
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Анализ известных способов и устройств управления скоростным режимом асинхронного электропривода шахтных ленточных конвейеров
- 3.1 Реостатное регулирование угловой скорости АД
- 3.2 Управление скоростным режимом с помощью каскадных схем регулирования скорости АД
- 3.3 Управление скоростью АД с помощью преобразователя частоты
- 3.4 Управление скоростью АД с помощью импульсного регулирования электрических параметров
- 4. Обоснование структуры модели исследования процессов при импульсном управлении асинхронным электроприводом
- Список источников
Введение
Пуск асинхронного двигателя путем непосредственного (контакторного) подключения к сети питания отмечается работой этой электрической машины на неустойчивой части механической характеристики с последующим переходом на устойчивую (рабочую) характеристику. В этих условиях скоростной режим ротора двигателя отмечается растущим его ускорением от начала пуска до прохождения точки критического скольжения. Такое интенсивное ускорение ротора двигателя и, соответственно, приводного барабана конвейера создает неблагоприятные условия по эксплуатации конвейерной ленты. Так, наличие упругого звена, как конвейерная лента при интенсивном разгоне приводного барабана ведет к появлению упругих волн деформации, значительных многократно повторяющихся динамических перегрузок в тяговом органе в процессе пуска конвейера (рис. 1.1) [1].
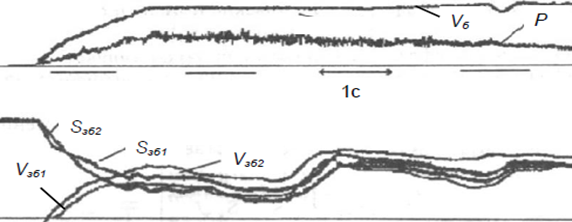
Рисунок 1.1 – Осцилограммы параметров пуска ленточного конвейера 1Л100К-1 при непосредственном подключении приводного двигателя мощностью 100 кВт к сети [11]:
Vб – скорость барабана конвейера; Vзб1 ; Vзб2 – скорость участка ленты, сбегающей с барабана (параметры 1-го та 2-го датчиков); Sзб1; Sзб2 – растягивающее усилие в участке ленты, сбегающей с барабана (параметры 1-го та 2-го датчиков); P – мощность двигателя
Этот недостаток можно устранить с помощью применения различных способов регулирования скорости приводного двигателя.
1. Актуальность темы
Отсутствие эффективных средств регулирования скорости ограничивает функциональные возможности привода, обусловливает повышенный износ его элементов в связи с высокой интенсивностью разгона. Поэтому задача создания регулируемого электропривода горных машин имеет научную и практическую актуальность.
Средства воздействия на скоростной режим асинхронного двигателя (АД) такие как импульсное, реостатное, каскадное регулирование также могут быть в принципе использованы для обеспечения более приемлемых технических характеристик электропривода горных машин. Однако, целесообразность их применения должна быть обоснована в каждом отдельном случае. В целом основу силовых полупроводниковых устройств управления скоростью АД, которые относятся к наиболее распространенным техническим средствам, составляют силовые полупроводниковые ключевые схемы. При этом транзисторные ключи отличаются улучшенной функциональностью, поскольку не требуют применения специальных устройств принудительного отключения в цепях постоянного тока. Поэтому задача применения силовых транзисторных переключателей схем устройства плавного пуска электропривода горных машин представляет наибольший практический интерес.
2. Цель и задачи исследования, планируемые результаты
Целью исследования является повышение эффективности эксплуатации шахтного ленточного конвейера путем применения средства автоматизации пуска выполненного за счет научного обоснования параметров транзисторного регулятора.
Основные задачи исследования:
- Выполнить аналитический обзор исследований и разработок в области управления пуском.
- Разработать математическую и компьютерную модели системы «транзисторный регулятор – асинхронный двигатель», а также исследовать и проанализировать процессы в ней.
- Обосновать и разработать структурную и принципиальную схему средства автоматизации пуска ленточного конвейера.
- Обосновать требования по безопасной эксплуатации разработанного средства автоматизации.
