



Мурованный Игорь Юрьевич
- Электротехнический факультет
- Кафедра «Электропривод и автоматизация промышленных установок»
- Специальность «Электромеханические системы автоматизации и электропривод»
- «Разработка средств регистрации динамических переходных процессов в системах электропривода»
- Научный руководитель: к.т.н., доц. Чекавский Глеб Станиславович
- Консультант: асс. Хоменко Вячеслав Николаевич
Реферат по теме магистерской работы
Основная часть
Датчики тока
Датчики напряжения
Определение характера измеряемых сигналов
Выбор аналогово-цифрового преобразователя
Перечень ссылок
Введение
Изучая специальные дисциплины по направлению «Электромеханика», студенты часто сталкиваются с понятием «переходные процессы». Нередко также они исследуют поведение той или иной системы электропривода «в динамике». На производстве при проектировании системы электропривода основные требования предъявляются к её динамическим характеристикам, т.е., к качеству переходных процессов.
Становится понятно, что переходные процессы — один из важнейших аспектов изучения электропривода. Анализ переходных процессов может выполняться как с учебной, так и с научно-исследовательской целью. Однако, в условиях лабораторных аудиторий университета увидеть переходные процессы в электроприводе «вживую» ограничена, и, как следствие, знание студентами одного из основных разделов специальности заканчивается теорией, до практики так и не дойдя. В свете этого, разработка средств регистрации переходных процессов в системах электропривода становится достаточно актуальной задачей. Разработанные средства позволят с достаточной точностью визуализировать переходные процессы. Кроме того, студенты получат возможность подтвердить полученные знания на практике.
Целью работы является получение численных значений измеренных величин с дальнейшей их обработкой на компьютере. Под дальнейшей обработкой подразумевается фильтрация сигнала (если необходимо), выделение первых гармоник сигналов, расчет неизвестных координат, построение графиков переходных процессов. Например, по полученным значениям токов и напряжений асинхронного двигателя используя известные методики рассчитать значения потокосцепления и момента.
Для достижения этой цели необходимо решить задачу разработки регистрирующего средства, которое удовлетворяло бы следующим требованиям: регистрирующее средство должно проводить регистрацию координат с достаточно малым периодом дискретности, в том числе в режиме on-line с последующей обработкой данных с помощью компьютерных программ; регистрирующее средство должно характеризоваться компактностью, мобильностью (с целью простого переноса его с одного лабораторного стенда на другой), универсальностью по отношению к измеряемым сигналам, как по амплитуде, так и по роду тока.
Обзор исследований по теме в Украине показал, что наиболее активно работы по разработке средств регистрации переходных процессов в системах электропривода, а именно работы по созданию измерительно-диагностических комплексов, ведутся сотрудниками кафедры САУЭ Кременчугского государственного политехнического университета имени Михаила Остроградского [1].
Основная часть
В самом обобщенном виде один канал регистрации можно представить, как показано на рисунке 1.

Рисунок 1 — Структурная схема канала регистрации электромагнитной координаты
На рисунке 1 обозначено: ГР — блок гальванических развязок, СУ — согласующий усилитель; АЦП — аналогово-цифровой преобразователь, ПК — персональный компьютер.
Последовательность регистрации показана на рисунке 2:
Рисунок 2 — Последовательность регистрации
Реализовать блок гальванической развязки и согласующего усилителя возможно, используя современные датчики тока, напряжения, скорости и др. Основной упор при регистрации делается, конечно, на токи и напряжения. Это объясняется тем, что в асинхронном двигателе по известным значениям токов и напряжений можно рассчитать остальные координаты, а в большинстве двигателей постоянного тока, используемых в лабораториях, установлены тахогенераторы, преобразующие скорость в напряжение.
Датчики тока
Существует множество методов измерения тока, однако в промышленности наиболее широко применяются три: резистивный (с использованием шунта), на основе эффекта Холла и трансформатора тока [2].
