



Мурованний Ігор Юрійович
- Електротехнічний факультет
- Кафедра “Електропривод та автоматизація промислових установок”
- Спеціальність “Електромеханічні системи автоматизації та електропривод”
- Розробка засобів реєстрації динамічних перехідних процесів в системах електропривода
- Науковий керівник: к.т.н., доц. Чекавський Гліб Станіславович
- Консультант: ас. Хоменко В'ячеслав Миколайович
Реферат на тему магістерської роботи
Основна частина
Датчики струму
Датчики напруги
Визначення характеру вимірюваних сигналів
Вибір аналогово-цифрового перетворювача
Перелік посилань
Введення
При вивченні спеціальих дисциплін за напрямом “Електромеханіка”, студенти часто стикаються з поняттям “перехідні процеси”. Нерідко також вони досліджують поведінку тієї чи іншої системи електропривода “в динаміці”. На виробництві при проектуванні системи електропривода основні вимоги пред'являються до її динамічним характеристикам, тобто, до якості перехідних процесів.
Стає зрозумілим, що перехідні процеси — один з найважливіших аспектів вивчення електроприводу. Аналіз перехідних процесів може виконуватися як з навчальною, так і з науково-дослідницькою метою. Однак, в умовах лабораторних аудиторій університету побачити перехідні процеси в електроприводі “вживу” обмежена, і, як наслідок, знання студентами одного з основних розділів спеціальності закінчується теорією, до практики так і не дійшовши. Це робить розробку засобів реєстрації перехідних процесів в системах електропривода досить актуальною задачею. Розроблені засоби дозволять з достатньою точністю візуалізувати перехідні процеси. Крім того, студенти отримають можливість підтвердити отримані знання на практиці.
Метою роботи є отримання чисельних значень виміряних величин з подальшою їх обробкою на комп'ютері. Під подальшою обробкою мається на увазі фільтрація сигналу (якщо необхідно), виділення перших гармонік сигналів, розрахунок невідомих координат, побудова графіків перехідних процесів. Наприклад, за отриманими значеннями струмів і напруг асинхронного двигуна при використанні відомих методик розрахувати значення потокозчеплення та моменту.
Для досягнення цієї мети необхідно вирішити задачу розробки засоба реєстрації, який задовольняв би наступним вимогам: засіб реєстрації повинен проводити реєстрацію координат з досить малим періодом дискретності, в тому числі в режимі on-line з подальшою обробкою даних за допомогою комп'ютерних програм; засіб реєстрації повинен характеризуватися компактністю, мобільністю (з метою простого перенесення його з одного лабораторного стенду на інший), універсальністю стосовно до вимірюваних сигналів, як по амплітуді, так і по роду струму.
Огляд дослідженнь за темою в Україні показав, що найбільш активно роботи по розробці засобів реєстрації перехідних процесів у системах електропривода, а саме роботи по створенню вимірювально-діагностичних комплексів, ведуться співробітниками кафедри САУЕ Кременчуцького державного політехнічного університету імені Михайла Остроградського [1].
Основна частина
У самому узагальненому вигляді один канал реєстрації можна представити, як показано на рис.1.
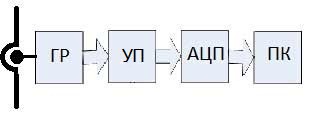
Рисунок 1 — Структурна схема каналу реєстрації електромагнітної координати
На рисунку 1 позначено: ГР — блок гальванічних розв'язок, УП — узгоджувальний підсилювач; АЦП — аналогово-цифровий перетворювач, ПК — персональний комп'ютер.
Послідовність реєстрації показана на рисунку 2:
Рисунок 2 — Послідовність реєстрації
Реалізувати блок гальванічної розв'язки і узгоджувального підсилювача можливо при використанні сучасних датчиків струму, напруги, швидкості та інших. Основний упор при реєстрації робиться, звичайно, на струми і напруги. Це пояснюється тим, що в асинхронному двигуні по відомим значенням струмів і напруг можна розрахувати інші координати, а в більшості двигунів постійного струму, які використовуються в лабораторіях, встановлені тахогенератори, які перетворюють швидкість в напругу.