Объект исследования: шахтный ленточный конвейер
Предмет исследования: асинхронный двигатель привода ленточного конвейера
3. Анализ известных способов и устройств управления скоростным режимом асинхронного электропривода шахтных ленточных конвейеров
Для того, чтобы уменьшить влияние неблагоприятных процессов, возникающих при непосредственном подключении двигателя к сети применяют различные способы управления скоростным режимом двигателя. Ниже приведены основные способы управления скоростью двигателя.
3.1 Реостатное регулирование угловой скорости АД
Способ реостатного регулирования угловой скорости АД касается только машин с фазным ротором и реализуется подключением группы внешних резисторов в цепь трехфазной роторной обмотки двигателя. В основном, этот способ применяется для управления режимом разгона (замедлением разгона) двигателя путем постепенного закорачивания отдельных секций дополнительных роторных резисторов. Наличие этих резисторов приводит к увеличению наклона механической характеристики двигателя, в результате, растет его пусковой момент.
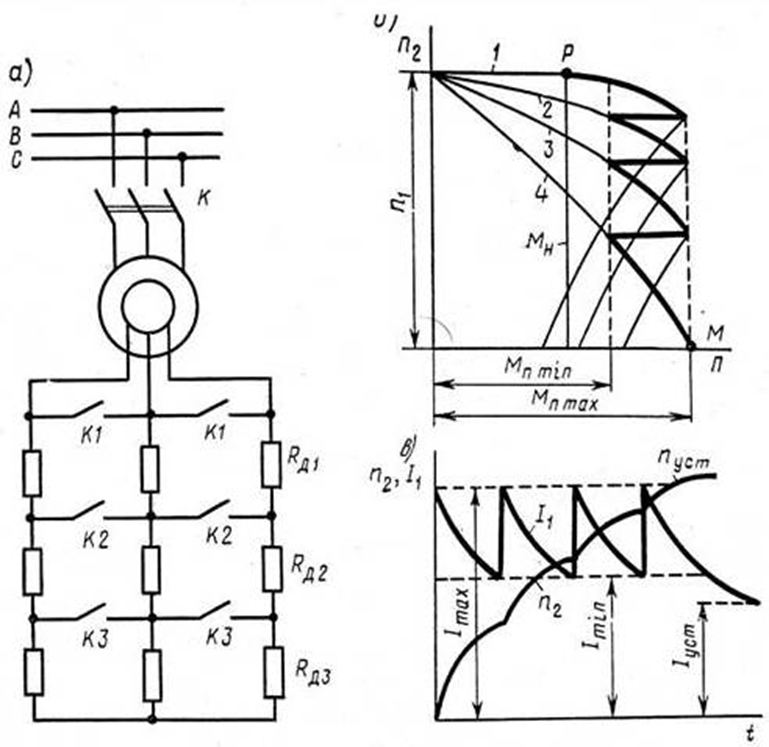
Рисунок 3.1 – Схема включения асинхронного двигателя при реостатном пуске (а), его пусковая диаграмма (б), графики изменения частоты вращения и тока (в) [12].
Достоинства реостатного регулирования скоростного режима: дешевизна оборудования, простота эксплуатации.
Недостатки: малая экономичность, поскольку энергия скольжения ротора в процессе в значительной степени превращается в тепловую энергию нагрева дополнительных роторных резисторов.
3.2 Управление скоростным режимом с помощью каскадных схем регулирования скорости АД
Принцип регулирования скорости асинхронного двигателя в каскадных схемах заключается во введении в роторную цепь добавочной ЭДС. Ток ротора в этом случае определяется разностью векторов ЭДС ротора и добавочной: изменяя величину добавочной ЭДС можно регулировать ток ротора, а, следовательно, и момент двигателя, и в конечном итоге, скорость.
Исходя из удобства практической реализации, наиболее целесообразно в цепи ротора суммировать не трехфазную переменную ЭДС, а ЭДС постоянного тока. С этой целью в цепь ротора двигателя включается выпрямитель. Источником добавочной ЭДС может служить либо машина постоянного тока (машинно-вентильный каскад), либо статический преобразователь, подключенный к питающей сети (вентильный каскад).
В АВК энергия скольжения вначале преобразуется в энергию постоянного тока, а затем инвертором АИ1 в энергию переменного тока фиксированной частоты. Трансформатор ТV1 предназначен для согласования выходного напряжения инвертора с напряжением сети. Для регулирования скорости АВК необходимо изменять величину ЭДС инвертора на стороне постоянного тока за счет изменения угла открывания тиристоров β.
