь статики, що зусилля по поперечному перерізу mn ввитка приводяться до зрізаючого силі Р, прикладеної в центрі ваги поперечного перерізу, та до пари сил, що діють в площині поперечного перерізу в напрямку проти ходу годинникової стрілки [7].
Рисунок 5 - Гвинтова циліндрична пружина Радіус пружини вважається незмінним у процесі її розтягування: Ri = R = const. У роботі [7] отримано наступний вираз для опускання пружини:
Введемо коефіцієнт взаємозв'язку радіусу каната і радіусу пружини k:
Отримуємо вираз для розрахунку подовження (Δl) розглянутого каната:
На підставі встановленої залежності при коефіцієнті взаємозв'язку радіусу каната та радіусу пружини k = 0,3 отримані наступні величини подовжень канатів зазначених діаметрів (рис. 6).
Рисунок 6 – Подовження каната ГОСТ 2688 – 80 в залежності від величини навантаження та Таким чином, по мірі зростання навантаження на канат спостерігається збільшення величини подовження каната. В якості мінімального навантаження розглядалося вага ненавантаженого підйомного судини, тому величини подовжень в даному випадку мінімальні. При зменшенні діаметра каната, зменшується площа перетину дротів, що призводить до збільшення подовження каната. Більш детальне уточнення математичної моделі подовження канатів наведено у статті «Уточнення методу контролю натягу канатів шахтної підйомної установки». На підставі структурної схеми електронної системи йі уточненої моделі подовження каната в програмі LabView промодельована робота системи контролю. Запропонована віртуальна модель дозволяє робити введення початкових даних, регулювання, підстроювання, а також можна отримати необхідну точність контролю натягу канатів. Крім того, модель дозволяє в першому наближенні відслідковувати динаміку розподілу навантаження між канатами шляхом контролю натягу кожного з канатів з виведенням даної інформації на графіки. ВисновкиУ ході виконання кваліфікаційної роботи магістра обгрунтована необхідність створення електронної системи контролю натягу канатів шахтних багатоканатних підйомних установок, оскільки дана технологічна процедура не відповідає сучасним вимогам експлуатації підйомних установок. Проаналізовано існуючі методи контролю натягу канатів. Як найбільш оптимальний обрано метод контролю натягу канатів за величиною подовження останніх. Уточнено математична модель каната як гвинтової циліндричної пружини. На прикладі каната ГОСТ 2688 – 80 встановлені величини очікуваних подовжень в залежності від величини навантаження та конструктивних особливостей каната. Синтезовано структурну схему електронної системи контролю натягу канатів і в першому наближенні промодельована робота системи в пакеті LabView. Далі планується продовжити дослідження подовжень найбільш поширених у вугільних шахтах типів канатів в залежності від їх конструктивних особливостей. Також необхідно провести уточнення віртуальної моделі та дослідження роботи системи з урахуванням динаміки руху підйомного судини. Література
|