
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Особливості побудови цифрових систем керування електроприводом
- 2. Пристрій реєстрації сигналів на основі апаратної обчислювальної платформи Arduino
- 2.1. Актуальність проблеми
- 2.2. Цілі і завдання дослідження
- 2.3. Апаратна частина
- 2.4. Програмна частина
- 3. Розробка експериментального стенду для дослідження цифрових систем управління двигуном постійного струму на базі високошвидкісної PC сумісної плати розширення 5710
- 3.1. Структура стенду
- 3.2. Огляд тиристорних перетворювачів серії БТУ
- 3.3. Двигуни постійного струму
- 3.4. Керуюча частина
- 3.5. Програмна частина
- 3.6. Модель системи автоматичного управління ДПТ
- Висновки
- Список джерел
Вступ
У системах управління електроприводом використовується два основних способи обробки інформації: аналоговий і цифровий. На даний момент цифрова обробка сигналів майже повністю витіснила аналогову. Прогрес у цій області спричинений досягненнями в мікроелектроніці, що дозволили створити обчислювальні засоби, що володіють високою швидкодією, малими габаритами, вагою і енергоспоживанням. Інтерес до цифрової обробки сигналів викликаний тим, що на її основі можна створювати пристрої з характеристиками, недосяжними при використанні аналогових методів. Крім того, застосування пристроїв з цифровою обробкою у ряді випадків виявляється більш вигідним з технічної та економічної точок зору через їх універсальності і можливості працювати в різних режимах.
Метою даної роботи є розробка цифрових засобів формування керуючих впливів і обробки сигналів стосовно до систем управління електроприводом. Робота складається з двох етапів:
- Розробка пристрою реєстрації сигналів на основі апаратної обчислювальної платформи Аrduino
- Створення експериментального стенду для дослідження цифрових систем керування двигуном постійного струму на базі високошвидкісної PC сумісної плати розширення АЦП/ЦАП 5710 Octagon systems.
1. Особливості побудови цифрових систем керування електроприводом
До цифрових систем управління (ЦСУ) відносяться системи, що складаються з цифрових елементів. Термін цифровий елемент
(ЦЕ)
означає певну конструктивну електротехнічну одиницю дискретної дії, що виконує різні функції – логічні, обчислювальні,
перетворюючі, запам'ятовування сигналів. У складі ЦСУ цифрові елементи утворюють вузли, які виконують ті чи інші завдання управління.
На рис. 1 наведена схема ЦСУ деякої координатою х електроприводу, де ЦЗУ – цифровий керуючий пристрій, ЦС – цифровий суматор,
ЦР – цифровий регулятор, ЦАП – цифроаналоговий перетворювач, АЦП – аналогово-цифровий перетворювач , УП-Д – система керований
перетворювач – двигун, в якій УП є вихідною виконавчої частиною СУЕП.
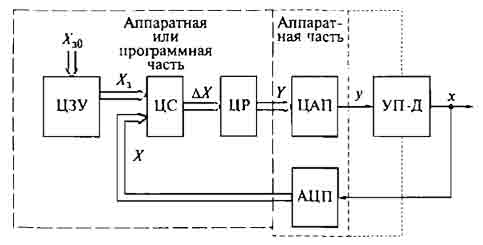
Рисунок 1 – Схема цифрової системи керування електроприводом
Дана схема ЦСУ за своєю структурою аналогічна безперервної СУЕП з тими ж функціональними вузлами, крім ЦАП і АЦП, але виконаними на аналогових елементах.
Переваги ЦСУ визначаються достоїнствами цифрових елементів у порівнянні з аналоговими – великими перешкодостійкістю і точністю датчиків швидкості та положення, простотою і зручністю цифрового завдання програми на рухи електроприводу, неухильної тенденцією до зниження габаритів і вартості ЦЕ, до підвищення надійності і ступеня інтеграції цифрових вузлів.
Функціональні вузли ЦСУ, показані на рис. 1, можуть бути реалізовані двояко:
- Апаратно – кожен функціональний вузол являє собою самостійний окремий блок у складі ЦСУ, виконаний на мікросхемах малої і середньої ступені інтеграції;
- Програмно – функціональні вузли виконуються на комп'ютері або мікроконтролері, і алгоритм їх функціонування визначається програмою роботи цього пристрою.
