



Mourovannyi Igor
- Faculté électrotechnique
- Chaire « Commande électrique et l'automatisation des installations industrielles »
- Spécialité « Les systèmes électromécaniques de l'automatisation et la commande électrique »
- Développement des outils d'enregistrement des processus transitoires dynamiques dans les systèmes de la commande électrique
- Chef scientifique: Chekavskyy Glib
- Сonsultant: Khomenko Vyatcheslav
Abstrait
La partie principale
Les capteurs de courant
Les capteurs de tension
Définition de caractère des signaux mesurés
Le choix de convertisseur analogique-numerique
La liste de références
Introduction
Les étudiants considèrent souvent la notion de « processus transitoire » par l'étude des disciplines spécifiques de la specialité « Electromécanique ». Ils recherchent fréquemment aussi les caracteristiques d'un système de la commande électrique « en dynamique ». Dans industrie quand on développent la système de la commande électrique on presente les exigences principales à ses caracteristiques dynamiques.
Evidemment, que les processus transitoires sont un des aspects importants d’étude de la commande électrique. On fait l’analyse des processus transitoires avec objectifs des études ou bien objectifs des recherches scientifiques. Mais, la possibilité de voir les processus transitoires « en vie » est limité en conditions des laboratoires de l’université, et, par consequence, les connaissences des étudiants d’une des sections principales de leur specialité est terminé par la théorie, alors que la pratique n'a pas commencé. C’est pourquoi développement des outils d'enregistrement des processus transitoires dynamiques dans les systèmes de la commande électriques est la problème actuelle. Les outils qui seront développés permettent de visualiser les processus transitoires avec la précision suffisante. En outre, les étudiants obtiennent la possibilité de confirmer les connaissences obtenus en pratique.
L’objectif de tavail est l’obtention des valeurs numériques des grandeurs mesurés avec leurs traitement suivant sur l’ordinateur. On comprend dans la cadre de traitement suivant la filtration du signal ( si on a la nécessité ), la séparation de la première harmonique du signal, le calcul des coordonnées inconnues, l’obtention des graphiques des processus transitoires. Par exemple, si on a les valeurs des courants et des tensions d’un moteur asynchrone, en utilisant les methodiques connues il faut calculer les valeurs des flux et des couples.
Pour réaliser de cet objectif il faut résoudre le problème de développement des outils d'enregistrement, qui satisfera les exigences suivantes : l’outils d'enregistrement doit enregistrer les coordonnées avec le temps d'échantillonnage petit, y compris le travail en regime en-ligne avec traitement suivant sur l’ordinateur ; l’outils d'enregistrement doit se caracterise par une compacité, la mobilité, l'universalité par rapport àux signaux mesurés par l’amplitude et par le type de courant.
La partie principale
On peut presenter en vue général un canal d'enregistrement comme l’on illustre sur la figure 1.
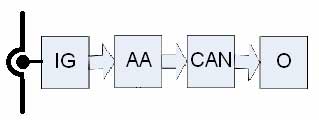
Figure 1 — Bloc diagramme d'un canal d'enregistrement
Sur la figure 1 on a presenté : IG – l’isolation galvanique ; AA – l’amplificateur d’accordance ; CAN – convertisseur analogique-numerique ; O – ordinateur.
On peut réaliser le bloc de l’isolation galvanique et de l’amplificateur d’accordance en utilisant les capteurs actuels de courant, de tension, de vitesse etc. Assurément, on fait l'accent principal à l'enregistrement sur les courants et les tensions. C’est en raison de possibilité de calculer les coordonnées inconnues d’un moteur asynchrone en utilisant les valeurs des courants et des tensions, et aussi en raison de presence des génératrices tachymétriques qui convertissent la vitesse à la tension et qui sont ensemble avec les moteur de courant continu, qu’on utilise dans les laboratoires de l’université.
Les capteurs de courant
On a choisi les capteurs LA 55-P de LEM pour réaliser une isolation galvanique. Le courant primaire nominal de ces capteurs est 50 A. Cette valeur est suffisante pour l'enregistrement des courants des moteurs des laboratoires de l’université.
Les capteurs sont montés sur les circuits imprimés (deux capteurs au circuit imprimé ). On a tout les contacts nécessaires dans les circuits imprimés pour la tention d’alimentation et pour les signaux de sortie. L’apparence des capteurs est presenté sur la figure 2.

