
Реферат за темою магістерської роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, а також наукова новизна
- 3. Огляд досліджень та розробок
- 3.1 Огляд міжнародних джерел
- 3.2 Огляд національних джерел
- 3.3 Огляд локальних джерел
- 4. Розробка математичної моделі вбудованої системи подачі з ЕГК
- Висновки
- Перелік посилань
Вступ
Сучасний очисний комбайн – це високомеханізований та автоматизований механізм, який служить для видобутку корисних копалин, зокрема вугілля. Використання очисних комбайнів – найбільш ефективний і швидкий спосіб видобутку вугілля, але також найбільш складно здійсненний. Комбайни є механізмами, автоматизація яких повинна бути максимально глибокою з метою підвищення безпеки при витяганні вугілля та мінімізації витрат на ремонт обладнання.
Одним з основних механізмів комбайна є механізм подачі. Відомі кілька способів реалізації системи подачі комбайна:
— за кількістю механізмів подачі: один, два;
— по розташуванню системи подачі: вбудована, винесена;
— за типом системи подачі: ланцюгова, безланцюгової (рейкова);
На даний момент для виїмки тонких пластів застосовуються різні типи очисних комбайнів (наприклад УКД 200–250, УКД 300, 1К101У, К103М, КД85, К600 та ін.), на основі електромагнітної муфти ковзання (ЕМК). Починаючи з 2008 р., до складу системи переміщення УКД 200–250 входять автоматизованні електроприводи на основі електромагнітних гальм ковзання (ЕГК) [6]. Такі приводи мають декілька переваг (підвищення тягового зусилля, можливість реалізації водяного охолодження та ін.), однак зі створенням нових конструктивних рішень цих приводів вимагає зміни їх система управління.
1. Актуальність теми
На сьогоднішній день в Донбасі виймання тонких пластів в основному здійснюється очисними комбайнами з ланцюговою винесеною системою подачі (ВСП),
яка має ряд недоліків, таких як:
— нерівномірна подача комбайна;
— створення небезпечної ситуації для робітників;
— обслуговування довгого тягового ланцюгового органу;
Також система автоматичного управління (САУ) системою подачі з ВСП не враховує статистичних та динамічних характеристик нових приводів з ЕГК, характеру його навантаженості, а також підвищення вимог до тягового зусилля приводу подачі. Тому найбільш сучасні конструкторські рішення спрямовані на створення вбудованої системи подачі, в якій варіатором швидкості є ЕГК [4]. Однак принциповою відмінністю даної системи є наявність системи стабілізації швидкості. САУ швидкості подачі повинна враховувати статичні та динамічні характеристики новостворюваних приводів з ЕГК. Нові приводи крім збільшення потужності дозволили отримати ряд переваг, що поліпшують охолодження, параметри надійності та зменшення габаритів приводу. З точки зору управління приводом, істотно збільшилася його електромагнітна та механічна інерційність. З іншого боку, істотно зменшилася залежність індуктивності обмотки збудження ЕГК від струму управління через зменшення ступеня насичення магнітопровода в робочому діапазоні струмів.
Існуючий САУ управління швидкістю подачі не враховують можливості двухпріводной системи подачі при роботі комбайна на пластах з великими кутами падіння (до 35o). Іншою істотною проблемою приводів з ЕГК є наявність кидка обертального моменту при включенні електродвигуна приводу подачі. Обʼєднання приводів в одну систему подачі дозволить вирішити обидві названі проблеми.
2. Мета і задачі дослідження, а також наукова новизна
Метою роботи є дослідження та розробка САУ двухпріводной вбудованої системи подачі з ЕГК очисних комбайнів, що забезпечує інваріантність системи по відношенню до впливу кута падіння комбайна та усунення високодинамічних режимів пуску при включенні електродвигунів подачі.
Основні задачі дослідження:
- Провести огляд і проаналізувати проведені дослідження, існуючі технічні рішення та розробки в галузі автоматизації двухпріводной вбудованої системи подачі з ЕГК очисних комбайнів;
- Розробити математичну модель двухпріводной вбудованої системи подачі з урахуванням факторів, які впливають на навантаженість елементів двухпріводной вбудованої системи подачі очисного комбайна;
- Реалізувати розроблену математичну модель засобами обчислювальної техніки;
- Провести дослідження та проаналізувати отримані результати;
- Розробити алгоритм управління, структурну і принципову електричну схеми регулятора навантаження і швидкості;
Об'єкт дослідження: Автоматизована двухпріводная вбудована система подачі з ЕГК очисних комбайнів.