Для зміни алгоритму управління ЦСУ при апаратному способі потрібна заміна відповідних блоків управління. При програмному способі для зміни алгоритму управління потрібна лише зміна програми на тій же елементній базі. Такі ЦСУ знаходять широке застосування в електроприводах виробництв, де можливі зміни технологічних процесів, отже, потрібні зміни і в завданнях управління верхнього рівня. Завдяки швидкому вдосконаленню сучасної технології виготовлення мікропроцесорних пристроїв, підвищенню їх якості та зниження вартості програмний спосіб глибоко увійшов в системи управління електроприводів [1].
2. Пристрій реєстрації сигналів на основі апаратної обчислювальної платформи Arduino
2.1. Актуальність проблеми
При проектуванні систем автоматичного керування електроприводом часто виникає необхідність комп'ютерної обробки аналогових сигналів датчиків швидкості, струму, напруги, положення, що передбачає отримання чисельних значень сигналів за допомогою аналогово-цифрового перетворювача (АЦП). Надалі цифрові сигнали можуть бути використані для організації зворотних зв'язків у системі регулювання, або ж для графічного відображення стану об'єкта регулювання. Розробка недорогого пристрою реєстрації сигналів, яке можна використовувати у навчальній та науково-дослідних робіт, представляє досить велику актуальність.
2.2. Цілі і завдання дослідження
Метою даного етапу роботи є розробка та створення пристрою реєстрації аналогових сигналів низької частоти у вигляді напруги, що змінюється в діапазоні напруг ±10В. Такий пристрій зручно використовувати в якості цифрового осцилографа для сигналів датчиків напруг, струму, тахогенераторів.
2.3. Апаратна частина
Для вирішення поставленої задачі була використана плата АЦП, реалізована на основі платформи Arduino [2], яка в даний час користується великою популярністю завдяки зручності і простоті мови програмування, відкритій архітектурі і програмному коду. Існує кілька версій платформ Arduino, що відрізняються, в основному, типом використовуваного мікроконтролера сімейства ATmega. Принципово може бути використана будь-яка з версій платформ, але, строго кажучи, далеко не всі можливості платформи будуть при цьому використані. Крім реєстрації сигналів, за допомогою Arduino можна також організувати і формування керуючих сигналів, використовуючи виходи, що підтримують ШІМ. Крім того, можлива програмна реалізація цифрових регуляторів або фільтрів будь-якого ступеня складності.
Нижче наведемо опис розробленого 4-канального цифрового реєстратора на базі платформи Arduino Mega (рис.2), що використовує мікроконтролер ATmega2560. Для роботи необхідно підключити плату Arduino Mega до порту USB персонального комп'ютера.

Рисунок 2 – Плата ArduinoMega
Аналогові входи Arduino розраховані на напругу від 0 до 5 В, тому вхідні сигнали повинні бути попередньо нормовані, для чого передбачена окрема плата. На платі нормування сигналів реалізовані инвертуючі схеми підсилення на базі операційних підсилювачів (ОУ) зі зміщенням сигналів по рівню. Для живлення ОУ використаний двуполярний блок живлення ±12,5 В (на основі 2 однополярних блоків).
На рис. 3 представлений зовнішній вигляд розробленого пристрою. Для одночасного нормування чотирьох сигналів використовується мікросхема TL074CN, в якій об'єднані чотири ОУ.
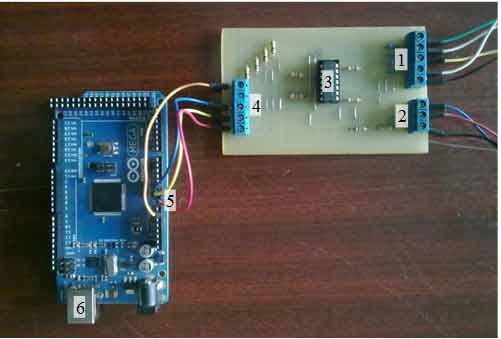
Рисунок 3 – Загальний вигляд пристрою реєстрації на базі Arduino Mega: 1 – вхідні клеми плати нормування (4 входу і GND); 2 – клеми живлення (+12,5 В, -12,5 В і GND); 3 – мікросхема TL074CN; 4 – вихідні клеми плати нормування(4 виходи і GND); 5 – аналогові входи Arduino (A0, A1, A2, A3 і GND); 6 – USB-порт для підключення до комп'ютера.
