
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження
- 3. Аналіз відомих способів і пристроїв управління швидкісним режимом асинхронного електроприводу шахтних стрічкових конвеєрів
- 3.1 Реостатне регулювання кутової швидкості АД
- 3.2 Управління швидкісним режимом за допомогою каскадних схем регулювання швидкості АД
- 3.3 Управління швидкістю АД з допомогою перетворювача частоти
- 3.4 Управління швидкістю АД з допомогою імпульсного регулювання електричних параметрів
- 4. Обгрунтування структури моделі дослідження процесів при імпульсному управлінні асинхронним електроприводом
- Перелік посилань
Вступ
Пуск асинхронного двигуна шляхом безпосереднього (контакторного) підключення до мережі живлення відзначається роботою цієї електричної машини на нестійкій частині механічної характеристики з наступним переходом на стійку (робочу) характеристику. У цих умовах швидкісний режим ротора двигуна відзначається зростаючим його прискоренням від початку пуску до проходження точки критичного ковзання. Таке інтенсивне прискорення ротора двигуна і, відповідно, приводного барабана конвеєра створює несприятливі умови по експлуатації конвеєрної стрічки. Так, наявність пружної ланки, як конвеєрна стрічка при інтенсивному розгоні приводного барабана веде до появи пружніх хвиль деформації, значних багаторазово повторюваних динамічних перевантажень в тяговому органі в процесі пуску конвеєра (рис. 1.1) [1].
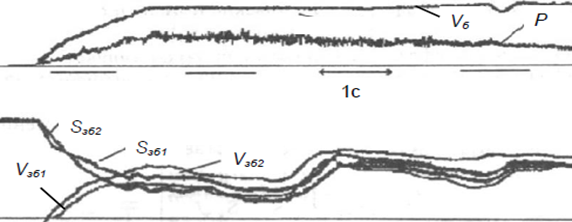
Рисунок 1.1 – Осцилограмми параметрів пуску стрічкового конвеєра 1Л100К-1 при безпосередньому підключенні приводного двигуна потужністю 100 кВт до мережі [11]:
Vб – швидкість барабана конвеєра; Vзб1; Vзб2 – швидкість ділянки стрічки, що збігає з барабана (параметри 1-го та 2-го датчиків); Sзб1; Sзб2 – розтяжне зусилля в ділянці стрічки, що збігає з барабана (параметри 1-го та 2-го датчиків); P – потужність двигуна
Цей недолік може бути усунутий за допомогою регулювання швидкостей асинхронного двигуна.
1. Актуальність теми
Відсутність ефективних засобів регулювання швидкості обмежує функціональні можливості приводу, обумовлює підвищений знос його елементів у зв'язку з високою інтенсивністю розгону. Тому завдання створення регульованого електроприводу гірничих машин має наукову і практичну актуальність.
Засоби впливу на швидкісний режим асинхронного двигуна (АД) такі як імпульсне, реостатне, каскадне регулювання також можуть бути в принципі використані для забезпечення більш прийнятних технічних характеристик електроприводу гірничих машин. Однак, доцільність їх застосування повинна бути обгрунтована у кожному окремому випадку. У цілому основу силових напівпровідникових пристроїв керування швидкістю АД, які відносяться до найбільш поширених технічних засобів, складають силові напівпровідникові ключові схеми. При цьому транзисторні ключі відрізняються поліпшеною функціональністю, оскільки не вимагають застосування спеціальних пристроїв примусового відключення в колах постійного струму. Тому завдання застосування силових транзисторних перемикачів схем пристрою плавного пуску електропривода гірських машин становить найбільший практичний інтерес.
2. Мета і задачі дослідження
Метою дослідження є підвищення ефективності експлуатації шахтного стрічкового конвеєра шляхом застосування засоби автоматизації пуску виконаного за рахунок наукового обгрунтування параметрів транзисторного регулятора.
Основні завдання дослідження:
- Виконати аналітичний огляд досліджень і розробок в галузі управління пуском;
- Розробити математичну і комп'ютерну моделі системи "транзисторний регулятор – асинхронний двигун", а також дослідити і проаналізувати процеси в ній;
- Обгрунтувати та розробити структурну і принципову схему засобу автоматизації пуску стрічкового конвеєра;
- Обгрунтувати вимоги з безпечної експлуатації розробленого засобу автоматизації.