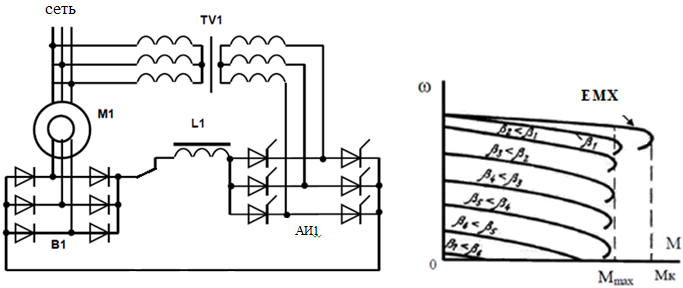
Рисунок 3.2 – Схема подключения и механические характеристики асинхронного двигателя (М1) с фазным ротором при регулировании угловой скорости схемой асинхронного вентильного каскада [11].
Таким образом, каскадные способы позволяют регулировать величину угловой скорости асинхронного двигателя в широком диапазоне, поддерживать достаточно высокую жесткость механических характеристик и отличаются возможностью возврата части энергии скольжения ротора в питающую сеть.
3.3 Управление скоростью АД с помощью преобразователя частоты
Структурно преобразователь частоты представлен преобразователем со звеном постоянного тока, представленной выпрямителем 1 и емкостным фильтром 2 на выходе (рис. 3.3) [2]. Напряжение переменной частоты формируется автономным инвертором напряжения 3 и подается на асинхронный двигатель потребителя через сглаживающий дроссель 4. В процессе формирования трехфазной системы выходных напряжений преобразователя применяется принцип широтно-импульсной модуляции.
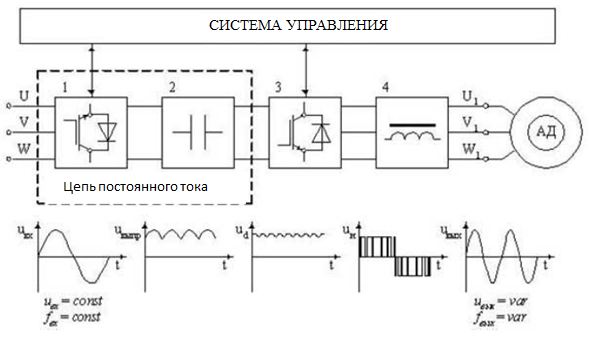
Рисунок 3.3 – Блочно-структурная схема преобразователя частоты [11]
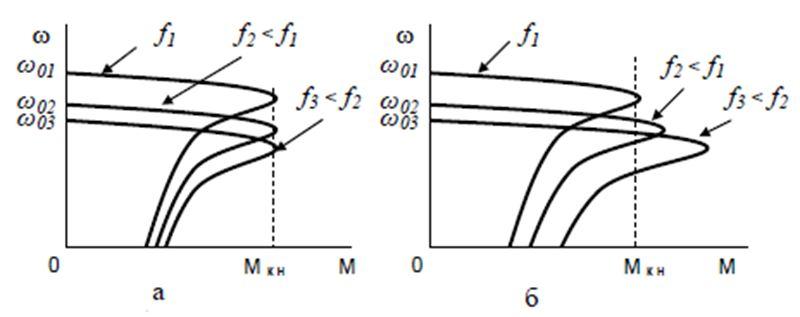
Рисунок 3.4 – Механические характеристики асинхронного двигателя при частотном управлении скоростными режимами а) Uф / f = const;
б) Uф = const [13]
Как видно из механических характеристик двигателя частотный метод управления скоростным режимом сопровождается некоторыми недостатками, т.к. уменьшение частоты при не изменившейся величине напряжения питания приведет к существенному увеличению момента двигателя, что является опасным относительно повреждения механических элементов трансмиссии и должно сопровождаться повышенным потребляемым током из-за уменьшения индуктивных сопротивлений двигателя. В случае, если увеличить частоту напряжения питания асинхронного двигателя до величины, превышающей частоту сети, то для обеспечения номинального критического момента необходимо повышение величины этого напряжения питания. В условиях промышленного предприятия это требует применения специальной трансформаторной подстанции, рассчитанной на формирование выходного напряжения повышенной величины, и, соответственно, рассчитанных на это напряжение силовой коммутационной аппаратуры и аппараты защиты (в частности, от утечки тока на землю). Работа преобразователя частоты также сопровождается наличием высокочастотных составляющих в спектре выходных напряжений инвертора, которая обусловливает существенное уменьшение емкостного сопротивления изоляции сети токам этих частот и образует дополнительную опасность электропоражения (рис. 3.5) [2; 3; 4; 5]. Кроме того, при возникновении утечки тока на землю в цепи постоянного тока между сетью и землей возникает дополнительный источник постоянного напряжения, ток которой может значительно превысить величину оперативного тока аппарата защиты (АЗ) от утечки тока на землю и этим блокировать его работу.