Датчики струму
Існує багато методів вимірювання струму, проте в промисловості найбільш широко застосовуються три: резистивний (з використанням шунта), на основі ефекту Холла і трансформатора струму [2].
Резистивні датчики струму вносять втрати в ланцюг вимірювання. Крім того, вони не забезпечують гальванічну розв'язку між силовим ланцюгом і ланцюгом вимірювання. Трансформатори струму можуть бути використані тільки в колах змінного струму. Датчики на основі трансформаторів струму нечутливі до знака струму, що виключає можливість коректної реєстрації струму при реверсі двигуна. Найбільш прийнятним варіантом є використання датчиків струму на основі ефекту Холла. Такі датчики мають ряд переваг, а саме: лінійність вихідної характеристики, наявність гальванічної розв'язки між первинною і вторинною ланцюгом, широкий діапазон частот вимірюваних струмів.
Зазвичай в конструкцію датчика струму на основі ефекту Холла входять магнітопровід, датчик Холла, встановлений в зазорі магнітопровода, і підсилювач вихідного сигналу.
Ефект Холла заснований на взаємодії між рухомими носіями електричного заряду і зовнішнім магнітним полем [3]. Магнітопровід охоплений шиною з вимірюваним струмом. Датчик Холла пронизує магнітний потік, пропорційний вимірюваній струму (рис.3).
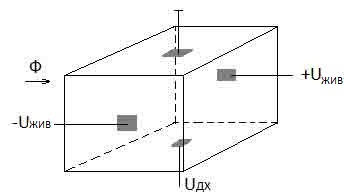
Рисунок 3 — Датчик Холла
До двох протилежних сторон датчика Холла прикладена стабілізована напруга живлення Uжив. З двох інших сторін знімається вихідна напруга Uдх, пропорційна потоку, і, отже, вимірюваному струму.
Серед датчиків струму на основі ефекту Холла, представлених на нашому ринку, можна виділити датчики виробництва фірм Allegro MicroSystems і LEM як найбільш прийнятні для навчальних цілей, виходячи зі співвідношення ціна / якість. Однак датчики виробництва Allegro MicroSystems мають суттєві значення нелінійності та загальної похибки вихідного сигналу [4]. Тому для реалізації гальванічної розв'язки обрані датчики LA 55-P виробництва фірми LEM. Номінальний вимірюваний струм для даних датчиків складає 50 А, що цілком достатньо для вимірювання струму в двигунах, встановлених у лабораторіях університету.
Датчики змонтовані на друковані плати (по два на плату). На платах є всі необхідні конгтакти для подачі напруги живлення і для вихідного сигналу. Зовнішній вигляд датчиків показаний на рисунку 4.

Рисунок 4 — Зовнішній вигляд датчиків струму
Датчики напруги
Для зниження напруги до рівня, прийнятного для плат аналогово-цифрових перетворювачів, була розроблена плата дільників напруги (рис. 5). Відношення вихідної напруги до вхідної для дільника складає 0,025. Це дозволяє при 380 В на вході отримати 9,2 В на виході. Але дільник напруги не забезпечує гальванічну розв'язку між силовим ланцюгом і ланцюгом вимірювання, тому подати вихідну напругу дільника безпосередньо на вхід аналогово-цифрового перетворювача не можна. Для того, щоб гальванічно розв'язати канал вимірювання від силового ланцюга, використовується блок гальванічних розв'язок GISA — 01С.

Рисунок 5 — Зовнішній вигляд плати дільників напруги
Крім плати дільників використовуються також датчики напруги на основі ефекту Холла LV 25-P виробництва фірми LEM, розраховані на напругу 10-500 В. Принцип роботи датчика напруги на основі ефекту Холла полягає в наступному: у первинний ланцюг датчика включений резистор (рис.6). При безпосередньому додатку напруги до вхідних контактів датчика струм резистора трансформується у вторинний струм, пропорційний первинної напрузі [5].