Резистивные датчики тока вносят потери в цепь измерения. Кроме того, они не обеспечивают гальваническую развязку между силовой цепью и цепью измерения. Трансформаторы тока могут быть использованы только в цепях переменного тока. Датчики на основе трансформаторов тока нечувствительны к знаку тока, что исключает возможность корректной регистрации тока при реверсе двигателя. Наиболее приемлемым вариантом является использование датчиков тока на основе эффекта Холла. Такие датчики имеют ряд преимуществ, а именно: линейность выходной характеристики, наличие гальванической развязки между первичной и вторичной цепью, широкий диапазон частот измеряемых токов.
Обычно в конструкцию датчика тока на основе эффекта Холла входят магнитопровод, датчик Холла, установленный в зазоре магнитопровода, и усилитель выходного сигнала.
Эффект Холла основан на взаимодействии между движущимися носителями электрического заряда и внешним магнитным полем [3]. Магнитопровод охвачен шиной с измеряемым током. Датчик Холла пронизывает магнитный поток, пропорциональный измеряемому току (рис.3).
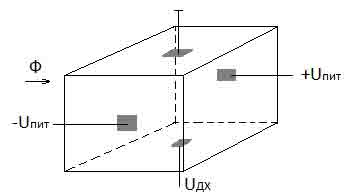
Рисунок 3 — Датчик Холла
К двум противоположным сторонам датчика Холла приложено стабилизированное напряжение питания Uпит. С двух других сторон снимается выходное напряжение Uдх, пропорциональное потоку, и, следовательно, измеряемому току.
Среди датчиков тока на основе эффекта Холла, представленных на нашем рынке, можно выделить датчики производства фирм Allegro MicroSystems и LEM как наиболее приемлемые для учебных целей, исходя из соотношения цена/качество. Однако датчики производства Allegro MicroSystems имеют существенные значения нелинейности и общей погрешности выходного сигнала [4]. Поэтому для реализации гальванической развязки выбраны датчики LA 55-P производства фирмы LEM. Номинальный измеряемый ток для данных датчиков составляет 50 А, что вполне достаточно для измерения тока в двигателях, установленных в лабораториях университета.
Датчики смонтированы на печатные платы (по два на плату). На платах имеются все необходимые выводы для подачи напряжения питания и для выходного сигнала. Внешний вид датчиков показан на рисунке 4.

Рисунок 4 — Внешний вид датчиков тока
Датчики напряжения
Для понижения напряжения до уровня, приемлемого для плат аналогово-цифровых преобразователей, была разработана плата делителей напряжения (рис. 5). Отношение выходного напряжения ко входному для делителя составляет 0,025. Это позволяет при 380 В на входе получить 9,2 В на выходе. Но делитель напряжения не обеспечивает гальваническую развязку между силовой цепью и цепью измерения, поэтому подать выходное напряжение делителя напрямую на вход аналогово-цифрового преобразователя нельзя. Для того, чтобы гальванически развязать канал измерения от силовой цепи, используется блок гальванических развязок GISA — 01С.

Рисунок 5 — Внешний вид платы делителей напряжения
Кроме платы делителей используются также датчики напряжения на основе эффекта Холла LV 25-P производства фирмы LEM, рассчитанные на напряжение 10—500 В. Принцип работы датчика напряжения на основе эффекта Холла состоит в следующем: в первичную цепь датчика включен резистор (рис.6). При непосредственном приложении напряжения к входным контактам датчика ток резистора трансформируется во вторичный ток, пропорциональный первичному напряжению [5].
Рисунок 6 — Принципиальная схема датчика напряжения
Определение характера измеряемых сигналов
С целью установления характера измеряемых сигналов, а также с целью определения необходимых параметров аналогово-цифрового преобразователя была проведена предварительная регистрация сигналов, подлежащих дальнейшим измерениям и обработке. Регистрация проводилась с помощью промышленного регистратора сигналов «РЕКОН-08МС» [6] на экспериментальных стендах лаборатории систем управления электроприводами кафедры «Электропривод и автоматизация промышленных установок». Так, регистрировались токи и напряжения в следующих стендах:
- стенд по исследованию систем скалярного частотного управления асинхронным двигателем на базе преобразователя частоты SAMI Ministar [7];
- стенд по исследованию систем регулирования скорости по схеме «управляемый тиристорный выпрямитель — двигатель» (на базе комплектного электропривода БТУ-3601 [8]);
- стенд по исследованию регулировочных свойств и алгоритмов управления асинхронным электроприводом на базе преобразователя частоты Micromaster 440 [9].