Об'єкт дослідження: шахтний стрічковий конвеєр
Предмет дослідження: асинхронний двигун приводу стрічкового конвеєра.
3. Аналіз відомих способів і пристроїв управління швидкісним режимом асинхронного електроприводу шахтних стрічкових конвеєрів
Для того, щоб зменшити вплив несприятливих процесів, що виникають при безпосередньому підключенні двигуна до мережі застосовують різні способи управління швидкісним режимом двигуна. Нижче наведені основні способи керування швидкістю двигуна.
3.1 Реостатне регулювання кутової швидкості АД
Спосіб реостатного регулювання кутової швидкості АД стосується тільки машин з фазним ротором і реалізується підключенням групи зовнішніх резисторів в ланцюг трифазної роторної обмотки двигуна. В основному, цей спосіб застосовується для управління режимом розгону (уповільненням розгону) двигуна шляхом поступового закорочення окремих секцій додаткових роторних резисторів. Наявність цих резисторів призводить до збільшення нахилу механічної характеристики двигуна, в результаті, зростає його пусковий момент.
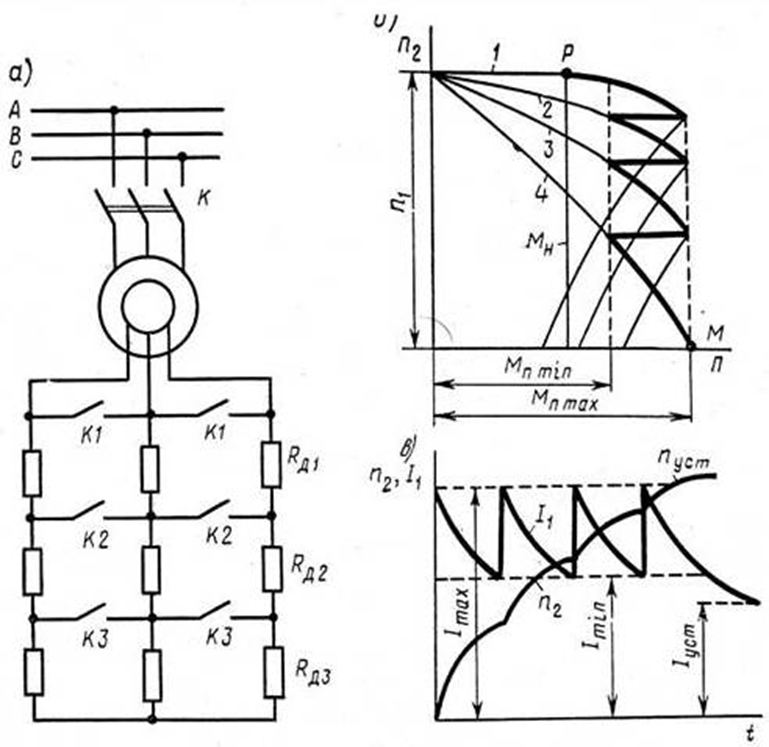
Рисунок 3.1 – Схема включення асинхронного двигуна при реостатному пуску (а), його пускова діаграма (б), графіки зміни частоти обертання та струму (в) [12].
Переваги реостатного регулювання швидкісного режиму: дешевизна обладнання, простота експлуатації.
Недоліки: мала економічність, оскільки енергія ковзання ротора в процесі значною мірою перетворюється на теплову енергію нагріву додаткових роторних резисторів.
3.2 Управління швидкісним режимом за допомогою каскадних схем регулювання швидкості АД
Принцип регулювання швидкості асинхронного двигуна в каскадних схемах полягає у введенні в роторний ланцюг доданої ЕРС. Струм ротора в цьому випадку визначається різницею векторів ЕРС ротора і додаткової: змінюючи величину додаткової ЕРС можна регулювати струм ротора, а, отже, і момент двигуна, і в кінцевому підсумку, швидкість.
Виходячи з зручності практичної реалізації, найбільш доцільно в ланцюзі ротора підсумовувати не трифазну змінну ЕРС, а ЕРС постійного струму. З цією метою в ланцюг ротора двигуна включається випрямляч. Джерелом додаткової ЕРС може служити або машина постійного струму (машинно-вентильний каскад), або статичний перетворювач, підключений до мережі живлення (вентильний каскад).