Принцип роботи пристрою реєстрації показує наступна схема:
Рисунок 4 – Принцип роботи пристрою реєстрації (анімація: 8 кадрів, 547 кбайт)
2.4. Програмна частина
Програмна частина проекту реалізована в середовищах розробки Arduino і Processing. Програма, яка відповідає за прийом числових даних на комп'ютері, написана в середовищі розробки Arduino IDE [3] – додатку на Java, що включає в себе редактор коду, компілятор і модуль передачі прошивки в плату.
Програма візуалізації написана на відкритій мові програмування Processing [4], заснованій на Java; лістинг програми тут не наводиться.
На рис. 5 наведено приклад реєстрації трьох сигналів (напруга задатчика інтенсивності, швидкості та струму якоря двигуна постійного струму) за допомогою розробленого пристрою.
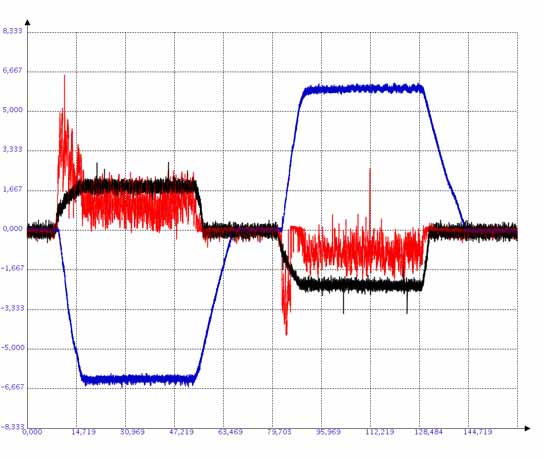
Рисунок 5 – Вікно програми реєстрації
3. Розробка експериментального стенду для дослідження цифрових систем управління двигуном постійного струму на базі високошвидкісної PC сумісної плати розширення 5710
3.1. Структура стенду
Силова частина стенду складається з двох двигунів постійного струму серії ПБСТ-32 з вбудованими тахогенератором, двох реверсивних тиристорних перетворювачів серії БТУ і релейно-контакторною системи управління.
Керуюча частина являє собою панель вимірювальних приладів, персональний комп'ютер з вбудованою високошвидкісний платою розширення АЦП / ЦАП 5710 Octagon systems, а також вхідні і вихідні гальванічні розв'язки.
Принципова схема стенду представлена на рисунку 6.
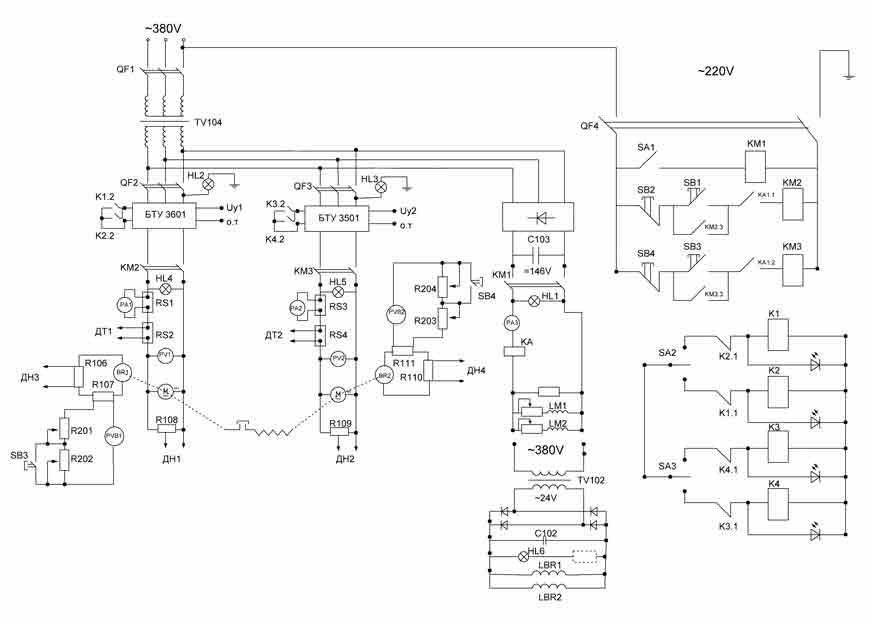
Рисунок 6 – Принципова схема стенду
3.2. Огляд тиристорних перетворювачів серії БТУ
У даній роботі використовуються реверсивні тиристорні перетворювачі БТУ-3501 і БТУ-3601. Їх пристрої подібні, тому розглянемо структуру одного з них – БТУ-3601.