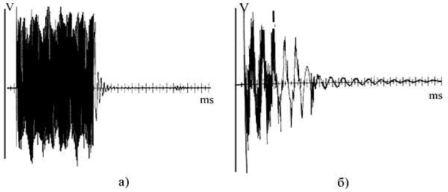
Рисунок 3.5 – Осциллограммы тока утечки на землю в участковой сети с преобразователем частоты при частоте его выходного напряжения
5 Гц (а) и 70 Гц (б) [2]
Таким образом, эксплуатация частотно-управляемого асинхронного электропривода в условиях шахты возможна только при условии применения специально адаптированного аппарата защиты от утечек тока на землю.
Достоинства частотного способа регулирования скорости двигателя: простота реализации; возможность использовать разомкнутые схемы управления для установок, замедление пуска которых не предусматривает соблюдение заданной диаграммы скорости при колебаниях момента.
Однако, в таком способе регулирования есть существенный недостаток: наличие совокупности высокочастотных составляющих в спектре выходных сопротивлений инвертора обуславливает существенное уменьшение емкостного сопротивления изоляции сети и создает дополнительную опасность поражения электричеством. Кроме того, при возникновении утечек тока на землю в цепи постоянного тока между сетью и землей возникает дополнительный источник постоянного напряжения, ток которого может значительно превысить величину оперативного тока аппарата защиты от утечек тока на землю и этим будет блокировать его работу.
3.4 Управление скоростью АД с помощью импульсного регулирования электрических параметров
Для управления скоростью АД также можно применить систему импульсного регулирования, которая сочетает в себе компоненты реостатного регулирования. Работа схемы основывается на применении транзисторного регулятора напряжения в цепи статора приводного асинхронного двигателя.
Сущность импульсного регулирования заключается в периодическом (импульсном) изменении параметров цепей АД или питающей сети. Применительно к асинхронному ЭП чаще всего осуществляется импульсное изменение подводимого к АД напряжения или сопротивлений резисторов в цепях ротора или статора. Эти способы применяются главным образом для регулирования скорости, хотя при необходимости они позволяют регулировать (ограничивать) ток и момент АД. Примеры импульсных регуляторов скорости в цепи ротора приведены на рис. 3.6.
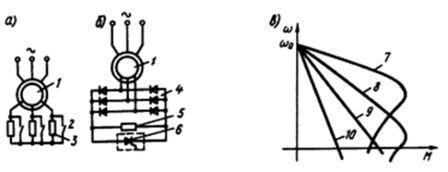
Рисунок 3.6 – Устройство импульсных регуляторов скорости (а, б) и механические характеристики привода (в) [14]
Импульсное регулирование напряжения на статоре АД может быть реализовано с помощью тиристорного или транзисторного регулятора напряжения. В этом случае реализуются искусственные механические характеристики, аналогичные изображенным на рис. 3.7.
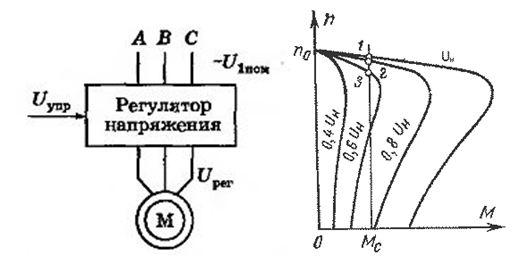
Рисунок 3.7 – Структурная схема и механические характеристики АД при использовании импульсного регулирования в цепи статора [15].