Предмет дослідження: Статичні та динамічні електромеханічні процеси, що протікають в двухпріводной вбудованій системі подачі.
Наукова новизна: Математична модель САУ двухпріводной вбудованої системи подачі, що враховує реальні статичні та динамічні характеристики сучасних приводів подачі з ЕГК.
Досягнення поставленої мети виконується шляхом включення двох приводів, що працюють на загальний вал, в протилежному напрямку та створення САУ такої системи подачі. Така система дозволить усунути кидки обертального моменту при включенні електродвигунів подачі та забезпечить повну керованість системи в умовах пластів з кутами падіння до 35o.
3. Огляд досліджень та розробок
3.1 Огляд міжнародних джерел
У світі значного поширення набув видобуток вугілля лавовим способом. Основна роль у видобутку вугілля відведена узкозахватним комбайнам з вбудованою системою подачі на основі частотно–керованого привода. На прикладі однієї з провідних німецьких фірм Eickhoff Bergbautechnik [9] можна позначити тенденцію розвитку комбайнів для видобутку вугілля. Спочатку винесена система подачі в їх очисних комбайнах була реалізована із застосуванням лебідки, коли комбайн переміщався за допомогою прикріпленого до корпусу тягового каната. З часом Eickhoff Bergbautechnik почали переходити до виробництва винесеної системи подачі очисних комбайнів з частотно–керованими електроприводами, а незабаром і зовсім перейшли до вбудованої системи подачі. Після цього всі розробки в області автоматизації систем переміщення ведуться в напрямку удосконалення даного приводу. Однак такі дослідження проводяться закордоном, з виділенням солідних грошових коштів.
У нашій країні та країнах ближнього зарубіжжя, на даний момент, для розвитку вугільної промисловості таких коштів не виділяється. Тому, враховуючи дорожнечу очисних комбайнів з частотно-керованим приводом, знайшли широке застосування очисні комбайни з ВСП на основі електромагнітної муфти ковзання.
3.2 Огляд національних джерел
Розглянемо застосування винесеної системи подачі (рис. 3.1) на прикладі очисного комбайна УКД-250. Приводні двигуни відповідно винесені на штрек (змонтовані на кінцевих ділянках конвеєра). У якості приводних елементів рушіїв застосовані зірочки. Загальний ланцюговий тяговий орган закріплений за допомогою вертлюгів до корпуса машини й охоплює обидві зірочки на кінцях конвеєра. При роботі передня по ходу руху очисного комбайна підсистема переміщає робочу вітку ланцюга, а задня – підтягує холосту вітку тягового органа.
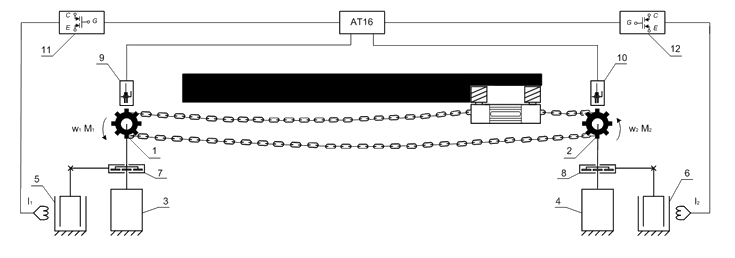
Рисунок 3.1 – Функціональна схема заміщення ВСП очисного комбайна
На схемі позначено: 1, 2 – приводна зірочка відповідно тягнучого й підтягуючого приводів подачі; 3, 4 – приводні двигуни; 5, 6 – електромагнітні гальма ковзання; 7, 8 – диференціальні редуктори; 9, 10 – індуктивні датчики наближення (датчики швидкості); 11, 12 – підсилювачі на IGBT-транзисторах; АТ16 – мікроконтролер типу ATmelMega 16.
Існує дві групи механізмів подачі – вбудовані та винесені.