Рисунок 6 — Принципова схема датчика напруги
Визначення характеру вимірюваних сигналів
З метою встановлення характеру вимірюваних сигналів, а також з метою визначення необхідних параметрів аналогово-цифрового перетворювача була проведена попередня реєстрація сигналів, що підлягають подальшим вимірам і обробці. Реєстрація проводилася за допомогою промислового реєстратора сигналів “Рекон-08МС” [6] на експериментальних стендах лабораторії систем керування електроприводами кафедри “Електропривод і автоматизація промислових установок”. Так, реєструвалися струми і напруги в наступних стендах:
- cтенд з дослідження систем скалярного частотного управління асинхронним двигуном на базі перетворювача частоти SAMI Ministar [7];
- стенд з дослідження систем регулювання швидкості за схемою “керований тиристорний випрямляч - двигун” (на базі комплектного електропривода БТУ-3601 [8]);
- стенд з дослідження регулювальних властивостей та алгоритмів керування асинхронним електроприводом на базі перетворювача частоти Micromaster 440 [9].
При дослідженні сигналів системи скалярного частотного керування реєструвалися сигнали в асинхронному двигуні АІМ 71В4 (потужністю 0,75 кВт), що живиться від перетворювача частоти SAMI Ministar. За допомогою плати дільників виконувалася реєстрація однієї лінійної напруги двигуна, що формується за допомогою широтно-імпульсної модуляції частотою 4 кГц. Реєстрація виконувалась при двох частотах дискретизації “Рекон-08МС” - 5 кГц (рис.7а) і 20 кГц (рис.7б). За допомогою датчика струму LEM LA 55-P був зареєстрований струм однієї фази статора при частоті дискретизації “Рекон-08МС” 5 кГц. Отримані графіки напруги показані на рисунку 7 (а, б), графік струму - на рисунку 8. Встановлена в перетворювачі частота живлячої напруги - 50 Гц.
а) б)
Рисунок 7 — Результати реєстрації лінійної напруги статора асинхронного двигуна
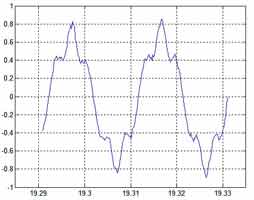
Рисунок 8 — Результати реєстрації струму однієї фази статора асинхронного двигуна
Аналіз графіків напруг, отриманих при різних частотах дискретизації реєстратора, показує, що частоти дискретизації 5 кГц для реєстрації лінійних напруг недостатньо, тому що частина сигналу пропадає, що видно з рисунка 7б. Проте обсяг внутрішньої оперативної пам'яті “Рекон-08МС” не дозволяє записати досить тривалий процес при частоті дискретизації 20 кГц, що робить його непридатним для реєстрації тривалих перехідних процесів в електроприводі, незважаючи на простоту у використанні і наявність гальванічної розв'язки.
Аналіз графіку струму (рис. 8) показує, що для використання отриманих значень для розрахунку невідомих координат необхідно виділяти першу гармоніку струму, і, можливо, фільтрувати сигнал.
При дослідженні сигналів системи регулювання швидкості за схемою “керований тиристорний випрямляч - двигун” (на базі комплектного електропривода БТУ-3601) виконувалася реєстрація струму якоря приводного двигуна ПБСТ-32 (потужністю 0,8 кВт) за допомогою осередка ЯФУ 0145 і швидкості приводного двигуна з допомогою тахогенератора постійного струму, резистивного дільника напруги і осередка гальванічної розв'язки ЯФУ 0153. Використовувана частота дискретизації “Рекон-08МС” - 1 кГц. Результати реєстрації зазначених сигналів при відпрацюванні електроприводом трапецеїдальної тахограми швидкості наведені на рисунку 9 (позначено: I - струм якоря; w - швидкість; wz - сигнал задатчика інтенсивності).
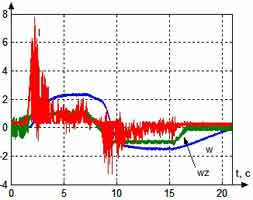
Рисунок 9 — Перехідні процеси в електроприводі постійного струму
З рисунка 9 видно, що при використанні осередка ЯФУ 0145 зареєстролваний сигнал струму є досить зашумленим, що вносить додаткові похибки в реєстрацію.