В АВК енергія ковзання спочатку перетвориться в енергію постійного струму, а потім інвертором АІ1 в енергію змінного струму фіксованої частоти. Трансформатор ТV1 призначений для узгодження вихідної напруги інвертора з напругою мережі. Для регулювання швидкості АВК необхідно змінювати величину ЕРС інвертора на стороні постійного струму за рахунок зміни кута відкривання тиристорів β.
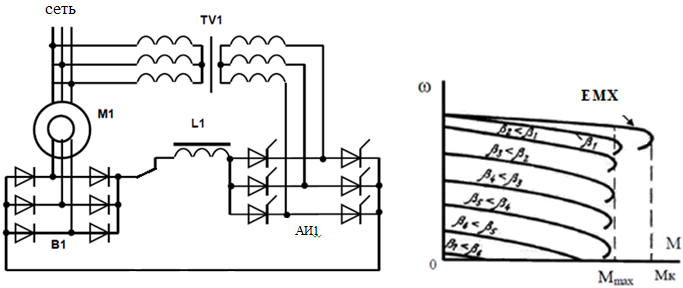
Рисунок 3.2 – Схема підключення та механічні характеристики асинхронного двигуна (М1) з фазним ротором при регулюванні кутової швидкості схемою асинхронного вентильного каскаду [11].
Таким чином, каскадні способи дозволяють регулювати величину кутової швидкості асинхронного двигуна в широкому діапазоні, підтримувати досить високу жорсткість механічних характеристик і відрізняються можливістю повернення частини енергії ковзання ротора в живильну мережу.
3.3 Управління швидкістю АД з допомогою перетворювача частоти
Структурно перетворювач частоти представлений перетворювачем з ланкою постійного струму, представлений випрямлячем 1 і ємнісним фільтром 2 на виході (рис. 3.3) [2]. Напруга змінної частоти формується автономним інвертором напруги 3 і подається на асинхронний двигун споживача через згладжувальний дросель 4. У процесі формування трифазної системи вихідних напруг перетворювача застосовується принцип широтно-імпульсної модуляції.
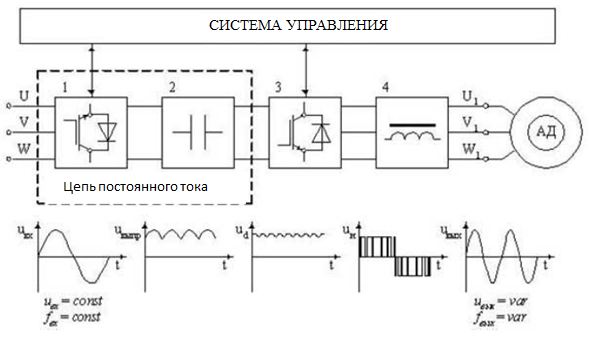
Рисунок 3.3 – Блочно-структурна схема перетворювача частоти [11].
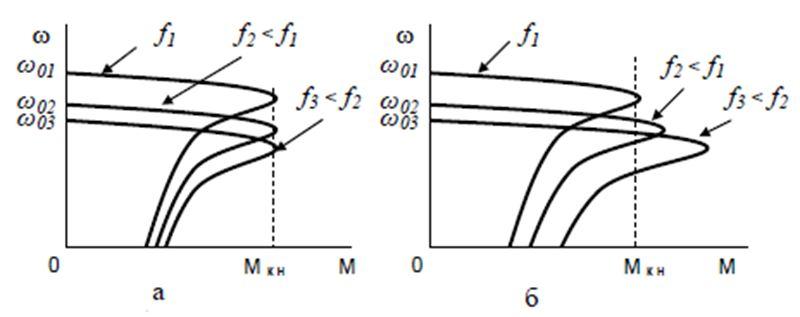
Рисунок 3.4 – Механічні характеристики асинхронного двигуна при частотному управлінні швидкісними режимами а) Uф / f = const;
б) Uф = const [13]
Як видно з механічних характеристик двигуна частотний метод управління швидкісним режимом супроводжується деякими недоліками, тому що зменшення частоти при не змінній величині напруги живлення призведе до істотного збільшення моменту двигуна, що є небезпечним щодо пошкодження механічних елементів трансмісії і має супроводжуватися підвищеним споживаним струмом через зменшення індуктивних опорів двигуна. У разі, якщо збільшити частоту напруги живлення асинхронного двигуна до величини, що перевищує частоту мережі, то для забезпечення номінального критичного моменту необхідно підвищення величини цієї напруги живлення. В умовах промислового підприємства це вимагає застосування спеціальної трансформаторної підстанції, розрахованої на формування вихідної напруги підвищеної величини, і, відповідно, розрахованих на це напруги силової комутаційної апаратури та апарату захисту (зокрема, від витоку струму на землю). Робота перетворювача частоти також супроводжується наявністю високочастотних складових у спектрі вихідних напруг інвертора, яка зумовлює істотне зменшення ємнісного опору ізоляції мережі струмів цих частот і утворює додаткову небезпеку електропоразки (рис. 3.5) [2; 3; 4; 5]. Крім того, при виникненні витоку струму на землю в ланцюзі постійного струму між мережею та землею виникає додаткове джерело постійної напруги, струм якої може значно перевищити величину оперативного струму апарата захисту (АЗ) від витоку струму на землю і цим блокувати його роботу.