Тиристорний перетворювач БТУ-3601 призначений для регулювання швидкості обертання як звичайних двигунів постійного струму з незалежним порушенням, так і високомоментних електродвигунів.
Силова частина перетворювача (рис. 7) складається з двох трифазних мостових комплектів тиристорів, що працюють за принципом роздільного управління. Підключення перетворювача до силової мережі проводиться через узгоджувальний трансформатор. Реверс випрямленої напруги досягається за рахунок антипаралельного з'єднання двох трифазних мостових комплектів тиристорів. При роботі одного комплекту пристрій логіки забороняє подачу імпульсів управління на інший. Специфікою роботи трифазної мостової керованої схеми випрямлення в області переривчастого струму є необхідність формування здвоєних імпульсів для управління тиристорами.
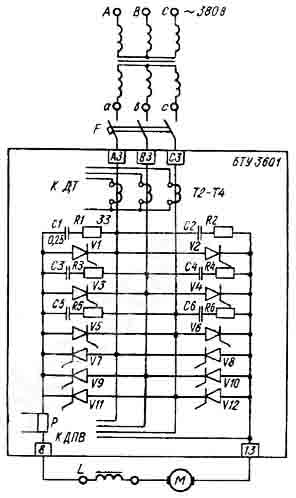
Рисунок 7 – Принципова схема силової частини БТУ-3601
Функціональна схема БТУ-3601 представлена на рисунку 7.
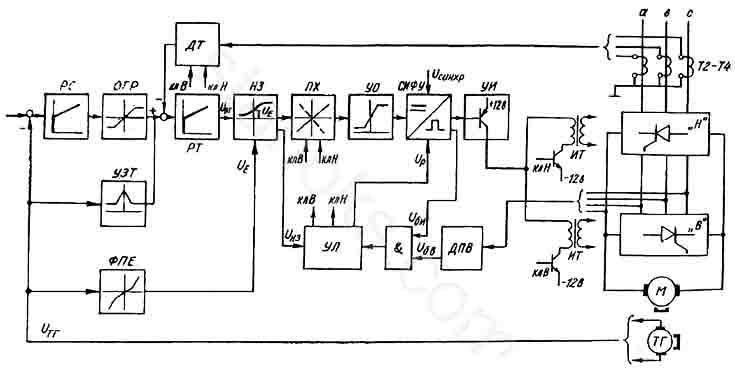
Рисунок 8 – Функціональна схема БТУ-3601
Керуюча частина перетворювача (рис.8) містить набір аналогових регуляторів, а також датчиків швидкості і струму, але в даній роботі вони не використовуються, тому що сигнал управління подається прямо на нелінійну ланку (НЗ). Коефіцієнт передачі НЗ має залежність, зворотний коефіцієнту передачі тиристорного перетворювача в зоні переривчастого струму.
Різнополярна напруга управління нелінійної ланки перетворюється перемикачем характеристик (ПХ) в однополярну. Таким чином, в статичному режимі роботи приводу на керуючий орган СІФУ (УО) подається тільки негативна полярність напруги, незалежно від працюючого комплекту тиристорів.
Керуючий орган СІФУ забезпечує обмеження мінімального і максимального кутів регулювання, установку початкового кута регулювання.