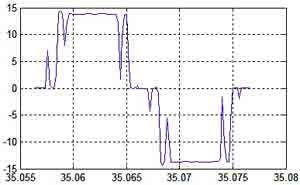
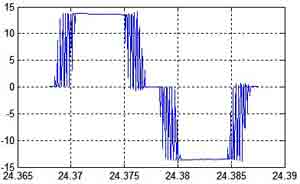
При реєстрації сигналів у системі «перетворювач частоти - асинхронний двигун» для дослідження регулювальних властивостей та алгоритмів керування асинхронним електроприводом були зареєстровані сигнали в асинхронному двигуні А02-51-2-У3 (потужністю 10 кВт), що живиться від перетворювача частоти Micromaster 440. Аналогічними для перетворювача SAMI Ministar методами була проведена реєстрація однієї лінійної напруги і струму однієї фази статора. Були зареєстровані напруги різної частоти, одержувані різними методами широтно-імпульсної модуляції - векторна широтно-імпульсна модуляція (Space Vector Modulation, SVM [10]) і асиметрична векторна широтно-імпульсна модуляція (Asymmetric space vector modulation, ASVM). Також для SVM був зареєстрований струм фази статора частотою 50 Гц. Закон управління, вибраний в перетворювачі, - лінійне U / f регулювання, тобто, U / f = const. Реєстрація проводилася при частоті дискретизації “Рекон-08МС” 20 кГц. Результати реєстрації представлені нижче.
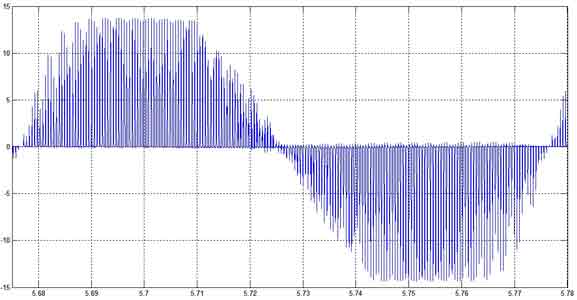
Рисунок 10 — Напруга частотою 10 Гц, отримана за допомогою ASVM частотою 2 кГц
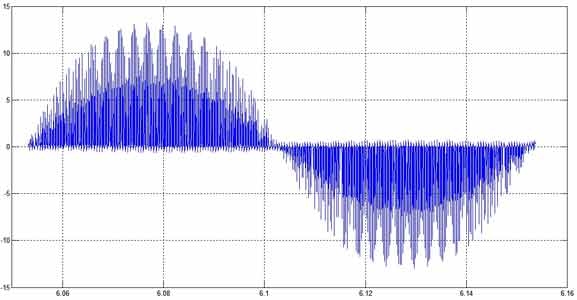
Рисунок 11 — Напруга частотою 10 Гц, отримана за допомогою SVM частотою 2 кГц
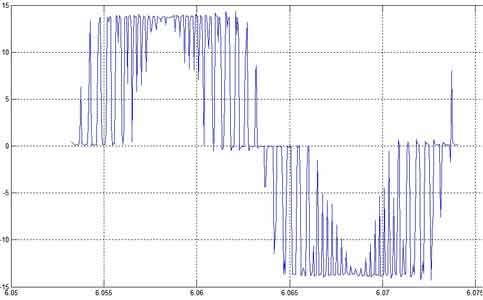
Рисунок 12 — Напруга частотою 50 Гц, отримана за допомогою SVM частотою 2 кГц
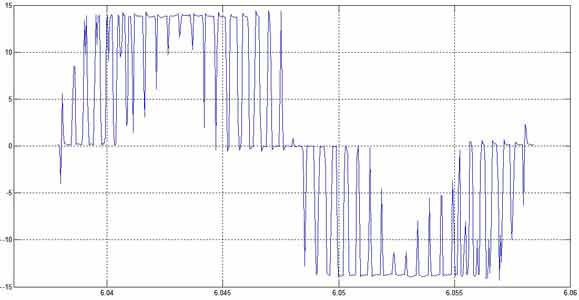
Рисунок 13 — Напруга частотою 50 Гц, отримана за допомогою ASVM частотою 2 кГц
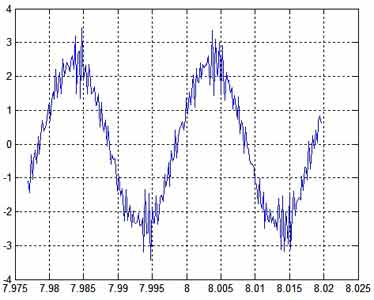
Рисунок 14 — Струм частотою 50 Гц
Як і у випадку з SAMI Ministar, отриманий струм необхідно фільтрувати. Аналіз графіків напруги показує, що величина напруги не змінюється зі зміною частоти, незважаючи на те, що використовується закон керування U / f = const. Це пояснюється тим, що задане співвідношення (U / f = const) підтримується для першої гармоніки напруги, а методами широтно-імпульсної модуляції перша гармоніка формується тривалістю імпульсів напруги та їх шпаруватістю.