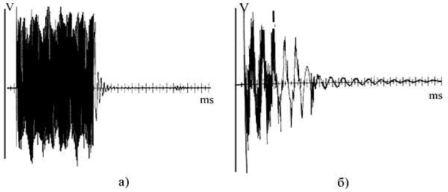
Рисунок 3.5 – Осцилограми струму витоку на землю в дільничній мережі з перетворювачем частоти при частоті його вихідної напруги 5 Гц (а) і 70 Гц (б) [2]
Таким чином, експлуатація частотно-керованого асинхронного електропривода в умовах шахти можлива тільки за умови застосування спеціально адаптованого апарата захисту від витоків струму на землю.
Переваги частотного способу регулювання швидкості двигуна: простота реалізації; можливість використовувати розімкнуті схеми управління для установок, уповільнення пуску яких не передбачає дотримання заданої діаграми швидкості при коливаннях моменту.
Однак, в такому способі регулювання є істотний недолік: наявність сукупності високочастотних складових у спектрі вихідних опорів інвертора обумовлює істотне зменшення ємнісного опору ізоляції мережі і створює додаткову небезпеку ураження електрикою. Крім того, при виникненні витоків струму на землю в ланцюзі постійного струму між мережею та землею виникає додаткове джерело постійної напруги, струм якого може значно перевищити величину оперативного струму апарата захисту від витоків струму на землю і цим буде блокувати його роботу.
3.4 Управління швидкістю АД з допомогою імпульсного регулювання електричних параметрів
Для керування швидкістю АД також можна застосувати систему імпульсного регулювання, яка поєднує в собі компоненти реостатного регулювання. Робота схеми грунтується на застосуванні транзисторного регулятора напруги в ланцюзі статора приводного асинхронного двигуна.
Сутність імпульсного регулювання полягає в періодичному (імпульсному) зміні параметрів ланцюгів АД або живильної мережі. Стосовно до асинхронного ЕП найчастіше здійснюється імпульсна зміна напруги,що підводиться до АД або опорів резисторів в ланцюгах ротора або статора. Ці способи застосовуються головним чином для регулювання швидкості, хоча при необхідності вони дозволяють регулювать (обмежувати) струм і момент АТ. Приклади імпульсних регуляторів швидкості в ланцюзі ротора наведено на рис. 3.6.
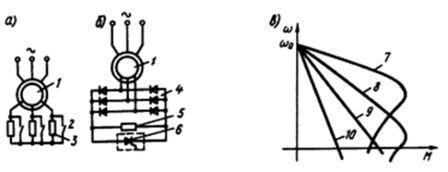
Рисунок 3.6 – Пристрій імпульсних регуляторів швидкості (а, б) і механічні характеристики приводу (в) [14]
Імпульсне регулювання напруги на статорі АД може бути реалізовано за допомогою тиристорного або транзисторного регулятора напруги. У цьому випадку реалізуються штучні механічні характеристики, аналогічні зображеним на рис. 3.7.
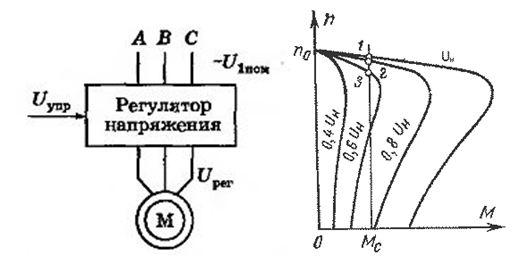
Рисунок 3.7 – Структурна схема та механічні характеристики АД при використанні імпульсного регулювання в ланцюзі статора [15].