СІФУ виробляє імпульси управління для тиристорів. Фазовий зсув імпульсів відносно силової напруги на тиристорах пропорційний напрузі, яка подається на СІФУ від УО.
Підсилювачі імпульсів (УІ) узгоджують за потужністю вихід СІФУ з імпульсними трансформаторами. Крім цього, на УІ відбувається здвоювання імпульсів.
Логічний пристрій роздільного управління (ВУЛ) служить для формування сигналів кл.В і кл.Н, керуючих ключами В і Н в датчику струму, перемикачі характеристик і ланцюги імпульсних трансформаторів. Командою для ВУЛ на перемикання комплектів є зміна полярності сигналу на виході НЗ.
Контроль відсутності струму через тиристори проводиться датчиком провідності вентилів (ДПВ).
Елемент І здійснює логічне множення блокувальних сигналів і має на виході логічний сигнал одиничного рівня в той проміжок часу, коли відсутні струм через тиристор і керуючий імпульс на тиристорі.
При появі команди на перемикання комплектів і наявності на виході елемента І сигналу одиничного рівня, ВУЛ формує сигнал нульового рівня, який запускає елемент відліку витримки часу. На період витримки часу імпульсні трансформатори обох комплектів знаходяться у відключеному стані, а формування імпульсів управління в СІФУ забороняється. Після закінчення витримки часу відбувається підключення імпульсних трансформаторів до заданого комплекту, і одночасно дозволяється формування імпульсів у СІФУ [5].
3.3. Двигуни постійного струму
Двигун постійного струму знайшов широке застосування в різних областях діяльності людини, починаючи від використання тягового приводу застосовуваного в трамваях і тролейбусах, закінчуючи приводом прокатних станів і підйомних механізмів, де потрібно підтримку швидкості обертання приводу з великою точністю, а також при регулюванні вгору від номінальної характеристики.
Основними позитивними особливостями, які відрізняють ДПТ від асинхронного двигуна:
- Гнучкі пускові та регулювальні характеристики
- Двозонное регулювання, яке дозволяє досягати швидкості обертання більш 3000 об/хв.
Негативні риси:
- Складність у виготовленні і висока вартість
- У процесі роботи необхідно постійне спостереження, тому що колектор і струмознімальні щітки мають свій ресурс роботи, що в подальшому призводить до постійного обслуговування цього типу двигунів.
Двигун постійного струму застосовують тільки в тих випадках, де застосування двигуна змінного струму неможливо або вкрай недоцільно.
Двигун постійного струму складається з індуктора (статора) і якоря (ротора), розділених між собою повітряним зазором, колектора та струмознімальних щіток, а також конструктивних елементів двигуна (рис. 9).
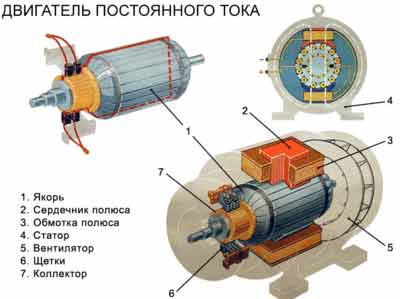
Рисунок 9 – Конструкція двигуна постійного струму
Індуктор являє собою станину, основні і додаткові полюси, які в сукупності створюють магнітне поле двигуна. Станина служить для того, щоб закріпити основні і додаткові полюси магнітної системи двигуна. На основних полюсах розташовуються обмотки збудження, а на додаткових – спеціальні обмотки, які служать для поліпшення комутації.
Якір складається з окремих листів робочої обмотки, покладених у пази, а також колектора який служить для підведення постійного струму до робочої обмотки.
Колектор має вигляд циліндра, який складається з пластин ізольованих один від одного, насаджений на вал двигуна. Щітки служать для знімання струму з колектора, які закріплені в щіткотримачах забезпечують правильне положення і натискання на поверхню колектора.
Двигуни постійного струму класифікують за магнітною системою статора:
- ДПТ з постійними магнітами;
- ДПТ з електромагнітами:
- ДПТ з незалежним збудженням
- ДПТ з послідовним збудженням
- ДПТ з паралельним збудженням
- ДПТ зі змішаним збудженням
Схеми підключення двигуна постійного струму представлені на малюнку 10.