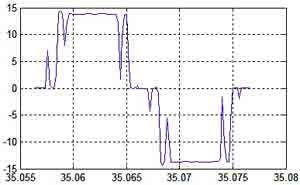
При исследовании сигналов системы скалярного частотного управления регистрировались сигналы в асинхронном двигателе АИМ 71В4 (мощностью 0,75 кВт), питающегося от преобразователя частоты SAMI Ministar. Посредством платы делителей выполнялась регистрация одного линейного напряжения двигателя, формируемого с помощью широтно-импульсной модуляции частотой 4 кГц. Регистрация выполнялась при двух частотах дискретизации «РЕКОН-08МС» — 5 кГц (рис.7а) и 20 кГц (рис.7б). С помощью датчика тока LEM LA 55-P был зарегистрирован ток одной фазы статора при частоте дискретизации «РЕКОН-08МС» 5 кГц. Полученные графики напряжения показаны на рисунке 7(а,б), график тока — на рисунке 8. Установленная в преобразователе частота питающего напряжения — 50 Гц.
а) б)
Рисунок 7 — Результаты регистрации линейного напряжения статора асинхронного двигателя
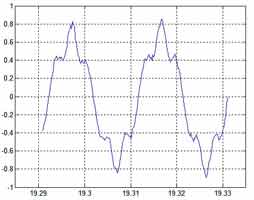
Рисунок 8 — Результаты регистрации тока одной фазы статора асинхронного двигателя
Анализируя графики напряжений, полученных при разных частотах дискретизации регистратора, можно сделать вывод, что частоты дискретизации 5 кГц для регистрации линейных напряжений недостаточно, так как часть сигнала пропадает, что видно из рисунка 7б. Однако объем внутренней оперативной памяти «РЕКОН-08МС» не позволяет записать достаточно длительный процесс при частоте дискретизации 20 кГц, что делает его непригодным для регистрации продолжительных переходных процессов в электроприводе, несмотря на простоту в использовании и наличие гальванической развязки.
Анализируя график тока (рис. 8), становится понятно, что для использования полученных значений для расчета неизвестных координат необходимо выделять первую гармонику тока, и, возможно, фильтровать сигнал.
При исследовании сигналов системы регулирования скорости по схеме «управляемый тиристорный выпрямитель — двигатель» (на базе комплектного электропривода БТУ-3601) выполнялась регистрация тока якоря приводного двигателя ПБСТ-32 (мощностью 0,8 кВт) с помощью ячейки ЯФУ 0145 и скорости приводного двигателя с помощью тахогенератора постоянного тока, резистивного делителя напряжения и ячейки гальванической развязки ЯФУ 0153. Используемая частота дискретизации «РЕКОН-08МС» — 1 кГц. Результаты регистрации указанных сигналов при отработке электроприводом трапецеидальной тахограммы скорости приведены на рисунке 9 (обозначено: I — ток якоря; w — скорость; wz — сигнал задатчика интенсивности).
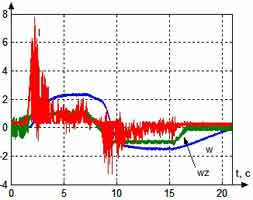
Рисунок 9 — Переходные процессы в электроприводе постоянного тока
Из рисунка 9 видно, что при использовании ячейки ЯФУ 0145 зарегистрированный сигнал тока является зашумленным, что вносит дополнительные погрешности в регистрацию.