Для реалізації заданої діаграми швидкості необхідна зворотній зв'язок з двигуном. Однак, існує суперечність за умовою швидкодії реакції схеми тиристорного регулятора напруги на команди системи управління, у зв'язку зі специфікою замикання тиристорів. У той же час транзисторні пристрої плавного пуску мають вищі порівняно з тиристорними енергетичні показники і дозволяють реалізовувати задані алгоритми управління пуском без прив'язки до моменту переходу напруги мережі через нуль, що дозволяє виробляти вихідний сигнал синусоїдальної форми з мінімальними відхиленнями.
Транзистори є повністю керованими приладами і за своїми технічними характеристиками поділяються на біполярні, біполярні з ізольованим затвором (англ. IGBT), польові (англ. MOSFET) і польові зі статичної індукцією (англ. SIT). Найбільше поширення в силових транзисторних перетворювачах отримали транзистори типу IGBT, що поєднують в собі позитивні властивості біполярного (низькі втрати потужності у включеному стані) і польового (високий вхідний опір) транзисторів.
Для поліпшення показників регулювання координат АД імпульсним способом створюються замкнуті ЕП з використанням різних зворотних зв'язків.
Структурна схема, складена на підставі опису об'єкта дослідження, представлена на рис. 3.8.
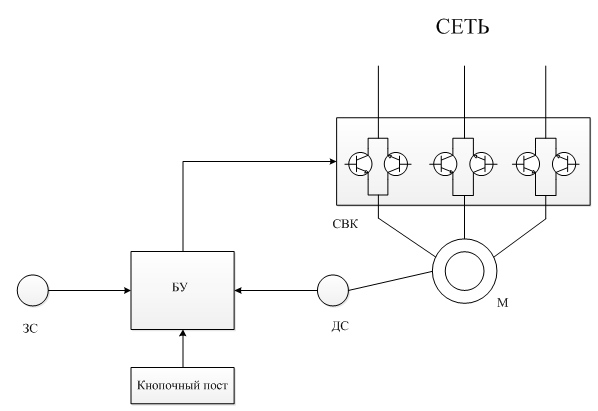
Рисунок 3.8 – Структурна схема транзисторного регулятора напруги
Принцип работи схеми транзисторного регулятора напруги у ланці статора можна побачити на рис. 3.9.
Рисунок 3.9 – Принцип работи схеми транзисторного регулятора напруги
(анімація: 11 кадрів, 5 циклов повторення, 49 кілобайт)
де 1 – блок управління; 2 – задатчик швидкості; 3 – датчик швидкості; 4 – силовой транзисторний ключ; М – асинхронний двигун
4. Обгрунтування структури моделі дослідження процесів при імпульсному управлінні асинхронним електроприводом
Для того щоб краще зрозуміти фізичні процеси, що відбуваються в АКЗ, досліджуємо машину нерухомій системі координат, зробимо деякі висновки, необхідні при побудові електроприводу на базі цієї машини. Також необхідно врахувати, що для представлення просторових векторів використовується комплексна площину.
У нерухомій комплексній системі координат (ωк = 0, αк = 0) речова вісь позначається через α, а уявна через β. Просторові вектори в цьому випадку розкладаються по осях:

Підставивши ці значення в рівняння, що описують електропривод і прирівнявши окремо речові і уявні частини, отримаємо [8]:
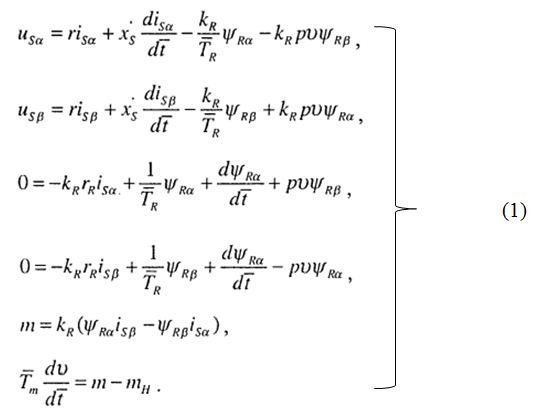
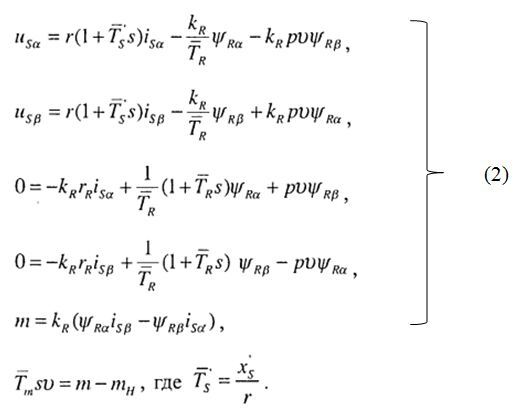
Система уравнений (1) в операторной форме имеет вид [8]:
На вхід моделі в момент часу  0 подаються напруги
0 подаються напруги 
 тим самим реалізуючи прямий пуск.
