


Журов Игорь Олегович
Электротехнический факультет
Кафедра «Электропривод и автоматизация промышленных установок»
Специальность «Электромеханические системы автоматизации и электропривод»
Разработка методов управления динамическими процессами в условиях неопределенности
Научный руководитель: д.т.н., проф. Толочко Ольга Ивановна
Реферат по теме выпускной работы
Содержание
Введение
1. Бездатчиковое определение скорости
1.1. Определение скорости через величины, записанные во вращающейся системе координат
1.2. Оценка скорости с помощью наблюдателя состояния
2. Идентификация момента инерции электропривода
2.1. Описание рекуррентного метода наименьших квадратов
2.2. Разработка идентификаторов момента инерции электропривода
Заключение
Литература
Введение
Актуальность темы. В настоящее время наиболее распространенными среди систем электропривода переменного тока являются системы векторного управления (СВУ), позволяющие просто и эффективно управлять такими сложными объектами как асинхронный двигатель с короткозамкнутым ротором (АДКЗ). Обычно к таким системам выдвигаются высокие требования, касающиеся точности отработки заданий в динамике и статике.
Известно, что для качественного управления любой системой необходимо иметь максимум достоверной информации об объекте регулирования (ОР). Эта задача усложняется в случаях, когда параметры ОР неизвестны или меняются в процессе его работы.
В системах с асинхронным электроприводом существуют как параметрические, так и сигнальные неопределенности.
К параметрическим неопределенностям относятся активные сопротивления обмоток статора и ротора, которые меняются в зависимости от температуры, взаимная индуктивность, которая меняется в связи с эффектом насыщения магнитной системы главным магнитным потоком, момент инерции привода, который меняется при изменении момента инерции нагрузочного механизма и обладающий при этом наибольшим диапазоном изменений в процессе работы. При этом для повышения робастности системы управления при изменяющемся моменте инерции необходимо применять самонастраивающийся регулятор скорости, что требует параллельного процесса идентификации в режиме on-line.
К сигнальным неопределенностям в отдельных случаях можно отнести потокосцепление ротора и частоту вращения ротора двигателя. В связи с этой проблемой в последнее время появилась тенденция развития методов бездатчикового определения координат электропривода. Такой подход означает передачу электронной части системы функций, которые ранее выполнялись вращающимся механическим датчиком.
Научная значимость работы:
- адаптация систем электропривода к изменению их параметров в процессе работы;
- построение бездатчиковых систем управления электроприводами.
Обзор исследований по теме в ДонНТУ показал, что проблемы идентификации сигнальных и параметрических неопределенностей рассмотрены в работах [3, 4, 10].
Обзор исследований по теме в Украине показал, что проблемы идентификации сигнальных и параметрических неопределенностей рассмотрены в работах [2, 5].
Обзор исследований по теме в мире показал, что проблемы идентификации сигнальных и параметрических неопределенностей рассмотрены в работах [1, 6-9, 11].
1. Бездатчиковое определение скорости
При построении замкнутых систем электропривода надо располагать измеренным значением скорости двигателя, которое на входе системы регулирования сравнивается с заданным значением. В большинстве случаев измерение скорости осуществляется вращающимися датчиками скорости, расположенными на валу двигателя и представляющими собой устройство, которое, часто совместно с электронным преобразующим блоком, преобразует механическую величину – скорость – в аналоговый или дискретный электрический сигнал, пропорциональный измеряемой величине.
В течение последних десятилетий наблюдается тенденция развития методов бездатчикового определения скорости, при которых измеряемая величина определяется косвенным путем через легкодоступные измерению электрические переменные, такие как напряжение на выходе инвертора, от которого питается двигатель, и ток статора.
Бездатчиковое определение скорости может выполняться с использованием различных методов, сложность которых в значительной степени определяется требуемым диапазоном регулирования привода и требованиями к точности измерения скорости.
Рассмотрим два метода определения скорости, основанные на формах математического описания асинхронных двигателей.
1.1. Определение скорости через величины, записанные
во вращающейся системе координат
В основу принципа построения рассматриваемой схемы бездатчикового определения скорости положено математическое описание АД в неподвижной системе координат  . Уравнения для цепей статора и ротора в такой системе координат будут иметь вид:
. Уравнения для цепей статора и ротора в такой системе координат будут иметь вид:
где  ,
,  – векторы напряжения и тока статора двигателя в осях ,
– векторы напряжения и тока статора двигателя в осях ,
В качестве первого шага необходимо произвести ряд таких преобразований первого и третьего и четвертого уравнений системы (1), чтобы из второго уравнения можно было исключить векторы тока и потокосцепления ротора, которые не могут быть измерены. С этой целью надо найти значение  , исключив из формул третьего и четвертого уравнений ток ротора:
, исключив из формул третьего и четвертого уравнений ток ротора:

где  – коэффициент рассеяния машины.
– коэффициент рассеяния машины.
Продифференцировав уравнение (2), получим:

Подставив в него выражение для производной от потокосцепления статора, полученное из первого уравнения (1), определим выражение для второго слагаемого правой части второго уравнения (1):

Вектор тока ротора, также входящий во второе уравнение (1), может быть выражен через векторы потокосцепления и тока статора на основании третьего уравнения (1):

Подставив выражения (2), (4) и (5) во второе уравнение (1), умножив все части равенства на Lm, поделив на Lr и сгруппировав слагаемые, получим выражение, в которое в качестве переменных входят пространственные векторы только тех переменных, которые могут быть измерены:

Левая часть равенства может быть записана в виде проекций векторов напряжения и тока статора на оси неподвижной системы координат:

где  ,
,  – промежуточные переменные, вычисляемые для схемы, представленной на рис.1.
– промежуточные переменные, вычисляемые для схемы, представленной на рис.1.
Далее необходимо перейти в систему координат x-y, вращающуюся с синхронной скоростью. Для этого необходимо определить текущее значение угла  через вычисленные проекции вектора потокосцепления статора. Переходя в систему координат x-y в правой части равенства (6) и направляя ось
через вычисленные проекции вектора потокосцепления статора. Переходя в систему координат x-y в правой части равенства (6) и направляя ось  по вектору потокосцепления статора после разделения вещественной и мнимой частей, выражение (6) можно представить в виде:
по вектору потокосцепления статора после разделения вещественной и мнимой частей, выражение (6) можно представить в виде:

На основании второго из этих равенств вычисляется скорость двигателя [1]:

На основании уравнений (7), (8), (9) можно составить структурную схему идентификатора скорости, изображенную на рис.1.
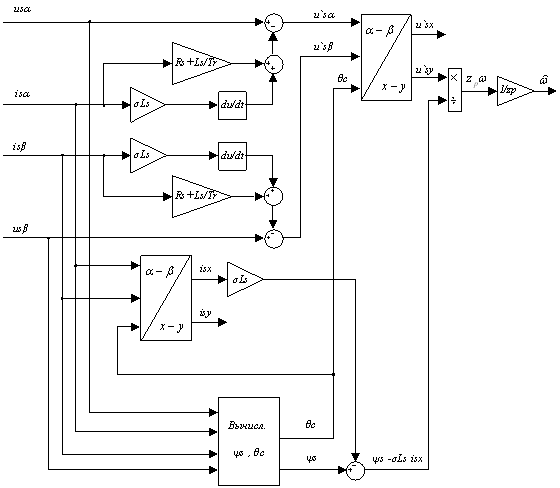 |
Рисунок 1 – Структурная схема идентификатора скорости |
Результаты моделирования системы векторного управления АД с использованием представленного идентификатора показаны на рис.2.
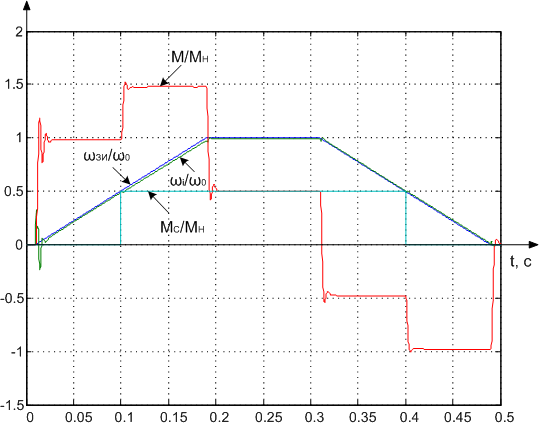 |
Рисунок 2 – Переходные процессы, полученные при использовании идентификатора скорости |
Анализируя полученные результаты, можно сделать вывод о том, что такой метод идентификации скорости применим в системах, в которых не предъявляются высокие требования к динамическим показателям переходных процессов. К тому же все идентификаторы скорости такого типа имеют один общий недостаток – содержат дифференцирующие звенья, и также приводят к появлению алгебраических контуров, что снижает точность идентификации и затрудняет ее техническую реализацию.
1.2. Оценка скорости с помощью наблюдателя состояния
Одним из перспективных альтернативных методов восстановления скорости двигателя при создании качественных систем векторного управления (СВУ) без использования механических датчиков на валу двигателя является использование наблюдателей состояния (НС), которые позволяют, кроме частоты вращения ротора, оценить величину статического момента на валу двигателя. Эта оценка может быть использована для реализации комбинированного управления по возмущению с целью ликвидации статизма СВУ по нагрузке.
Исходными для построения НС являются уравнения Парка-Горева для асинхронного двигателя в ортогональной системе координат d,q, ориентированной по вектору потокосцепления ротора:
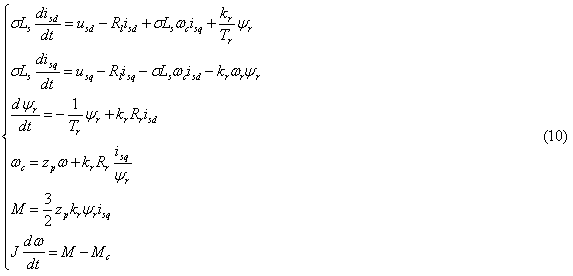
где usd, usq, isd, isq,  – ортогональные составляющие вектора напряжения и тока статора АД и модуль вектора потокосцепления ротора; M, Mc – электромагнитный момент АД и статический момент, приведенный к валу АД;
– ортогональные составляющие вектора напряжения и тока статора АД и модуль вектора потокосцепления ротора; M, Mc – электромагнитный момент АД и статический момент, приведенный к валу АД;  – частота вращения ротора АД;
– частота вращения ротора АД;  – частота вращения системы координат d,q ; Tr=Lr/Rr – электромагнитная постоянная времени ротора; Rs, Rr – активные сопротивления обмоток фаз статора и ротора; kr=Lm/Lr – полные индуктивности статора и ротора и взаимная индуктивность.
– частота вращения системы координат d,q ; Tr=Lr/Rr – электромагнитная постоянная времени ротора; Rs, Rr – активные сопротивления обмоток фаз статора и ротора; kr=Lm/Lr – полные индуктивности статора и ротора и взаимная индуктивность.
Анализ математического описания (10) показывает, что прямую часть НС, оценивающего скорость АД, можно сформировать из части структурной схемы объекта регулирования, полученной из системы (10) после исключения из нее первых двух уравнений и сигнала Mc в уравнении движения привода, как неизмеряемого возмущения. Структурная схема такого НС представлена на рис.3. Его входными сигналами являются измеряемые координаты usq, isd, isq и восстанавливаемые при помощи идентификатора [2] и .
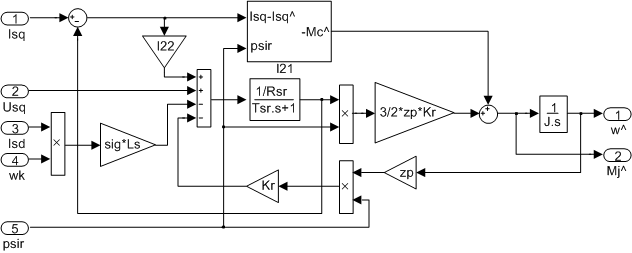 |
Рисунок 3 – Структурная схема наблюдателя состояния |
Для обеспечения желаемого характеристического полинома НС