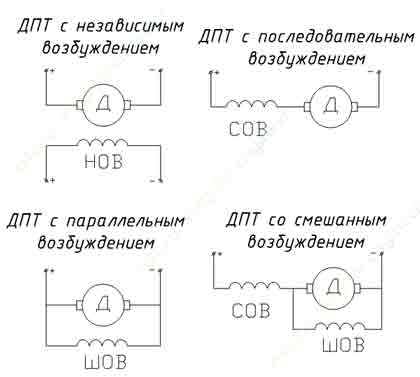
Рисунок 10 – Схеми підключення двигуна постійного струму
Різні схеми підключення обмоток статора суттєво впливають на електричні та тягові характеристики приводу [6].
У розробляємому стенді використовуються двигуни постійного струму незалежного збудження серії ПБСТ-32 потужністю 1,2 кВт, які призначені для роботи в широкорегулюємих електроприводах з діапазоном регулювання до 1:2000 (для верстатобудування). Двигуни ПБСТ – реверсивні і виконуються з вбудованим тахогенератором.
3.4. Керуюча частина
Основою цифрової системи управління стенду є високошвидкісна плата розширення АЦП/ЦАП 5710 Octagon systems (рис. 11).
5710 являє собою плату АЦП з високою роздільною здатністю, на якій також містяться пристрої введення/виводу дискретних сигналів.

Рисунок 11 – Плата 5710
Аналогова частина плати дозволяє проводити вимірювання з частотою 70 000 вимірювань в секунду. Ініціалізація перетворювача здійснюється або під управлінням плати обчислювача (процесорної плати) або за допомогою розташованого на платі 5710 лічильника/таймера. В останньому випадку вимірювання проводяться в фоновому режимі. Лічильник/таймер також може бути використаний для виконання тимчасових вимірювань загального призначення або для генерації ШІМ-сигналу.
До плати 5710 можуть бути підключені 16 уніполярних або 8 диференціальних аналогових сигналів. Роздільна здатність АЦП становить 12 розрядів про вхідному сигналі (-5...+5) В. Перемикання каналів здійснюється програмним способом. Допускається подавати на входи сигнали напругою до (-15...+15) В за відсутності на платі напруги живлення. Розташований на платі підсилювач дозволяє змінювати коефіцієнт посилення х1, х10, х100 шляхом установки перемичок. Вхідний сигнал при цьому буде становити (+-5) В, (+-500) мВ і (+-50) мВ відповідно.
Плата 5710 дозволяє виконувати до 33 000 вимірювань в секунду, а плата 5710-1 – 70000 вимірювань в секунду.
На платі також є 2 аналогових вихідних канала. Вихідний сигнал також задається перемичками і може бути (0...5) В, (+-10) В або (+-5) В.
Плата 5710 дозволяє працювати з 19 дискретними лініями введення/виводу. Лінії скомпоновані в 3 групи. Одна група з трьох ліній може працювати тільки на вихід, наступна група з 8 ліній може бути налаштована двома підгрупами по 4 лінії на вхід або на вихід, а третя група з 8 ліній також може бути налаштована на вхід або на вихід, але всією групою цілком [7].
У даній роботі задіюються 7 аналогових входів і 2 аналогових виходів плати 5710. Вхідними є сигнали, що надходять з датчиків швидкості, струму і напруги, вихідними – сигнали завдання для кожного двигуна.
Для ізоляції керуючої частини від силової в стенді передбачені гальванічні розв'язки напруг ADAM-3014, SCM5B41 і струмів SCM5B40. Вхід розв'язок напруг -10...+10 В, струмових розв'язок -100...+100 мВ , вихід -5...+5 В [8].