тим самим реалізуючи прямий пуск.
Осцилоскопи вимірюють відносні значення електромагнітного моменту і швидкості. Результати моделювання представлені на рис. 4.2. Вони показують, що при прямому пуску спочатку спостерігаються значні коливання моменту. Такі ж колебання спостерігаються в струмі і швидкості. Крім того, вони показують, що при додатку моменту навантаження спостерігається зменшення швидкості.
За допомогою розробленої моделі відтворимо графічно поведінку системи асинхронного двигуна в процесі пуску.
Структурна схема досліджуваної системи складеної в MatLab наведена на рисунку 4.1
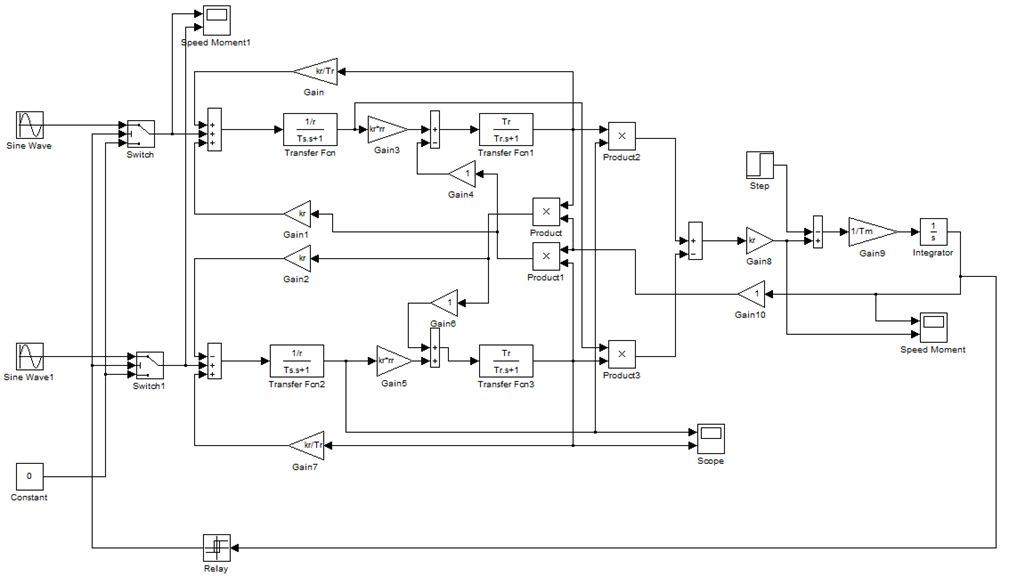
Рисунок 4.1 – Структурная схема асинхронного двигуна в процесі пуску
У схемі (рис. 4.1) в якості системи управління транзисторними ключами виступає реле, яке подає сигнал на відключення транзисторів при досягненні двигуном заданої швидкості
Отримані в результаті моделювання швидкість двигуна і момент наведено на рис. 4.2.
