


Журов Ігор Олегович
Електротехнічний факультет
Кафедра "Електропривод та автоматизація промислових установок"
Спеціальність "Електромеханічні системи автоматизації та електропривод"
Розробка методів керування динамічними процесами в умовах невизначеності
Науковий керівник: д.т.н., проф. Толочко Ольга Іванівна
Реферат з теми випускної роботи
Зміст
Вступ
1. Бездатчикове визначення швидкості
1.1. Визначення швидкості через величини, записані в обертовій системі координат
1.2. Оцінка швидкості за допомогою спостерігача стану
2. Ідентифікація моменту інерції електроприводу
2.1. Опис рекурентного методу найменших квадратів
2.2. Розробка ідентифікаторів моменту інерції електроприводу
Висновки
Література
Вступ
Актуальність теми. Сьогодні найпоширенішими серед систем електроприводу змінного струму є системи векторного керування (СВК), що дозволяють просто й ефективно керувати такими складними об'єктами як асинхронний двигун з короткозамкненим ротором АДКЗ). Звичайно до таких систем висуваються високі вимоги, що стосуються точності відпрацьовування завдань у динаміці та статиці.
Відомо, що для якісного керування будь-якою системою необхідно мати максимум достовірної інформації про об'єкт регулювання (ОР). Ця задача ускладнюється у випадках, коли параметри ОР невідомі або змінюються в процесі його роботи.
У системах з асинхронним електроприводом існують як параметричні, так і сигнальні невизначеності.
До параметричних невизначеностей відносяться активні опори обмоток статора й ротора, які змінюються залежно від температури, взаємна індуктивність, яка змінюється у зв'язку з ефектом насичення магнітної системи головним магнітним потоком, момент інерції приводу, який змінюється при зміні моменту інерції навантажувального механізму, що й володіє при цьому найбільшим діапазоном змін у процесі роботи. При цьому для підвищення робастності системи керування при моменті інерції, що змінюється, необхідно застосовувати самонастроювальний регулятор швидкості, що вимагає паралельного процесу ідентифікації в режимі on-lіne.
До сигнальних невизначеностей в окремих випадках можна віднести потокозчеплення ротора й частоту обертання ротора двигуна. У зв'язку із цією проблемою останнім часом з'явилася тенденція розвитку методів бездатчикового визначення координат електропривода. Такий підхід означає передачу електронної частини системи функцій, які раніше виконувалися обертовим механічним датчиком.
Наукова значимість роботи:
- адаптація систем електроприводу до зміни їх параметрів у процесі роботи;
- побудова бездатчикових систем керування електроприводами.
Огляд досліджень за темою в ДонНТУ показав, що проблеми ідентификації сигнальних та параметричних невизначеностей розглянуті в роботах [3, 4, 10]
Огляд досліджень за темою в Україні показав, що проблеми ідентификації сигнальних та параметричних невизначеностей розглянуті в роботах [2, 5]
Огляд досліджень за темою у світі показав, що проблеми ідентификації сигнальних та параметричних невизначеностей розглянуті в роботах [1, 6-9, 11]
1. Бездатчикове визначення швидкості
При побудові замкнених систем електроприводу треба мати в розпорядженні обмірюване значення швидкості двигуна, яке на вході системи регулювання порівнюється із заданим значенням. У більшості випадків вимірювання швидкості здійснюється обертовими датчиками швидкості, розташованими на валу двигуна, що й представляють собою обладнання, яке, часто разом з електронним перетворювальним блоком, перетворює механічну величину – швидкість – в аналоговий або дискретний електричний сигнал, пропорційний вимірюваній величині.
Протягом останніх десятиліть спостерігається тенденція розвитку методів бездатчикового визначення швидкості, при яких вимірювана величина визначається непрямим шляхом через легкодоступні вимірюванню електричні змінні, такі як напруга на виході інвертора, від якого живиться двигун, і струм статора.
Бездатчикове визначення швидкості може виконуватися з використанням різних методів, складність яких у значній мірі обумовлюється необхідним діапазоном регулювання приводу й вимогами до точності вимірювання швидкості.
Розглянемо два методи визначення швидкості, засновані на формах математичного опису асинхронних двигунів.
1.1. Визначення швидкості через величини, записані
в обертовій системі координат
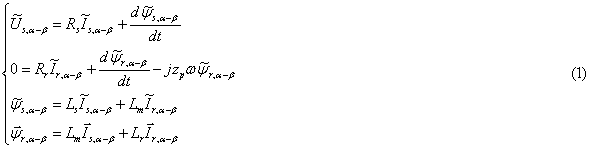
В основу принципу побудови розглянутої схеми бездатчикового визначення швидкості покладений математичний опис АД в нерухомій системі координат  . Рівняння для ланцюгів статора й ротора в такій системі координат будуть мати вигляд:
. Рівняння для ланцюгів статора й ротора в такій системі координат будуть мати вигляд:
де  ,
,  – вектори напруги й струму статора двигуна в осях ,
– вектори напруги й струму статора двигуна в осях ,
У якості першого кроку необхідно зробити ряд таких перетворень першого й третього й четвертого рівнянь системи (1), щоб із другого рівняння можна було виключити вектори струму й потокозчеплення ротора, які не можуть бути обмірювані. Із цією метою треба знайти значення  , виключивши з формул третього й четвертого рівнянь струм ротора:
, виключивши з формул третього й четвертого рівнянь струм ротора:

де  – коефіцієнт розсіювання машини.
– коефіцієнт розсіювання машини.
Після диференціювання рівняння (2), одержимо:

Підставивши в нього вираз для похідної від потокозчеплення статора, отримане з першого рівняння (1), визначимо вираз для другого доданка правої частини другого рівняння (1):

Вектор струму ротора, що також входить у друге рівняння (1), може бути виражений через вектори потокозчеплення й струму статора на підставі третього рівняння (1):

Підставивши вирази (2), (4) і (5) у друге рівняння (1), помноживши всі частини рівняння на Lm, поділивши на Lr і згрупувавши доданки, одержимо вираз, у яке в якості змінних входять просторові вектори тільки тих змінних, які можуть бути обмірювані:

Ліва частина рівняння може бути записана у вигляді проекцій векторів напруги й струму статора на осі нерухомої системи координат:

де  ,
,  – проміжні змінні, що обчислюються для схеми, представленої на рис.1.
– проміжні змінні, що обчислюються для схеми, представленої на рис.1.
Далі необхідно перейти в систему координат x-y, що обертається із синхронною швидкістю. Для цього необхідно визначити поточне значення кута  через обчислені проекції вектора потокозчеплення статора. Переходячи в систему координат x-y у правій частині рівняння (6) і спрямовуючи вісь за вектором потокозчеплення статора після розділення дійсної й уявної частин, вираз (6) можна представити у вигляді:
через обчислені проекції вектора потокозчеплення статора. Переходячи в систему координат x-y у правій частині рівняння (6) і спрямовуючи вісь за вектором потокозчеплення статора після розділення дійсної й уявної частин, вираз (6) можна представити у вигляді:

На підставі другого із цих рівностей обчислюється швидкість двигуна [1]:

На підставі рівнянь (7), (8), (9) можна скласти структурну схему ідентифікатора швидкості, зображену на рис.1.
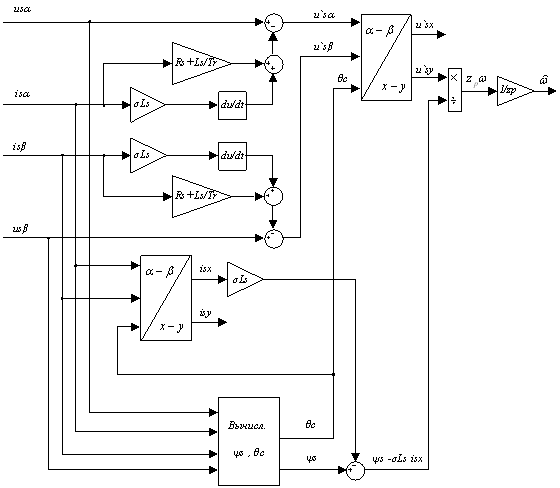 |
Рисунок 1 – Структурна схема ідентифікатора швидкості |
Результати моделювання системи векторного керування АД з використанням представленого ідентифікатора зображені на рис.2.
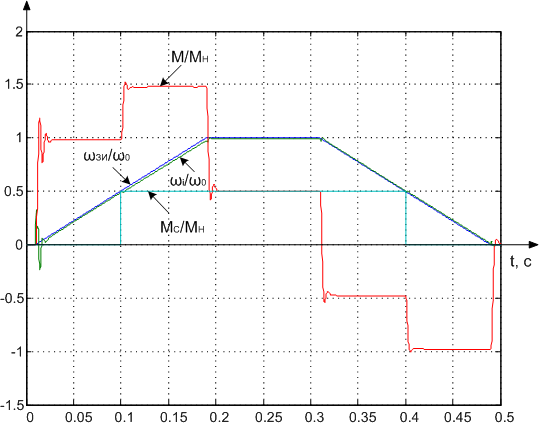 |
Рисунок 2 – Перехідні процеси, отримані при використанні ідентифікатора швидкості |
Аналізуючи отримані результати, можна зробити висновок про те, що такий метод ідентифікації швидкості застосуємо в системах, у яких не пред'являються високі вимоги до динамічних показників перехідних процесів. До того ж усі ідентифікатори швидкості такого типу мають один спільний недолік – містять ланки, що диференціюють, і також призводять до появи алгебраїчних контурів, що знижує точність ідентифікації й утрудняє її технічну реалізацію.
1.2. Оцінка швидкості за допомогою спостерігача стану
Одним з перспективних альтернативних методів відновлення швидкості двигуна при створенні якісних систем векторного керування (СВК) без використання механічних датчиків на валу двигуна є використання спостерігачів стану (СС), які дозволяють, крім частоти обертання ротора, оцінити величину статичного моменту на валу двигуна. Ця оцінка може бути використана для реалізації комбінованого керування за збуренням, з метою ліквідації статизму СВК за навантаженням.
Вихідними для побудови СС є рівняння Парка-Горєва для асинхронного двигуна в ортогональній системі координат d,q, орієнтованої за вектором потокозчеплення ротора:
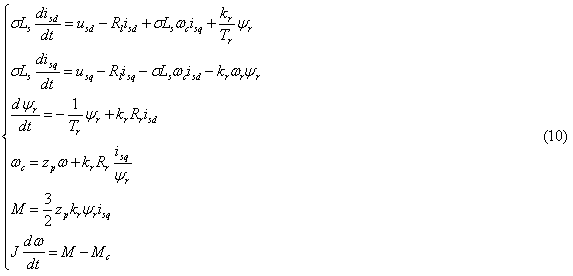
де usd, usq, isd, isq,  – ортогональні складові вектора напруги й струму статора АД й модуль вектора потокозчеплення ротора; M, Mc – електромагнітний момент АД й статичний момент, приведений до валу АД;
– ортогональні складові вектора напруги й струму статора АД й модуль вектора потокозчеплення ротора; M, Mc – електромагнітний момент АД й статичний момент, приведений до валу АД;  – частота обертання ротора АД;
– частота обертання ротора АД;  – частота обертання системи координат d,q ; Tr=Lr/Rr – електромагнітна постійна часу ротора; Rs, Rr – активні опори обмоток фаз статора й ротора; kr=Lm/Lr – повні індуктивності статора й ротора й взаємна індуктивність.
– частота обертання системи координат d,q ; Tr=Lr/Rr – електромагнітна постійна часу ротора; Rs, Rr – активні опори обмоток фаз статора й ротора; kr=Lm/Lr – повні індуктивності статора й ротора й взаємна індуктивність.
Аналіз математичного опису (10) показує, що пряму частину СС, що оцінює швидкість, можна сформувати із частини структурної схеми об'єкта регулювання, отриманої із системи (10) після виключення з неї перших двох рівнянь і сигналу Mc у рівнянні руху приводу, як невимірюваного збурювання. Структурна схема такого СС представлена на рис.3. Його вхідними сигналами є вимірювані координати usq, isd, isq і відновлювані за допомогою ідентифікатора [2] и .
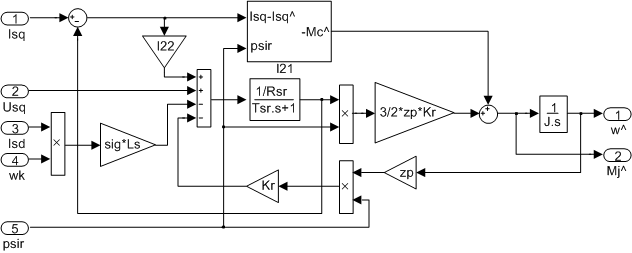 |
Рисунок 3 – Структурна схема спостерігача стану |
Для забезпечення бажаного характеристичного полінома СС