Для реализации заданной диаграммы скорости необходима обратная связь с двигателем. Однако, существует противоречие по критерию быстродействия реакции схемы тиристорного регулятора напряжения на команды системы управления, в связи со спецификой запирания тиристоров. В то же время транзисторные устройства плавного пуска имеют более высокие по сравнению с тиристорными энергетические показатели и позволяют реализовывать заданные алгоритмы управления пуском без привязки к моменту перехода напряжения сети через ноль, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
Транзисторы являются полностью управляемыми приборами и по своим техническим характеристикам делятся на биполярные, биполярные с изолированным затвором (англ. IGBT), полевые (англ. MOSFET) и полевые со статической индукцией (англ. SIT). Наибольшее распространение в силовых транзисторных преобразователях получили транзисторы типа IGBT, сочетающие в себе положительные свойства биполярного (низкие потери мощности во включенном состоянии) и полевого (высокое входное сопротивление) транзисторов.
Для улучшения показателей регулирования координат АД импульсным способом создаются замкнутые ЭП с использованием различных обратных связей.
Структурная схема, составленная на основании описания объекта исследования, представлена на рис. 3.8.
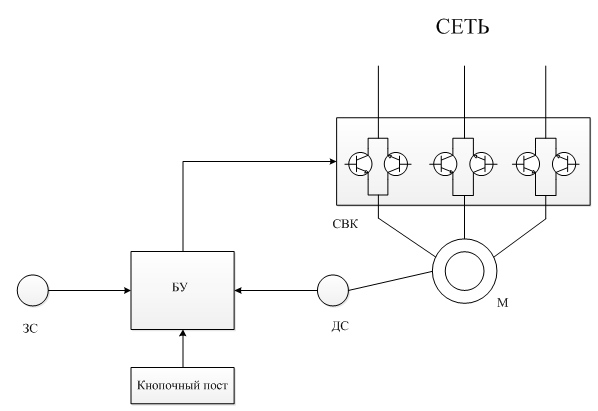
Рисунок 3.8 – Структурная схема транзисторного регулятора напряжения
Принцип работы схемы транзисторного регулятора напряжения в цепи статора можно увидеть на рис. 3.9.
Рисунок 3.9 – Принцип работы схемы транзисторного регулятора напряжения
(анимация: 11 кадров, 5 циклов повторения, 49 килобайт)
где 1 – блок управления; 2 – задатчик скорости; 3 – датчик скорости; 4 – силовой транзисторный ключ; М – асинхронный двигатель
4. Обоснование структуры модели исследования процессов при импульсном управлении асинхронным электроприводом
Для того чтобы лучше понять физические процессы, происходящие в АКЗ, исследуем машину неподвижной системе координат, сделаем некоторые выводы, необходимые при построении электропривода на базе этой машины. Также необходимо учесть, что для представления пространственных векторов используется комплексная плоскость.
В неподвижной комплексной системе координат (ωк = 0, αк = 0) вещественная ось обозначается через α, а мнимая через β. Пространственные векторы в этом случае раскладываются по осям:

Подставив эти значения в уравнения, описывающие электропривод и приравняв отдельно вещественные и мнимые части, получим [8]:
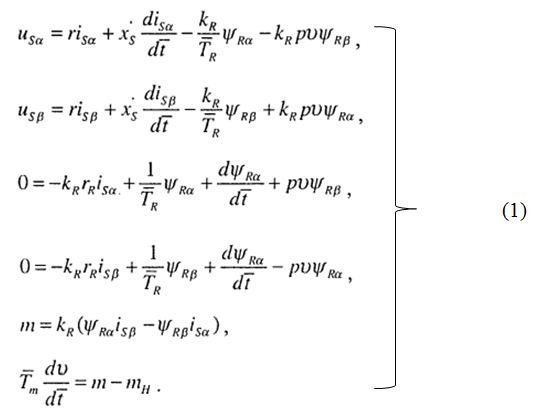
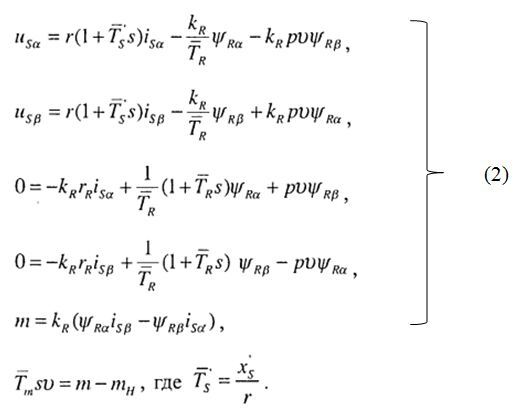
Система уравнений (1) в операторной форме имеет вид [8]:
На вход модели в момент времени  подаются напряжения
подаются напряжения 
 тем самым реализуя прямой пуск.