3.5. Програмна частина
Програмування системи управління складається з таких етапів:
- Робота в Windows :
- Обов'язкове видалення старих файлів моделі та візуалізації
- Створення моделі системи управління в пакеті Matlab/Simulink і її компіляція командою Tools > Real – Time Workshop > Build Model. У цей час створюються нові файли моделі та візуалізації в папці ...\matlab\work
- Робота в QNX
- Запуск QNX із завданням частоти дискретизації (у даній роботі використовується частота дискретизації рівна 0,5 мс)
- Запуск файлового менеджера командою #mqc і заміна старих файлів моделі та візуалізації на нові в папках 1/system/bin і 1/system/config відповідно
- Вихід з файлового менеджера і запуск графічного редактора Photon командою #ph
- Запуск моделі в QNX командою #system/bin/motor109
- Запуск програми візуалізації в QNX командою #system/bin/main
Результатом цих дій є можливість комп'ютерного керування електроприводом і відображення графіків зміни координат системи на екрані.
Перевагою такого способу управління є зручність у використанні, так як є можливість змінювати параметри моделі у реальному часу. Таким чином можна швидко робити настроювання регуляторів, змінювати плавність розгону і гальмування двигуна, величину сигналу завдання і контролювати всі необхідні координати (швидкість, струм, напруга) в реальному часі.
Недоліком такої системи, на мій погляд, є необхідність переходу з однієї операційної системи в іншу при редагуванні моделі.
На рисунку 12 показаний зовнішній вигляд моделі в пакеті Matlab/Simulink.
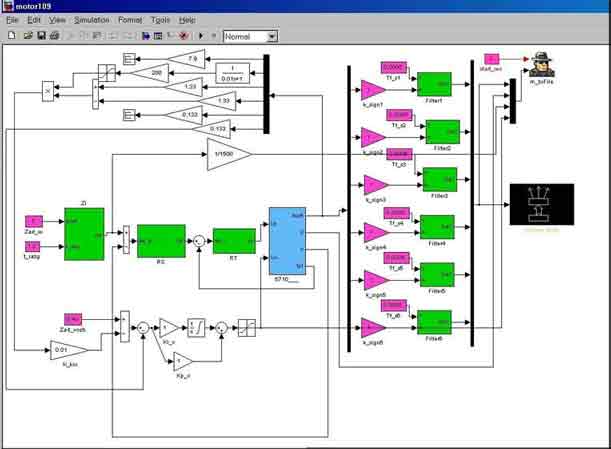
Рисунок 12 – Зовнішній вигляд моделі в Simulink
Модель можна розділити на такі частини:
- Система управління (замкнута зворотними зв'язками чи разімкнута, представлена тільки задатчиком інтенсивності). Ця частина моделі може редагуватися оператором. Важливим моментом є можливість зв'язування параметрів моделі з програмою візуалізації шляхом прописування потрібних значень у файлі main.cfg, що дозволяє потім змінювати їх в QNX. Це значно полегшує налаштування системи управління, оскільки дозволяє в режимі реального часу змінювати параметри регуляторів.
- Підсистема з моделлю плати 5710. В даному блоці вказуються необхідні параметри для зв'язку комп'ютера з апаратною частиною, зокрема в ньому можна вказувати кількість керуючих впливів, зворотних зв'язків і сигналів, що підлягають реєстрації в програмі візуалізації.
- В якості цифрової обробки сигналів в даній моделі передбачені цифрові фільтри першого порядку, за допомогою яких можна отримувати більш якісні незашумлені сигнали з датчиків, що дуже важливо при налаштуванні замкнутої системи управління. Постійні часу фільтрів також можна змінювати програмно в реальному часі.
- Виходами моделі є файл запису і візуалізації.
Зовнішній вигляд програми візуалізації в QNX показаний на рис. 13. У ній побудовані графіки швидкості, струму, сигналу завдання і напруги на якорі при плавному пуску й гальмуванні двигуна.