При регистрации сигналов в системе «преобразователь частоты — асинхронный двигатель» для исследования регулировочных свойств и алгоритмов управления асинхронным электроприводом были зарегистрированы сигналы в асинхронном двигателе А02-51-2-У3 (мощностью 10 кВт), питающемся от преобразователя частоты Micromaster 440. Аналогичными для преобразователя SAMI Ministar методами была проведена регистрация одного линейного напряжения и тока одной фазы статора. Были зарегистрированы напряжения разной частоты, получаемые различными методами широтно-импульсной модуляции — векторная широтно-импульсная модуляция (Space Vector Modulation, SVM [10]) и асимметричная векторная широтно-импульсная модуляция (Asymmetric space vector modulation, ASVM). Также для SVM был зарегистрирован ток фазы статора частотой 50 Гц. Закон управления, выбранный в преобразователе, — линейное U/f регулирование, т.е., U/f=const. Регистрация проводилась при частоте дискретизации «РЕКОН-08МС» 20 кГц. Результаты регистрации представлены ниже.
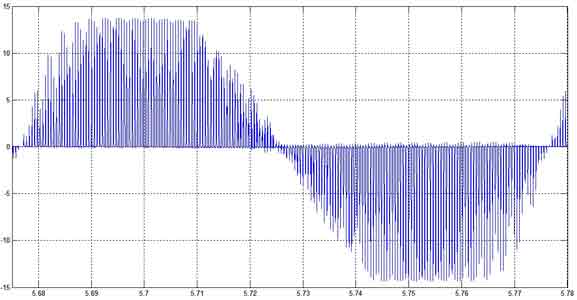
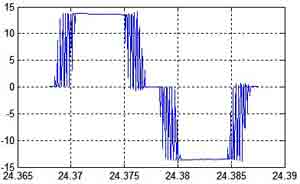
Рисунок 10 — Напряжение частотой 10 Гц, полученное с помощью ASVM частотой 2 кГц
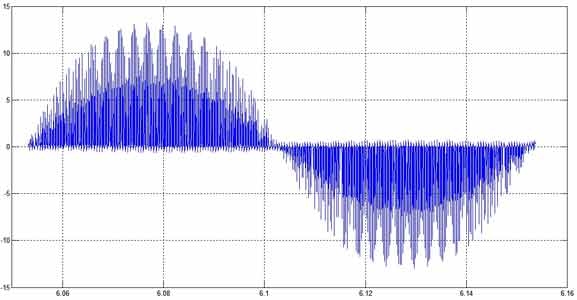
Рисунок 11 — Напряжение частотой 10 Гц, полученное с помощью SVM частотой 2 кГц
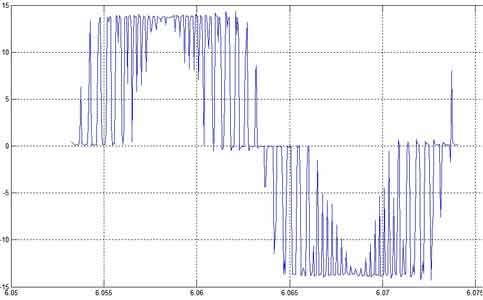
Рисунок 12 — Напряжение частотой 50 Гц, полученное с помощью SVM частотой 2 кГц
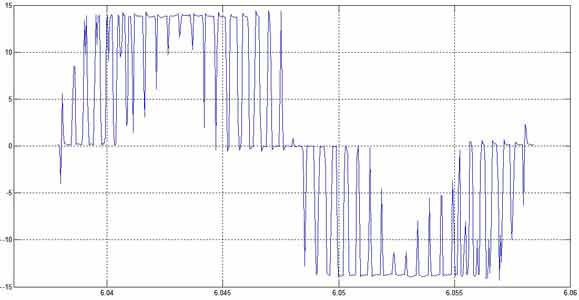
Рисунок 13 — Напряжение частотой 50 Гц, полученное с помощью ASVM частотой 2 кГц
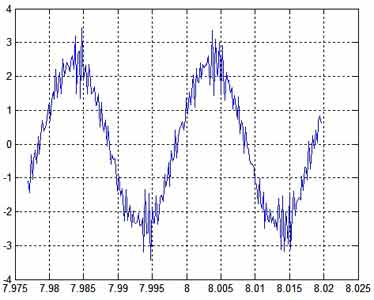
Рисунок 14 — Ток частотой 50 Гц
Как и в случае с SAMI Ministar, полученный ток необходимо фильтровать. Анализ графиков напряжения показывает, что величина напряжения не меняется с изменением частоты, несмотря на то, что используется закон управления U/f=const. Это объясняется тем, что заданное соотношение (U/f=const) поддерживается для первой гармоники напряжения, а методами широтно-импульсной модуляции первая гармоника формируется длительностью импульсов напряжения и их скважностью.