тем самым реализуя прямой пуск.
Осциллоскопы измеряют относительные значения электромагнитного момента и скорости. Результаты моделирования представлены на рис. 4.2. Они показывают, что при прямом пуске вначале наблюдаются значительные колебания момента. Такие же колебания наблюдаются в токе и скорости. Кроме того, они показывают, что при приложении момента нагрузки наблюдается уменьшение скорости.
С помощью разработанной модели воссоздадим графически поведение системы асинхронного двигателя в процессе пуска.
Структурная схема исследуемой системы составленной в MatLab приведена на рисунке 4.1
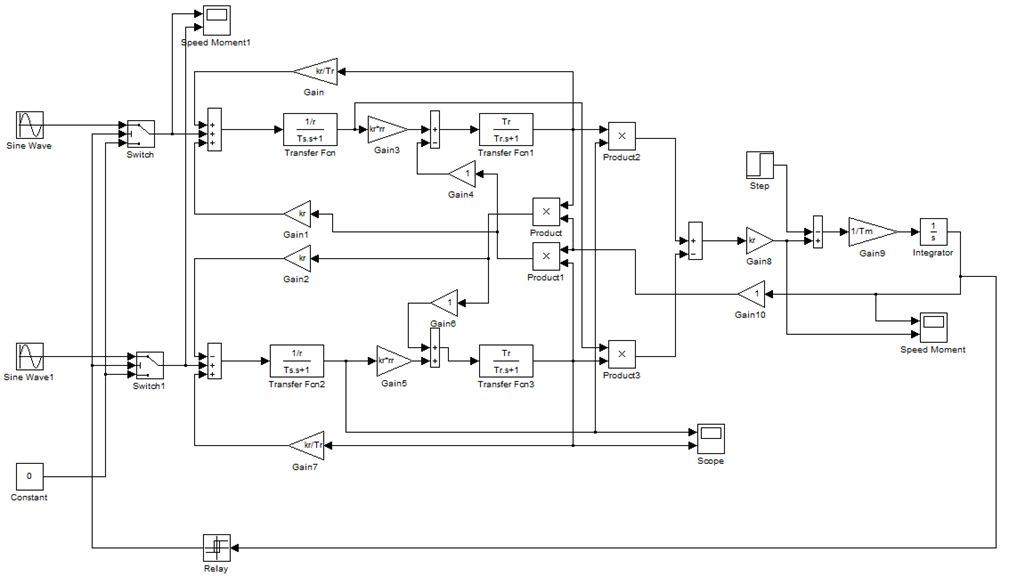
Рисунок 4.1 – Структурная схема асинхронного двигателя в процессе пуска
В схеме (рис. 4.1) в качестве системы управления транзисторными ключами выступает реле, которое подает сигнал на отключение транзисторов при достижении двигателем заданной скорости.
Полученные в результате моделирования скорость двигателя и момент приведены на рис. 4.2.
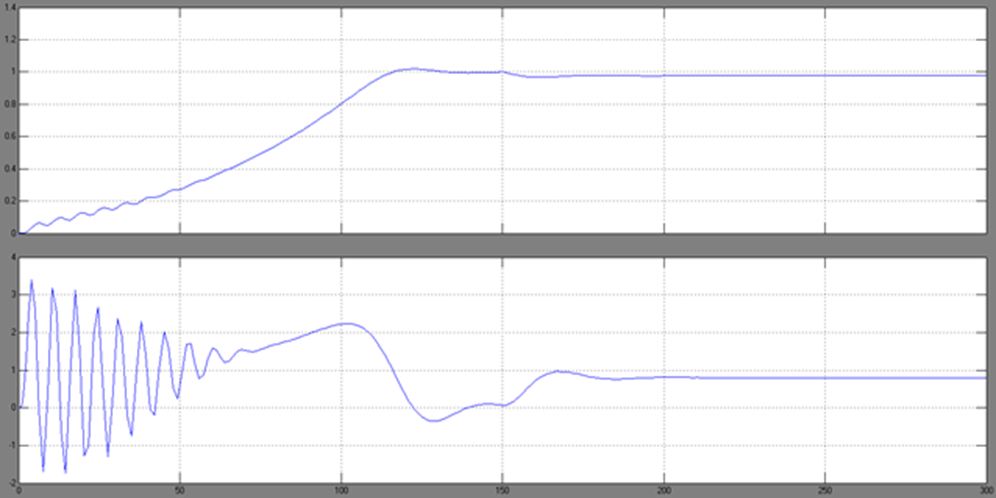
Рисунок 4.2 – Диаграммы скорости и момента двигателя в момент пуска
С помощью импульсного управления можно поддерживать двигатель на заданном уровне скорости. Также с помощью введения в схему дополнительных блоков в дальнейшем возможно задание более плавной диаграммы пуска, что позволит увеличить время пуска и снизить момент на валу двигателя при пуске.