коефіцієнти корегувальних зв'язків СС повинні обчислюватися за формулами:

де
 – середньогеометричний корінь (СГК) характеристичного полінома. Для нормальної працездатності СС його СГК повинен перевищувати СГК системи, тому його значення може бути прийняте рівним
– середньогеометричний корінь (СГК) характеристичного полінома. Для нормальної працездатності СС його СГК повинен перевищувати СГК системи, тому його значення може бути прийняте рівним  .
.
Відновлене значення швидкості відрізняється від дійсної швидкості на величину, пропорційну моменту навантаження Mc, оскільки останній не впливає на СС, але прикладається до об'єкта. При збігу подібних параметрів об'єкта регулювання і його моделі в складі СС передатну функцію kf(p) від статичного моменту до помилки оцінювання швидкості, як показано в [3], можна визначити за структурною схемою рис.4:

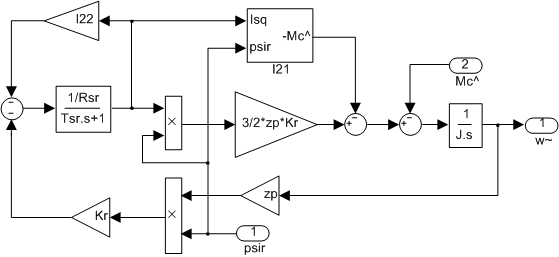 |
Рисунок 4 – Расчетная схема НС для ошибки оценивания скорости |
Для режиму, що встановився (p прагнути до нуля), помилка оцінювання з урахуванням (2) складе:

З виразу (3) випливає, що, маючи інформацію про статичний момент, помилку оцінювання швидкості можна компенсувати. Враховуючи наявність у спостерігачі, представленому на рис.3, оцінки динамічного моменту, момент статичного опору можна ідентифікувати за формулою:

Спостерігач стану з компенсацією статичної помилки оцінювання швидкості наведений на рис.5, де підсистема «w_obs» представляє собою СС рис.3.
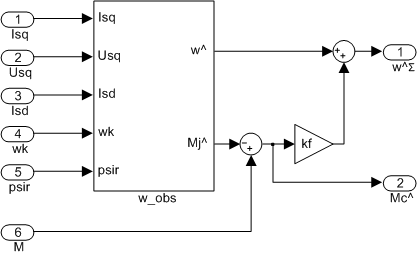 |
Рисунок 5 – Структурна схема СС з компенсацією похибки оцінювання швидкості та обчисленням момента статичного опору |
Якщо в цьому СС коефіцієнт передачі kf замінити передатною функцією kf(p), то компенсація буде здійснюватися не тільки в статиці, але й у динаміці. Система, замкнена за скорегованою оцінкою швидкості, буде мати такий самий статизм при накиді навантаження, як і СВУ, замкнена за обмірюваною швидкістю [4]:

де
 – стала часу інтегрування розімкненого контуру швидкості;
– стала часу інтегрування розімкненого контуру швидкості;  – мала стала часу системи, що відбиває інерційність АІН з ШІМ.
– мала стала часу системи, що відбиває інерційність АІН з ШІМ.
Таким чином, у системі із запропонованим СС може бути досягнений астатизм за навантаженням. При відповідному виборі значення
такі системи мають динамічні властивості, які характеризуються більшою швидкодією без істотного збільшення коливальності перехідних процесів у порівнянні з динамічними властивостями системи із пропорційно-інтегральним РШ.
На рис.6 зображені графіки перехідних процесів у системі векторного керування АД при використанні для оцінки швидкості спостерігача стану рис.5.
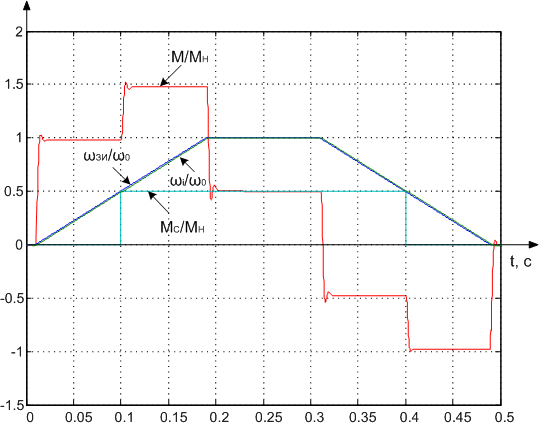 |
Рисунок 6 – Перехідні процеси, отримані при використанні спостерігача стан |
2. Ідентифікація моменту інерції електроприводу
Задачі ідентифікації параметрів в електромеханічних системах – це окре-ма галузь теорії автоматичного керування. Розвиток та удосконалення цифрових обчислювальних машин (ЦОМ) надали можливість реалізовувати принципово нові наукові підходи щодо керування та ідентифікації.
Проаналізуємо сучасні методи ідентифікації параметрів. Взагалі, підходи для визначення параметрів можна поділити на дві групи: рекурентні та аналітичні.
Аналітичні методи передбачають визначення параметрів ОК на основі даних перехідного процесу. На відміну від ітеративних, аналітичні методи дозволяють безпосередньо виразити невідомі параметри через координати електропривода. Вони будуються на різноманітних моделях електромеханічної системи, що пов’язано з певними труднощами.
Кількість задач, які можуть бути вирішені аналітично, обмежена через необхідність робити суттєві припущення щодо досліджуваних моделей систем [5].
Рекурентні методи являють собою основний підхід до ідентифікації параметрів об’єкта керування (ОК), з використанням адаптивних (налагоджувальних) моделей [6–9]. Структурна схема системи ідентифікації параметрів ОК з використанням адаптивної моделі наведена на рис. 7, на якому позначено: АМ – адаптивна модель; КЯ – критерій якості; u – керуючий сигнал ОК; y – вихідний сигнал ОК;  – вихідний сигнал АМ;
– вихідний сигнал АМ;  – похибка оцінювання вихідного сигналу.
– похибка оцінювання вихідного сигналу.
 |
Рисунок 7 – Структурна схема системи ідентификації параметрів ОК на основі адаптивної моделі |
Існують різноманітні пошукові та безпошукові методи визначення параметрів АМ. Але практично усі відомі алгоритми пошуку параметрів основані на покроковому (рекурентному) наближенні до екстремуму критерію якості [6, 8].
Одним з найпоширеніших методів параметричної ідентификації, що дозволяють достатньо точно оцінювати параметри ОК є рекурентний метод найменших квадратів (РМНК).
2.1. Опис рекурентного методу найменших квадратів
Припустимо, що лінійний аналоговий ОК з одним входом та одним виходом з деякою точністю можна описати дискретною передатною функцією (ПФ):

ПФ (17) відповідає різницеве рівняння:

де y(z), u(z) – z-перетворення вихідного та вхідного сигналів відповідно; y[k], y[k-1], ..., y[k-n], u[k], u[k-1], ..., u[k-m] – послідовність значень вихідного та відповідно вхідного сигналу у фіксовані моменти часу; k – ціле число, яке відповідає конкретному моменту часу; n, m – порядок знаменника та чисельника відповідно.
Об’єднаємо коефіцієнти рівняння (18) в вектор параметрів:

а значення вихідних та вхідних сигналів у дискретні моменти часу – в вектор виміряних сигналів:

Тоді рівняння (18) прийме вид:

Вихід адаптивної моделі можна розрахувати як:

де
 – оцінки вихідного сигналу та вектору невідомих параметрів у відповідні моменти часу.
– оцінки вихідного сигналу та вектору невідомих параметрів у відповідні моменти часу.
Запишемо вираз для похибки оцінювання вихідного сигналу:

Метою параметричної ідентифікації за методом найменших квадратів є визначення таких значень вектору оцінок параметрів, які б мінімізували функцію, у цьому випадку – інтегральну квадратичну похибку оцінювання, для якої справедливим є вираз:

де K – кількість виміряних комбінацій вхідного сигналу та відповідного йому вихідного.
Умовою мінімізації виразу (24) є:

де
 – вектор частинних похідних від функції, що мінімізується (24), по невідомих параметрах, який називається її градієнтом.
– вектор частинних похідних від функції, що мінімізується (24), по невідомих параметрах, який називається її градієнтом.
Найчастіше рівняння (25) розв’язують чисельними методами, найбільше розповсюдження серед яких отримали градієнтні методи [6, 9-11]. При використанні найпростішого з градієнтних методів одна ітерація виконується згідно формули:

Вектор корекції на k-му кроці визначається за виразом:

де P[k-1] – матриця, яка впливає на швидкість пошуку та на k-му кроці розраховується за виразом:

для якої задається початкова умова
 .
Після підстановки виразу для градієнту (25) в (26) отримуємо:
.
Після підстановки виразу для градієнту (25) в (26) отримуємо:
В загальному випадку в ПФ (17) частина коефіцієнтів можуть бути відомими величинами. Тоді вектор параметрів повинен містити тільки невідомі коефіцієнти, вектор виміряних сигналів – тільки ті компоненти вхідних та вихідних сигналів, які в різницевому рівнянні (18) помножуються на невідомі коефіцієнти, а сума добутків решти компонент на відомі коефіцієнти додається до рівняння (22) у вигляді відомого сигналу
 :
:
Якщо частина ОК, яка підлягає ідентифікації, містить тільки один невідомий параметр, то змінні
 та
та  стають скалярними, а задача мінімізації суттєво спрощується, оскільки вона стає одномірною [10].
стають скалярними, а задача мінімізації суттєво спрощується, оскільки вона стає одномірною [10].2.2. Розробка ідентифікаторів моменту інерції приводу
Застосуємо викладену вище методику для ідентифікації моменту інерції приводу. В цьому випадку в якості ОК зручно застосовувати механічну частину приводу з неперервною ПФ:

При дискретизації ПФ (31) методом Тастіна отримуємо наступне різницеве рівняння, яке є початковим для побудови адаптивної моделі:

де Ts – період дискретності адаптивної моделі.
З аналізу рівняння (32) витікає, що задача ідентифікації моменту інерції приводу тісно взаємопов’язана з задачею визначення моменту статичного опору, величина якого не піддається прямому вимірюванню. Тому, для ідентифікації моменту інерції бажано мати математичну модель, яка не містила б моменту статичного опору.
Для вирішення цієї задачі можна використовувати підхід, запропонований у роботах [9-11], у відповідності до якого запишемо рівняння (32) для [k-1]-го моменту часу:

та віднімемо від рівняння (33) рівняння (32). Після деяких перетворень отримуємо:

Припускаючи, що зміною моменту статичного опору протягом одного періоду дискретності можна знехтувати, отримуємо остаточний вираз для дискретної моделі вибраного ОК:

Зіставляючи різницеве рівняння (35) з рівнянням (30), позначимо:

З урахуванням (30) и (36) рівняння (29) приймає вид:

Ідентифікований параметр формується з параметрів адаптивної моделі згідно рівнянню:

Початкові умови для ідентифікаторів:  , де
, де  .
.
Структурна схема розробленого ідентифікатора зображена на рис. 8.
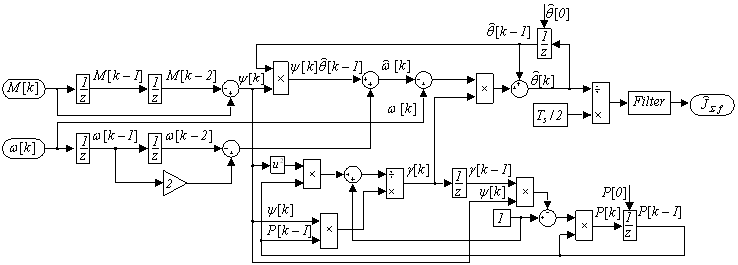 |
Рисунок 8 – Структурна схема ідентифікатора моменту інерції електроприводу |
Результати моделювання системи векторного керування АД з ідентифікацією моменту інерції приводу зображені на рис.9
 |
Рисунок 9 – Візуалізація перехідних процесів у системі векторного керування АД з ідентифікацією моменту інерції складається з 7 кадрів із затримкою між кадрами 1 с, затримка до повторного відтворення складає 2 с; кількість повторень дорівнює 5) |
Висновки
- За допомогою розробленого СС можна точно відновлювати значення швидкості обертання ротора АД за рахунок компенсації помилки оцінювання, що виникає при наявності збурення в об'єкті (моменту навантаження).
- Виконані дослідження замкненої за оцінкою швидкості системи дозволяють судити про можливість використання синтезованого СС для побудови астатичних за збуренням систем непрямого регулювання швидкості АД з векторним керуванням і орієнтацією за вектором потокозчеплення ротора без установки механічних датчиків на валу двигуна.
- Розроблений ідентифікатор дозволяє достатньо точно оцінювати момент інерції електроприводу за умови наявності відомих сигналів швидкості обертання двигуна та електромагнітного моменту.
- При постійній величині електромагнітного моменту процес ідентифікації припиняється;
- У випадках, коли існують інтервали часу з постійною величиною моменту М, слід застосовувати тестовий сигнал (синусоїда, пилка або меандр) малої амплітуди й високої частоти.
- ШІМ позитивно впливає на процес ідентифікації, дозволяючи відмовитися від уведення тестового сигналу;
- Коефіцієнт
 впливає на швидкість ідентифікації;
впливає на швидкість ідентифікації; - Для досягнення задовільної якості ідентифікації величина періоду дискретності ідентифікатора повинна бути рівною або менше в ціле число разів періоду дискретності регулятора струму.
Література
- Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: Учебник для студ. высш. учебн. заведений / Г.Г. Соколовский. – 2-е изд., стер. – М.: Издательский центр «Академия», 2006. – 272 с.
- Пивняк Г.Г., Волков А.В. Современные частотно-регулируемые асинхронные электроприводы с широтно-импульсной модуляцией: Монография. – Днепропетровск: Национальный горный университет, 2006. – 470 с.
- Толочко О.І. Аналіз та синтез електромеханічних систем зі спостерігачами стану. Навч. посібник для студентів вищих навчальних закладів. – Донецьк: Норд-Прес, 2004. – 298 с.
- Толочко О.И. Астатическая по нагрузке система управления скоростью асинхронного двигателя с наблюдателем состояния./ Толочко О.И., Чекавский Г.С., Песковатская О.В.// Сборник материалов V Международной (XVI Всероссийской) научной конференции по автоматизированному электроприводу "АЭП-2007": 18 -21 сентября 2007 г. - Санкт-Петербург, 2007. - С. 69 - 71.
- Балахонцев О.В. Ідентифікація параметрів і координат асинхронного електропривода в режимі реального часу. Дисертація на здобуття наукового ступеню канд. техн. наук: 05.09.03 / НГУ. – Дніпропетровськ, 2006. – 167 с.
- L. Ljung System Identification – Theory For the User, 2nd ed / L. Ljung. – N.J.: PTR Prentice Hall, Upper Saddle River, 1999. – 609 p.
- Семенов А. Д., Артамонов Д. В., Брюхачев А.В. Идентификация объектов управления (учебное пособие) / Семенов А. Д., Артамонов Д.В., Брюхачев А.В. - Пенза: Изд-во Пенз. гос. ун-та, 2003.- 211 с.
- Изерман Р. Цифровые системы управления / Изерман Р. – М.: Мир, 1984. – 541 с.
- Inertia identification and auto-tuning of induction motor using MRAS / Yujie Guo, Lipei Huang, Yang Qiu, Masaharu Muramatsu // Power Electronics and Motion Control Conference. Proceedings. IPEMC 2000. The Third International (15-18/08/2000) vol. 2. – 2000. – pp. 1006-1011.
- Трандафілов В.М. Особливості градієнтного метода ідентифікації моменту інерції електроприводу / В.М. Трандафілов, О.І. Толочко, В.В. Божко // Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць X Міжнародної науково-технічної конференції аспірантів та студентів в м. Донецьку 18-20 травня 2010 р. – Донецьк: ДонНТУ, 2010. – С. 260-262.
- Andreescu G. D. Torque-speed adaptive observer and inertia identification without current transducers for control of electric drives / Andreescu G. D., Rabinovici R. // International conference on electrical machines, Espoo, FINLANDE (28/08/2000). 2000. – P. 1428-1432.