Выбор аналогово-цифрового преобразователя
Предварительная регистрация сигналов с целью определения их характера, а также с целью определения необходимых параметров аналогово-цифрового преобразователя показала, что преобразователь должен обеспечивать частоту дискретизации одного канала не менее 20 кГц при регистрации сигналов в электроприводе переменного тока, и не менее 1 кГц — в приводе постоянного тока. Диапазон входных напряжений преобразователя должен составлять примерно ±10 В, ориентируясь на датчики тока и напряжения. Анализ представленной на рынке продукции показал, что этим требованиям отвечает микросистема сбора данных с интерфейсом USB m-DAQ производства компании «ХОЛИТ Дейта Системс». Микросистема сбора данных m-DAQ широко используется в образовательных целях во многих учебных заведениях [11]. Это объясняется, во-первых, простотой в эксплуатации, во-вторых, относительно низкой стоимостью.
Данное устройство имеет 8 аналоговых входов с диапазоном входных напряжений ±10 В. Общая частота дискретизации аналогово-цифрового преобразователя составляет 100 кГц. Учитывая тот факт, что имеется возможность устанавливать частоту дискретизации для каждого канала отдельно, заявленной суммарной частоты достаточно для регистрации переходных процессов в приводах и постоянного, и переменного тока.
Важное замечание
На момент написания данного реферата магистерская работа еще не окончена. Окончательное завершение работы состоится в декабре 2011 года. В ближайшем будущем планируется провести регистрацию сигналов в различных системах электропривода с помощью микросистемы сбора данных m-DAQ с последующей обработкой данных в среде MATLAB. Также планируется провести регистрацию тех же сигналов с помощью аналогово-цифрового преобразователя National Instruments 6023E и провести сравнительный анализ этих двух устройств.
Перечень ссылок
- Калинов А.П., Гладырь А.И. Универсальное учебно-исследовательское оборудование для электромеханических лабораторий // Електротехнічні і енергозберігаючі системи. Науково-виробничий журнал. Випуск 1/2007 (1). — Кременчук. — С. 14—19.
- Данилов А. Современные промышленные датчики тока / Андрей Данилов // Современная электроника. — 2004. № 10. — С. 26—35.
- Фрайден Дж. Современные датчики. Справочник / Дж. Фрайден; пер. с англ. Ю.А.Заболотная. — Москва: Техносфера, 2005. — 592 с.
- Калинов А.П. Учебно-исследовательское оборудование на базе универсальных модулей АЦП / А.П.Калинов, Д.Г.Мамчур, А.И.Гладырь // ПиКАД. — 2008. № 4. — С. 42—45.
- Чекмарев А. Датчики тока и напряжения ABB — от печатной платы до преобразователей-гигантов / Алексей Чекмарев // Силовая электроника. — 2006. № 3.
- Инструкция по эксплуатации многоканального регистратора электрических сигналов «РЕКОН-08МС» (версия 7.24). — Донецк: «РЕКОН», 2002. — 34 с.
- SAMI MINISTAR Frequency Converter. Technical Information. — ABB Drives, 1991. — 32 p.
- БТУ-3601. Техническое описание и инструкция по эксплуатации, 1982. — 46 с.
- Micromaster 440. Руководство по эксплуатации. Документация пользователя. Издание А1. — Siemens AG 2007. — 140 с.
- Dorin O. Neacsu. Space vector modulation — an introduction / IECON'01: The 27th Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2001.
- Литвин Н.А. Инновационные подходы к организации практикума по основам технологии сбора данных и программированию / А.Н.Литвин, Е.Ю.Хохлова, А.М.Литвин // ПиКАД. — 2009. № 1. — С. 18—22.