коэффициенты корректирующих связей НС должны вычисляться по формулам:

где  – среднегеометрический корень (СГК) характеристического полинома. Для нормальной работоспособности НС его СГК должен превышать СГК системы, поэтому его значение может быть принято равным
– среднегеометрический корень (СГК) характеристического полинома. Для нормальной работоспособности НС его СГК должен превышать СГК системы, поэтому его значение может быть принято равным  .
.
Восстановленное значение скорости отличается от действительной скорости на величину, пропорциональную моменту нагрузки Mc, поскольку последний не воздействует на НС, но прикладывается к объекту. При совпадении сходственных параметров объекта регулирования и его модели в составе НС передаточную функцию kf(p) от статического момента до ошибки оценивания скорости, как показано в [3], можно определить по структурной схеме рис.4:

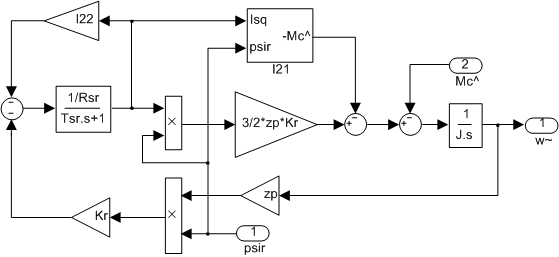 |
Рисунок 4 – Расчетная схема НС для ошибки оценивания скорости |
Для установившегося режима (p стремиться к нолю) ошибка оценивания с учетом (11) составит:

Из выражения (12) следует, что, имея информацию о статическом моменте, ошибку оценивания скорости можно скомпенсировать. Учитывая наличие в наблюдателе, представленном на рис.3, оценки динамического момента, момент статического сопротивления можно идентифицировать по формуле:

Наблюдатель состояния с компенсацией статической ошибки оценивания скорости приведен на рис.5, где подсиситема «w_obs» представляет собой НС рис.3.
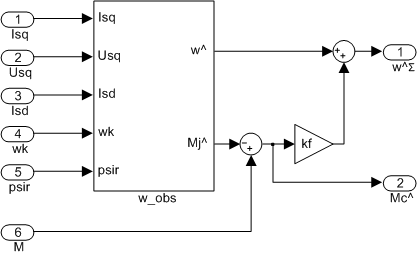 |
Рисунок 5 – Структурная схема НС с компенсацией ошибки оценивания скорости и вычислением момента статического сопротивления |
Если в этом НС коэффициент передачи kf заменить передаточной функцией kf(p), то компенсация будет осуществляться не только в статике, но и в динамике. Система, замкнутая по скорректированной оценке скорости будет иметь такой же статизм при набросе нагрузки, как и СВУ, замкнутая по измеренной скорости [4]:

где  – постоянная времени интегрирования разомкнутого контура скорости;
– постоянная времени интегрирования разомкнутого контура скорости;  - малая постоянная времени системы, отражающая инерционность АИН с ШИМ.
- малая постоянная времени системы, отражающая инерционность АИН с ШИМ.
Таким образом, в системе с предложенным НС может быть достигнут астатизм по нагрузке. При соответствующем выборе значения такие системы имеют динамические свойства, которые характеризуются большим быстродействием без существенного увеличения колебательности переходных процессов, по сравнению с динамическими свойствами системы с пропорционально-интегральным РС.
На рис.6 показаны графики переходных процессов в системе векторного управления АД при использовании для оценки скорости наблюдателя состояния рис.5.
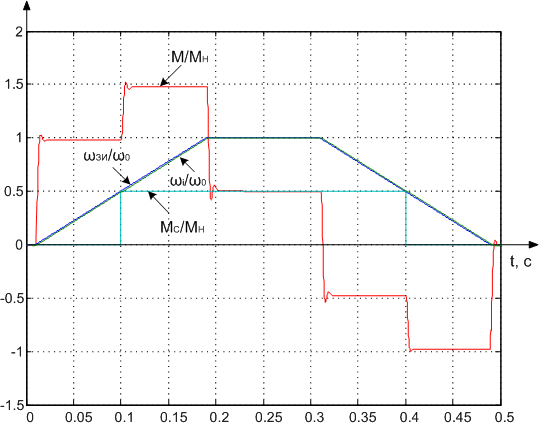 |
Рисунок 6 – Переходные процессы, полученные при использовании наблюдателя состояния |
2. Идентификация момента инерции электропривода
Задачи идентификации параметров в электромеханических системах – это отдельная область теории автоматического управления. Развитие и усовершенствование цифровых вычислительных машин (ЦВМ) предоставили возможность реализовывать принципиально новые научные подходы относительно управления и идентификации.
Проанализируем современные методы идентификации параметров. Вообще, подходы для определения параметров можно поделить на две группы: рекуррентные и аналитические.
Аналитические методы предусматривают определение параметров ОУ на основе данных переходного процесса. В отличие от рекуррентных, аналитические методы позволяют непосредственно выразить неизвестные параметры через координаты электропривода. Они строятся на разнообразных моделях электромеханической системы, что связано с определенными трудностями.
Количество задач, которые могут быть решены аналитически, ограничено из-за необходимости делать существенное допущения относительно исследуемых моделей систем [5].
Рекуррентные методы представляют собой основной подход к идентификации параметров объекта управления (ОУ) с использованием адаптивных (наладочных) моделей [6–9]. Структурная схема системы идентификации параметров ОУ с использованием адаптивной модели приведена на рис. 7, на котором обозначено: АМ – адаптивная модель; КК – критерий качества; u – управляющий сигнал ОУ; y - выходной сигнал ОУ;  – выходной сигнал АМ;
– выходной сигнал АМ;  – погрешность оценивания выходного сигнала.
– погрешность оценивания выходного сигнала.
 |
Рисунок 7 – Структурная схема системы идентификации параметров ОУ на основе адаптивной модели |
Существуют разные поисковые и беспоисковые методы определения параметров АМ. Но практически все известные алгоритмы поиска параметров основаны на пошаговом (рекуррентном) приближении к экстремуму критерия качества [6, 8].
Одним из наиболее распространенных методов параметрической идентификации, позволяющих достаточно точно оценивать параметры ОУ является рекуррентный метод наименьших квадратов (РМНК).
2.1. Описание рекуррентного метода наименьших квадратов
Предположим, что линейный аналоговый ОУ с одним входом и одним выходом с некоторой степенью точности можно описать дискретной передаточной функцией (ПФ):

ПФ (17) соответствует разностное уравнение:

где y(z), u(z) – z-преобразование выходного и входного сигналов соответственно; y[k], y[k-1], ..., y[k-n], u[k], u[k-1], ..., u[k-m] - последовательность значений выходного и соответственно входного сигнала в фиксированные моменты времени; k - целое число, которое соответствует конкретному моменту времени; n, m – порядок знаменателя и числителя соответственно.
Объединим коэффициенты уравнения (18) в вектор параметров:

а значения выходных и входных сигналов в дискретные моменты времени – в вектор измеренных сигналов:

Тогда уравнение (18) примет вид:

Выход адаптивной модели можно рассчитать как:

где  – оценки выходного сигнала и вектора неизвестных параметров в соответствующие моменты времени.
– оценки выходного сигнала и вектора неизвестных параметров в соответствующие моменты времени.
Запишем выражение для ошибки оценивания выходного сигнала:

Целью параметрической идентификации по методу наименьших квадратов является определение таких значений вектора оценок параметров, которые бы минимизировали функцию, в данном случае – интегральную квадратичную ошибку оценивания, для которой справедливо выражение:

где K - количество измеренных комбинаций входного сигнала и соответствующего ему выходного.
Условием минимизации выражения (24) является:

где  - вектор частных производных от минимизируемой функции (24) по неизвестным параметрам, который называется ее градиентом.
- вектор частных производных от минимизируемой функции (24) по неизвестным параметрам, который называется ее градиентом.
Чаще всего уравнение (25) решают численными методами, самое большое распространение среди которых получили градиентные методы [6, 9-11]. При использовании простейшего из градиентных методов одна итерация выполняется согласно формуле:

Вектор коррекции на k-м шаге определяется по выражению:

где P[k-1] – матрица, которая влияет на скорость поиска и на k-м шаге рассчитывается по выражению:

для которой задается начальное условие  .
После подстановки выражения для градиента (25) в (26) получаем:
.
После подстановки выражения для градиента (25) в (26) получаем:

В общем случае в ПФ (17) часть коэффициентов могут быть известными величинами. Тогда вектор параметров должен содержать только неизвестные коэффициенты, а вектор измеренных сигналов – только те компоненты входных и выходных сигналов, которые в разностном уравнении (18) умножаются на неизвестные коэффициенты, а сумма произведений остальных компонент на известные коэффициенты добавляется к уравнению (22) в виде известного сигнала  :
:

Если часть ОУ, которая подлежит идентификации, содержит только один неизвестный параметр, то переменные  и
и  становятся скалярными, а задача минимизации существенно упрощается, поскольку она становится одномерной [10].
становятся скалярными, а задача минимизации существенно упрощается, поскольку она становится одномерной [10].
2.2. Разработка идентификаторов момента инерции электропривода
Применим изложенную выше методику для идентификации момента инерции электропривода. В этом случае в качестве ОУ удобно применять механическую часть ЭП с непрерывной ПФ:

При дискретизации ПФ (31) методом Тастина получим следующее разностное уравнение, которое является исходным для построения адаптивной модели:

где Ts - период дискретности адаптивной модели.
Из анализа уравнения (32) вытекает, что задача идентификации момента инерции привода тесно связана с задачей определения момента статического сопротивления, величина которого не поддается прямому измерению. Поэтому, для идентификации момента инерции желательно иметь математическую модель, которая не содержала бы момента статического сопротивления.
Для решения этой задачи можно использовать подход, предложенный в роботах [9-11], в соответствии с которым запишем уравнение (32) для [k-1]-го момента времени:

и отнимем от уравнения (33) уравнение (32). После некоторых преобразований получаем:

Предполагая, что изменением момента статического сопротивления на протяжении одного периода дискретности можно пренебречь, получаем окончательное выражение для дискретной модели выбранного ОУ:

Сопоставляя разностное уравнение (35) с уравнением (30), обозначим:

С учетом (30) и (36) уравнение (29) принимает вид:

Идентифицированный параметр формируется из параметров адаптивной модели согласно уравнению:

Начальные условия для идентификаторов: 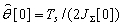 , где
, где  .
.
Структурная схема разработанного идентификатора представлена на рис. 8.
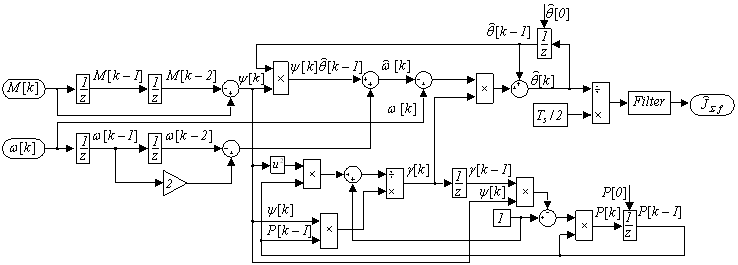 |
Рисунок 8 – Структурная схема идентификатора момента инерции электропривода |
Результаты моделирования системы векторного управления АД с идентификацией момента инерции привода изображены ра рис.9.
 |
Рисунок 9 – Визуализация переходных процессов в системе векторного управления АД с идентификацией момента инерции состоит из 7 кадров с задержкой между кадрами 1 с, задержка до повторного воспроизведения составляет 2 с; количество повторений равно 5) |
Заключение
- С помощью разработанного НС можно точно восстанавливать значение скорости вращения ротора АД за счет компенсации ошибки оценивания, возникающей при наличии возмущающего воздействия в объекте (момента нагрузки).
- Выполненные исследования замкнутой по оценке скорости системы позволяют судить о возможности использования синтезированного НС для построения астатических по возмущению систем косвенного регулирования скорости АД с векторным управлением и ориентацией по вектору потокосцепления ротора без установки механических датчиков на валу двигателя.
- Разработанный идентификатор позволяет достаточно точно оценивать момент инерции электропривода при условии наличия известных сигналов скорости вращения двигателя и электромагнитного момента.
- При постоянной величине электромагнитного момента процесс идентификации приостанавливается;
- В случаях, когда существуют интервалы времени с постоянной величиной момента М, следует применять тестовый сигнал (синусоида, пила или меандр) малой амплитуды и высокой частоты.
- ШИМ положительно влияет на процесс идентификации, позволяя отказаться от введения тестового сигнала;
- Коэффициент влияет на скорость идентификации;
- Для достижения удовлетворительного качества идентификации величина периода дискретности идентификатора должна быть равной или меньше в целое число раз периода дискретности регулятора тока.
Список литературы
- Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: Учебник для студ. высш. учебн. заведений / Г.Г. Соколовский. – 2-е изд., стер. – М.: Издательский центр «Академия», 2006. – 272 с.
- Пивняк Г.Г., Волков А.В. Современные частотно-регулируемые асинхронные электроприводы с широтно-импульсной модуляцией: Монография. – Днепропетровск: Национальный горный университет, 2006. – 470 с.
- Толочко О.І. Аналіз та синтез електромеханічних систем зі спостерігачами стану. Навч. посібник для студентів вищих навчальних закладів. – Донецьк: Норд-Прес, 2004. – 298 с.
- Толочко О.И. Астатическая по нагрузке система управления скоростью асинхронного двигателя с наблюдателем состояния./ Толочко О.И., Чекавский Г.С., Песковатская О.В.// Сборник материалов V Международной (XVI Всероссийской) научной конференции по автоматизированному электроприводу "АЭП-2007": 18 -21 сентября 2007 г. - Санкт-Петербург, 2007. - С. 69 - 71.
- Балахонцев О.В. Ідентифікація параметрів і координат асинхронного електропривода в режимі реального часу. Дисертація на здобуття наукового ступеню канд. техн. наук: 05.09.03 / НГУ. – Дніпропетровськ, 2006. – 167 с.
- L. Ljung System Identification – Theory For the User, 2nd ed / L. Ljung. – N.J.: PTR Prentice Hall, Upper Saddle River, 1999. – 609 p.
- Семенов А. Д., Артамонов Д. В., Брюхачев А.В. Идентификация объектов управления (учебное пособие) / Семенов А. Д., Артамонов Д.В., Брюхачев А.В. - Пенза: Изд-во Пенз. гос. ун-та, 2003.- 211 с.
- Изерман Р. Цифровые системы управления / Изерман Р. – М.: Мир, 1984. – 541 с.
- Inertia identification and auto-tuning of induction motor using MRAS / Yujie Guo, Lipei Huang, Yang Qiu, Masaharu Muramatsu // Power Electronics and Motion Control Conference. Proceedings. IPEMC 2000. The Third International (15-18/08/2000) vol. 2. – 2000. – pp. 1006-1011.
- Трандафілов В.М. Особливості градієнтного метода ідентифікації моменту інерції електроприводу / В.М. Трандафілов, О.І. Толочко, В.В. Божко // Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць X Міжнародної науково-технічної конференції аспірантів та студентів в м. Донецьку 18-20 травня 2010 р. – Донецьк: ДонНТУ, 2010. – С. 260-262.
- Andreescu G. D. Torque-speed adaptive observer and inertia identification without current transducers for control of electric drives / Andreescu G. D., Rabinovici R. // International conference on electrical machines, Espoo, FINLANDE (28/08/2000). 2000. – P. 1428-1432.