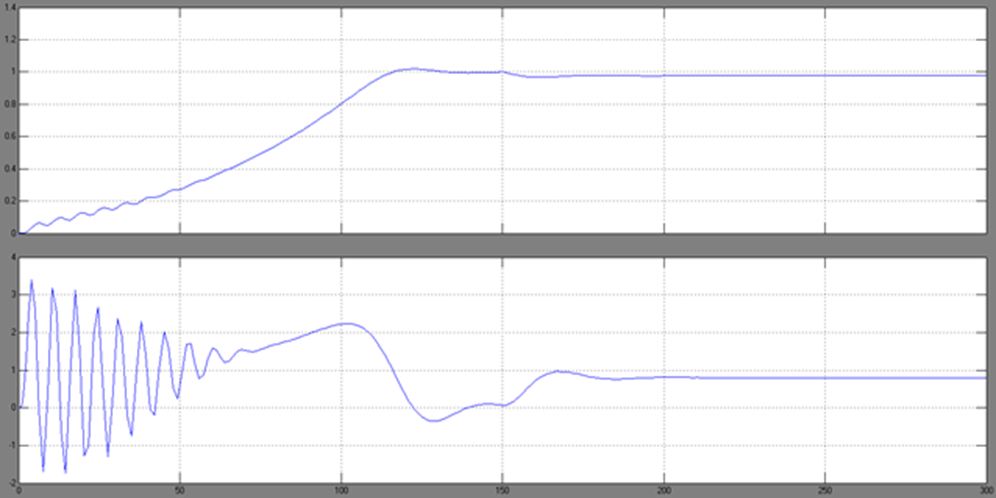
Рисунок 4.2 – Діаграми швидкості і моменту двигуна в момент пуску
За допомогою імпульсного управління можна підтримувати двигун на заданому рівні швидкості. Також за допомогою введення в схему додаткових блоків надалі можливе задання більш плавною діаграми пуску, що дозволить збільшити час пуску і знизити момент на валу двигуна при пуску.
Таким чином, створена і випробувана модель, що дозволяє оцінити функціональні властивості імпульсного управління АТ і може бути врахована при проектуванні відповідних пристроїв.
Перелік посилань
- Савицкий В.Н. Защита от токов утечки в комбинированных распределительных сетях угольных шахт / В.Н. Савицкий, Н.И. Стадник – 13 с.
- Маренич К.Н. Асинхронный электропривод горной машины. Корректировка пусковых параметров / К.Н. Маренич; Сб. науч. тр. горно-электромеханического факультета. – Донецк: ДонГТУ, 1996. – с.176-177.
- Киампо Е.М. Токи утечки в комбинированной электрической сети горных машин / Е.М. Киампо, В.А. Коровкин; Известия вузов. Горный журнал. – 1986. – №2. – с.97-99.
- Белошистов А.И. Проблемы защиты от утечек тока на землю распределительных сетей угольных шахт, содержащих силовые полупроводниковые элементы / А.И. Белошистов, В.Н. Савицкий // Взрывозащищенное электрооборудование: Сб. науч. тр. УкрНИИВЭ. – Донецк: ООО «Юго-Восток, Лтд», 2004. – с. 78-83.
- Колосюк В.П. Токи утечки на землю в системе электроснабжения комбайнов с регулируемым приводом / В.П. Колосюк, Ю.В. Товстик // Уголь Украины. – 2005. – №6. – с. 35-39.
- Ставицкий В.Н., Маренич К.Н. Полупроводниковый преобразователь для автоматизированного электропривода горной машины. // Наукові праці Донецького національного технічного університету. Серія: обчислювальна техніка та автоматизація. Випуск 58. – Донецьк: ДонНТУ, 2003. – с. 122-129
- Груба В.И. Технические средства автоматизации в горной промышленности: Учебное пособие / В.И. Груба, Э.К. Никулин, А.С. Оголобченко. – К.: ИСМО, 1998. – 373 с
- Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в Matlab 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2001. – 320 с., ил.
- Копылов И.П. Математическое моделирование электрических машин: Учеб. для вузов по спец. «Электрич. мишины». – М.: Высш. шк., 1987. – 284 с.:ил.
- Маренич К.Н. А.С. 1824835 СССР, МКИ В65С23/00 Способ управления пуском шахтного ленточного конвейера и устройство для его осуществления. К.Н. Маренич, С.В. Дзюбан, И.Т. Сидоренко и др. (СССР), опубл. 05.02.1990
- Маренич К.Н. Автоматизированный электропривод машин и установок шахт и рудников: Учебное пособие / К.Н. Маренич, Ю.В. Товстик, В.В.
- Слайд 31 из презентации «Асинхронный двигатель» к урокам физики на тему «Электричество». Режим доступа: http://900igr.net/prezentatsii
- Битюцкий А.Ю. Исследование принципа квазичастотного управления асинхронным электроприводом в контексте задачи автоматической расштыбовки скребкового конвейера. Автореф. магистерской работы. [Электронный ресурс] – Режим доступа: Портал магистров ДонНТУ, Факультет КИТА, 2012 г.
- Москаленко В.В. Электрический привод: Учебное пособие / В.В. Москаленко. – 2-е изд., стер. – М.: Издательский центр «Академия», 2004. – 368 с.
- Электронный ресурс «Школа для электрика». Режим доступа: http://electricalschool.info