Figure 2 — L’apparence des capteurs de courant
Les capteurs de tension
On a développé le circuit imprimé des diviseurs de tension pour diminuer la tension du moteur à niveau qui est acceptable pour les convertisseurs analogique-numerique. L’apparence des diviseurs de tension est presenté sur la figure 3.

Figure 3 — L’apparence des diviseurs de tension
Le rapport de tension de sortie à tension d’entrée est 0.025 pour les diviseurs de tension. Ce permet d’obtenir la tension de sortie 9.2 V à la tension d’entrée 380 V. Mais le diviseur de tension ne fournit pas l’isolation galvanique entre le circuit primaire et le circuit secondaire, c’est pourquoi on ne peut pas applique la tension de sortie du diviseur de tension à convertisseur analogique-numerique. On a utilise le bloc des isolations galvaniques GISA – 01С pour isoler le canal d’enregistrement et le circuit primaire. en outre du circuit imprimé des diviseurs de tension, on a utilise aussi les capteurs de tension à effet Hall LV 25-P de LEM.
Définition de caractère des signaux mesurés
On a été réalisé l’enregistrement préalable des signaux qui vont enregistrer à l’objectif de définitions de caractère des signaux mesurés, et aussi de définition des paramètres nécessaires de convertisseur analogique-numerique. L’enregistrement a été réalisé à l’aide d’enregistreur industriel des signaux « РЕКОН-08МС » à les installations expérimentales de laboratoire des systèmes des commande électrique de la chaire « Le commande électrique et l’automatisation des installations industrielles ».
Le choix de convertisseur analogique-numerique
L’enregistrement préalable a révélé que convertisseur analogique-numerique doit avoir le temps d'échantillon d’un canal prés de 20 kHz à l’enregistrement des signaux de moteur à courant alternatif et le temps d'échantillon d’un canal prés de 1 kHz à l’enregistrement des signaux de moteur à courant continu. La gamme des tension d’entrée doit être ±10 V. L’analyse de marché a révélé que le mycrosystème d’acquisition des données m-DAQ de HOLIT Data Systems corresponde à ces exigences.
Remarque importante
Le travail de magistère n’est pas terminé au moment de rédaction final de cet abstrait. La réalisation définitive du travail aura lieu en décembre 2011. On planifie réaliser l’enregistrement des signaux des systèmes differents de commande électrique à l’aide du mycrosystème d’acquisition des données m-DAQ. On envisage aussi réaliser l’enregistrement des signaux mêmes à l’aide de convertisseur analogique-numerique National Instruments 6023E et faire une analyse comparatif de ces deux dispositifs.
La liste de références
- Калинов А.П., Гладырь А.И. Универсальное учебно-исследовательское оборудование для электромеханических лабораторий // Електротехнічні і енергозберігаючі системи. Науково-виробничий журнал. Випуск 1/2007 (1). — Кременчук. — С. 14—19.
- Данилов А. Современные промышленные датчики тока / Андрей Данилов // Современная электроника. — 2004. № 10. — С. 26—35.
- Фрайден Дж. Современные датчики. Справочник / Дж. Фрайден; пер. с англ. Ю.А.Заболотная. — Москва: Техносфера, 2005. — 592 с.
- Калинов А.П. Учебно-исследовательское оборудование на базе универсальных модулей АЦП / А.П.Калинов, Д.Г.Мамчур, А.И.Гладырь // ПиКАД. — 2008. № 4. — С. 42—45.
- Чекмарев А. Датчики тока и напряжения ABB — от печатной платы до преобразователей-гигантов / Алексей Чекмарев // Силовая электроника. — 2006. № 3.
- Инструкция по эксплуатации многоканального регистратора электрических сигналов «РЕКОН-08МС» (версия 7.24). — Донецк: «РЕКОН», 2002. — 34 с.
- SAMI MINISTAR Frequency Converter. Technical Information. — ABB Drives, 1991. — 32 p.
- БТУ-3601. Техническое описание и инструкция по эксплуатации, 1982. — 46 с.
- Micromaster 440. Руководство по эксплуатации. Документация пользователя. Издание А1. — Siemens AG 2007. — 140 с.
- Dorin O. Neacsu. Space vector modulation — an introduction / IECON'01: The 27th Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2001.
- Литвин Н.А. Инновационные подходы к организации практикума по основам технологии сбора данных и программированию / А.Н.Литвин, Е.Ю.Хохлова, А.М.Литвин // ПиКАД. — 2009. № 1. — С. 18—22.