
Computer systems and networks
Maneuvering theory: assumes that the ship is moving in restricted calm water, e.g. in sheltered waters or in a harbor. Hence, the ship model is derived for a ship moving at positive speed U under a zero-frequency assumption such that added mass and damping can be represented by using hydrodynamic derivatives.
Seakeeping analysis is used in operability calculations to obtain operability diagrams according to the adopted criteria. It also refers to the motions of a vessel in waves usually at a specific speed (included station-keeping, i.e. zero speed) and heading in a sinusoidal, irregular or random seaway – frequency-dependent added mass and damping[1].
The Principle of Guidance, Navigation and Control.
Guidance: is the action or the system that continuously computes the reference (desired) position, velocity and acceleration of a vessel to be used by the control system. These data are usually provided to the human operator and the navigation system.
The basic components of a guidance system are motion sensors, external data like weather data (wind speed and direction, wave height and slope, current speed and direction, etc.) and a computer.
The computer collects and processes the information, and then feeds the results to the vessel's control system. In many cases, advanced optimization techniques are used to compute the optimal trajectory or path for the vessel to follow. This might include sophisticated features like fuel optimization, minimum time navigation, weather routing, collision avoidance, formation control and schedule meetings [6].
Navigation: is the science of directing a craft by determining its position, course, and distance traveled.
In some cases velocity and acceleration are determined as well. This is usually done by using a satellite navigation system combined with motion sensors like accelerometers and gyros.
The most advanced navigation system for marine applications is the inertial navigation system (INS).
Navigationis derived from the Latin navis, "ship", and agere, "to drive." It originally denoted the art of ship driving, including steering and setting the sails. The skill is even more ancient than the word itself, and it has evolved over the course of many centuries into a technological science that encompasses the planning and execution of safe, timely, and economical operation of ships, underwater vehicles, aircraft, and spacecraft [6].
Control is the action of determining the necessary control forces and moments to be provided by the vessel in order to satisfy a certain control objective. The desired control objective is usually seen in conjunction with the guidance system. Examples of control objectives are minimum energy, set-point regulation, trajectory tracking, path following, maneuvering etc. [7].
Heavy traffic example of water transport is shown in Figure 1.

Figure 1 – Heavy traffic example of water transport [13]
The main objective is to create a 3D model of the ship, which will move in accordance with the mathematical model movement of the ship. Since this requires large computing resources, the task will be performed using parallel techniques.
Scientific novelty is the application of CUDA technology for the task.
From the viewpoint of kinematic vessel may be considered as a rigid body in six degrees of freedom [10,8]. The equations of motion of the ship are composed under the laws of kinematics and dynamics of rigid bodies, as well as the theory of force action on a moving body fluid [18].
To study the movement of the ship on the free surface, the following basic coordinate system [10, 17]: are used
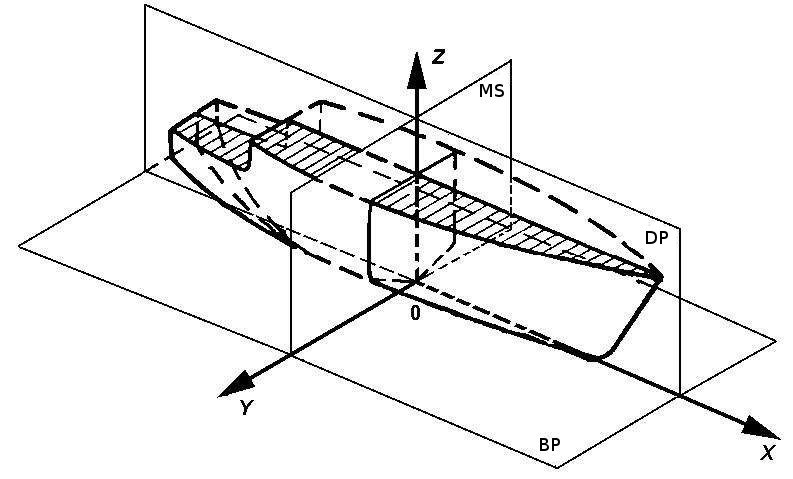
Figure 2 – The main planes of the vessel
If a ship at the initial motion is in equilibrium, then the coordinate system and Orhn Oxyz match.
Conversion from the fixed coordinate system to movable one is performed by the following transfer matrix η:
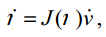
where
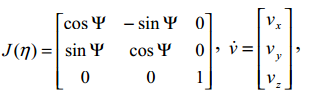
where v – velocity vector; vx, vy, vz – the projection of the velocity vector of the vessel (Fig. 3); Ψ – the ship's course.
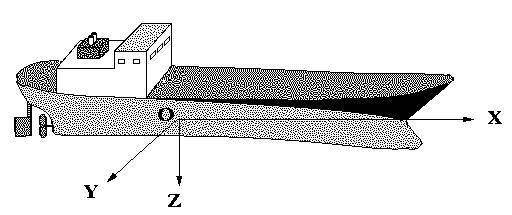
Figure 3 – The coordinate system of the vessel
Request more information about the ship motion model in the author's papers [14,19,20].
To calculate the trajectory of the vessel large computational power is required. Therefore for settlement coordinate parallel programming technology NVIDIA CUDA is used [9,11,12,23].
The second part of the work - a visualization of the results. To do this, create a three-dimensional model of the object (ship). This object will move in a path, calculated by the mathematical model.
For visualization of the vessel Java2D [21] is used. Language JAVA [22] was chosen because of its convenience and flexibility. Another important factor: JAVA-applications are cross-platform.
On Figure 4 a simplified three-dimensional model of the ship is shown.
Figure 4 – A simplified three-dimensional model of the ship
(animation: 15 frames, 3 cycles of recurrence, 83 kilobytes)
The task of water traffic managing is relevant. To solve it, high-quality, sophisticated, accurate mathematical models are needed, which describe the motion of each object. Often it is necessary to take into account the shape and minor details of objects, for example, when they are a small distance from each other.
This will require a 3D-model of each participant of water traffic. All this requires big computing resources.
The next steps was carried out:
A lot of work is necessary to do this aim. Therefore, the task is shared between two students on two subtasks:
My part of the work involves visualization. The next objectives are set out:
Jcuda technology makes available the advantages of CUDA if we development the main part of the project on customary for many language JAVA. I see this as the advisability of its use.
JAVA - is a powerful, modern, popular language, which has a lot of advantages. It is well suited to carry out my master's work. In addition, the use of JAVA language is conditioned by the department recommendations and my personal preference.
In writing this essay master's work is not yet complete. Final completion: December 2013. Full text of the work and materials on the topic can be obtained from the author or his supervisor after that date.