Таким образом, создана и опробована модель, позволяющая оценить функциональные свойства импульсного управления АД и может быть учтена при проектировании соответствующих устройств.
Список источников
- Савицкий В.Н. Защита от токов утечки в комбинированных распределительных сетях угольных шахт / В.Н. Савицкий, Н.И. Стадник – 13 с.
- Маренич К.Н. Асинхронный электропривод горной машины. Корректировка пусковых параметров / К.Н. Маренич; Сб. науч. тр. горно-электромеханического факультета. – Донецк: ДонГТУ, 1996. – с.176-177.
- Киампо Е.М. Токи утечки в комбинированной электрической сети горных машин / Е.М. Киампо, В.А. Коровкин; Известия вузов. Горный журнал. – 1986. – №2. – с.97-99.
- Белошистов А.И. Проблемы защиты от утечек тока на землю распределительных сетей угольных шахт, содержащих силовые полупроводниковые элементы / А.И. Белошистов, В.Н. Савицкий // Взрывозащищенное электрооборудование: Сб. науч. тр. УкрНИИВЭ. – Донецк: ООО «Юго-Восток, Лтд», 2004. – с. 78-83.
- Колосюк В.П. Токи утечки на землю в системе электроснабжения комбайнов с регулируемым приводом / В.П. Колосюк, Ю.В. Товстик // Уголь Украины. – 2005. – №6. – с. 35-39.
- Ставицкий В.Н., Маренич К.Н. Полупроводниковый преобразователь для автоматизированного электропривода горной машины. // Наукові праці Донецького національного технічного університету. Серія: обчислювальна техніка та автоматизація. Випуск 58. – Донецьк: ДонНТУ, 2003. – с. 122-129
- Груба В.И. Технические средства автоматизации в горной промышленности: Учебное пособие / В.И. Груба, Э.К. Никулин, А.С. Оголобченко. – К.: ИСМО, 1998. – 373 с.
- Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в Matlab 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2001. – 320 с., ил.
- Копылов И.П. Математическое моделирование электрических машин: Учеб. для вузов по спец. «Электрич. мишины». – М.: Высш. шк., 1987. – 284 с.:ил.
- Маренич К.Н. А.С. 1824835 СССР, МКИ В65С23/00 Способ управления пуском шахтного ленточного конвейера и устройство для его осуществления. К.Н. Маренич, С.В. Дзюбан, И.Т. Сидоренко и др. (СССР), опубл. 05.02.1990
- Маренич К.Н. Автоматизированный электропривод машин и установок шахт и рудников: Учебное пособие / К.Н. Маренич, Ю.В. Товстик, В.В.
- Слайд 31 из презентации «Асинхронный двигатель» к урокам физики на тему «Электричество». Режим доступа: http://900igr.net/prezentatsii
- Битюцкий А.Ю. Исследование принципа квазичастотного управления асинхронным электроприводом в контексте задачи автоматической расштыбовки скребкового конвейера. Автореф. магистерской работы. [Электронный ресурс] – Режим доступа: Портал магистров ДонНТУ, Факультет КИТА, 2012 г.
- Москаленко В.В. Электрический привод: Учебное пособие / В.В. Москаленко. – 2-е изд., стер. – М.: Издательский центр «Академия», 2004. – 368 с.
- Электронный ресурс «Школа для электрика». Режим доступа: http://electricalschool.info