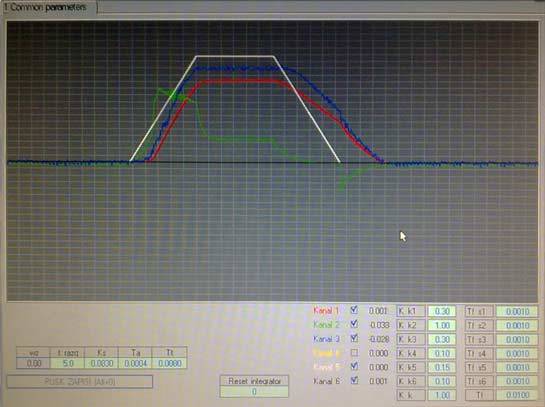
Рисунок 13 – Вікно програми візуалізації в QNX
3.6. Модель системи автоматичного управління ДПТ
В якості основної моделі виступає двоконтурна система підпорядкованого регулювання швидкості ДПТ, структурна схема якої наведена на рисунку 14.
Регулятор струму вибираємо ПІ-типу, а регулятор швидкості – П-типу. Передавальні функції регуляторів струму і швидкості згідно налаштування на модульний оптимум [9] мають вигляд:
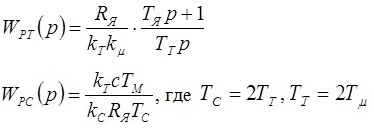
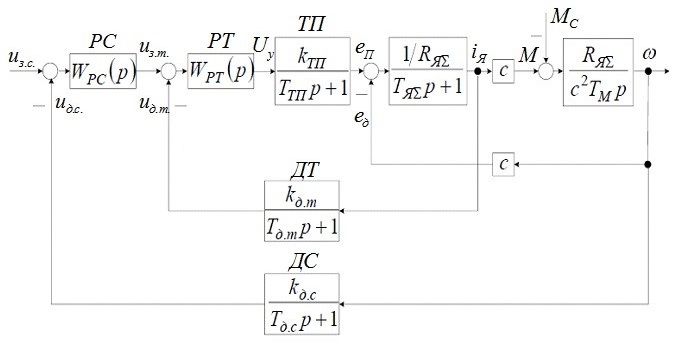
Рисунок 14 – Структурна схема двоконтурної системи підпорядкованого регулювання ДПТ
Висновки
Дана магістерська робота присвячена розробці і дослідженню засобів формування керучих впливів і обробки сигналів в електроприводі.
Перший етап роботи на момент написання реферату завершений. Його результатом є створення ефективного пристрою для реєстрації сигналів датчиків в діапазоні -10...+10 В на основі апаратної обчислювальної платформи Arduino. Отриманий пристрій можна використовувати в якості чотириканального цифрового осцилографа для дослідження низькочастотних сигналів в смузі пропускання 1 кГц.
Другий етап, що полягає в розробці експериментального стенду для дослідження цифрових систем керування електроприводом, на даний момент є не завершеним. Моя подальша робота буде полягати в експериментальному дослідженні та доопрацюванні наявних результатів.
При написанні цього реферату магістерська робота ще не закінчена. Ця частина реферату виключно оглядова. Подальша робота буде спрямована на эксперементальное дослідження і доопрацювання наявних результатів у сфері цифрових систем керування.
Список джерел
- Терехов В. М., Осипов О. И. Системы управления электроприводов. – М.: Академия, 2005. – 300 с.
- Официальный русскоязычный сайт платформы Arduino [електронний ресурс] – Режим доступу: http://arduino.ru/
- Официальный сайт среды разработки Arduino IDE [електронний ресурс] – Режим доступу: http://www.arduino.cc/
- Официальный сайт среды разработки Processing [електронний ресурс] – Режим доступу: http://www.processing.org/
- Привод БТУ 3601. Подробное описание принципов работы. – 111 с.
- Двигатель постоянного тока. Схемы соединения и характеристики ДПТ [електронний ресурс] – Режим доступу: http://h4e.ru/elektricheskie-mashini/133-dpt-shemi-harakteristiki
- Плата 5710 Octagon System. Руководство пользователя [електронний ресурс] – Режим доступу: http://www.octagonsystems.com/
- Оффициальный сайт компании Dataforth [електронний ресурс] – Режим доступу: http://www.prosoft.ru/products/brands/dataforth/
- Чекавский Г.С. Конспект лекций по СУЭП, ДонНТУ, каф. ЭАПУ, 2012 г.
- Официальный русскоязычный сайт платформы Arduino [електронний ресурс] – Режим доступу: http://arduino.ru/