Вибір аналогово-цифрового перетворювача
Попередня реєстрація сигналів з метою визначення їх характеру, а також з метою визначення необхідних параметрів аналогово-цифрового перетворювача показала, що перетворювач повинен забезпечувати частоту дискретизації одного каналу не менше 20 кГц при реєстрації сигналів в електроприводі змінного струму, і не менше 1 кГц - в приводі постійного струму. Діапазон вхідних напруг перетворювача повинен складати приблизно ± 10 В, орієнтуючись на датчики струму і напруги. Аналіз представленої на ринку продукції показав, що цим вимогам відповідає мікросистема збору даних з інтерфейсом USB m-DAQ виробництва компанії «ХОЛІТ Дейта Системс ». Мікросистема збору даних m-DAQ широко використовується в освітніх цілях у багатьох навчальних закладах [11]. Це пояснюється, по-перше, простотою в експлуатації, по-друге, відносно низькою вартістю.
Даний пристрій має 8 аналогових входів з діапазоном вхідних напруг ± 10 В. Загальна частота дискретизації аналогово-цифрового перетворювача складає 100 кГц. При урахуванні того факту, що є можливість встановлювати частоту дискретизації для кожного каналу окремо, заявленої сумарної частоти достатньо для реєстрації перехідних процесів у приводах і постійного, і змінного струму.
Важливе зауваження
На момент написання даного реферату магістерська робота ще не закінчена. Остаточне завершення роботи відбудеться в грудні 2011 року. У найближчому майбутньому планується провести реєстрацію сигналів в різних системах електроприводу за допомогою мікросистеми збору даних m-DAQ з послідовною обробкою даних у середовищі MATLAB. Також планується провести реєстрацію тих же сигналів за допомогою аналогово-цифрового перетворювача National Instruments 6023E і провести порівняльний аналіз цих двох пристроїв.
Перелік посилань
- Калинов А.П., Гладырь А.И. Универсальное учебно-исследовательское оборудование для электромеханических лабораторий // Електротехнічні і енергозберігаючі системи. Науково-виробничий журнал. Випуск 1/2007 (1). — Кременчук. — С. 14—19.
- Данилов А. Современные промышленные датчики тока / Андрей Данилов // Современная электроника. — 2004. № 10. — С. 26—35.
- Фрайден Дж. Современные датчики. Справочник / Дж. Фрайден; пер. с англ. Ю.А.Заболотная. — Москва: Техносфера, 2005. — 592 с.
- Калинов А.П. Учебно-исследовательское оборудование на базе универсальных модулей АЦП / А.П.Калинов, Д.Г.Мамчур, А.И.Гладырь // ПиКАД. — 2008. № 4. — С. 42—45.
- Чекмарев А. Датчики тока и напряжения ABB — от печатной платы до преобразователей-гигантов / Алексей Чекмарев // Силовая электроника. — 2006. № 3.
- Инструкция по эксплуатации многоканального регистратора электрических сигналов «РЕКОН-08МС» (версия 7.24). — Донецк: «РЕКОН», 2002. — 34 с.
- SAMI MINISTAR Frequency Converter. Technical Information. — ABB Drives, 1991. — 32 p.
- БТУ-3601. Техническое описание и инструкция по эксплуатации, 1982. — 46 с.
- Micromaster 440. Руководство по эксплуатации. Документация пользователя. Издание А1. — Siemens AG 2007. — 140 с.
- Dorin O. Neacsu. Space vector modulation — an introduction / IECON'01: The 27th Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2001.
- Литвин Н.А. Инновационные подходы к организации практикума по основам технологии сбора данных и программированию / А.Н.Литвин, Е.Ю.Хохлова, А.М.Литвин // ПиКАД. — 2009. № 1. — С. 18—22.