Винесені механізми подачі мають ряд недоліків. Головним недоліком таких механізмів є дві рухомі гілки тягового ланцюга, що значно ускладнює пересування забійного конвеєра, зведення кріплення (особливо при викривленнях лави) та знижує безпеку робіт. Конструкція даного механізму має декілька складнощів:
- Для того щоб не мати натягнутих гілок на всій лаві необхідно використовувати два механізми, розташовані з обох її кінців;
- Такими механізмами значно важче керувати, тому що необхідно погоджувати дії двох механізмів, а для дистанційного керування потрібні спеціальний кабель і апаратура;
- Для забезпечення більш зручного підведення енергії (гідравлічної) та більш рівномірного розподілу її поміж механізмами бажано мати дві насосні станції, одна з яких розташовується на вихідному струмені потоку повітря в лаві.
Тягові зусилля у винесених механізмах вище, ніж у вбудованих, тому що по всій лаві доводиться простягати дві гілки ланцюга, які зустрічають значні опори при своєму русі по грунті. Також, рухомі гілки тягового ланцюга і її збільшена довжина погіршують динаміку подачі комбайна за рахунок значної потенційної енергії тягового органу, власних коливань зусиль у ланцюзі та впливу її другої гілки. Це збільшує нерівномірність руху комбайна, підвищує динамічні навантаження на привід його виконавчого органу та, частково, знижує продуктивність. До недоліків слід віднести і часто знижену силу ваги власне комбайна, яка є основним фактором його стійкості під час роботи.
Вбудовані механізми подачі мають декілька переваг. Основною з них є нерухомість тягового органу, що забезпечує більш зручне й безпечне його розташування на комбайні і в лаві. Нерухомий тяговий орган також дозволяє в значній мірі знизити натяг холостий гілки тягового ланцюга. За рахунок цього можна розташувати холосту гілка таким чином, щоб не перешкоджати поперечному переміщенню забійного конвеєра та зведенню кріплення за комбайном (при викривленнях лави). Управління вбудованим механізмом подачі спрощується, оскільки він розташований безпосередньо на комбайні. Тягові зусилля в ланцюзі такого механізму нижче і його к. п. д вище, ніж к. п. д винесеного механізму. Конструкція вбудованого механізму часто простіше через те, що він зазвичай наводиться від загального двигуна. При цьому останнє варто віднести і до недоліків вбудованого механізму.
3.3 Огляд локальних джерел
Наукові дослідження в галузі автоматизації винесеної системи подачі проводилися такими вченими як: Поцепаєв В. В. (проводив дослідження динаміки і вибір раціональних параметрів винесеного приводу подачі очисних комбайнів)[1][2], Дубінін С. В. (проводив дослідження ВСП на основі електромагнітної муфти ковзання)[5], Бойко Н. Г. (займався питанням нерівномірності переміщення комбайна з гнучким тяговим органам)[8].
У 2007 р. магістр ДонНТУ Санченко А. П. провів дослідження з удосконалення існуючої системи управління ВСП, реалізуючи автоматичне керування обома приводами подачі, що дозволило знизити навантаженість на приводи. Також у роботі обгрунтована необхідність застосування в якості датчиків швидкості більш досконалих – датчиків наближення. Але при складанні моделі ВСП у якості варіатора швидкості була прийнята електромагнітна муфта ковзання. Крім того, розроблений пристрій не забезпечував розподілу навантажень між приводами.
У 2010 р. магістр ДонНТУ Гуцалюк С. В. вже займався підвищенням експлуатаційної ефективності винесеної системи подачі комбайна УКД–250 на основі обгрунтування раціональних параметрів тянучого та підтягуючого автоматизованих електроприводів подачі. Однак тут також фігурує винесена система подачі, яка має ряд недоліків, зазначених вище.
4. Розробка математичної моделі вбудованої системи подачі з ЕГК
На підставі моделі приводу подачі, де в якості варіатора швидкості використовується ЕГК, представленої в роботі [3], була отримана модель двухпріводної вбудованої системи подачі з ЕГК. Для автоматичного керування швидкістю та навантаженням очисного комбайна кожен привід подачі оснащений своїм ЕГК. Швидкість подачі і тягове зусилля змінюються за допомогою автоматичного регулювання струму збудження ЕГК. У моделі враховані реальні статичні та динамічні характеристики приводу. На рис. 4.1 предсталена математична модель власне приводу подачі з ЕГК:
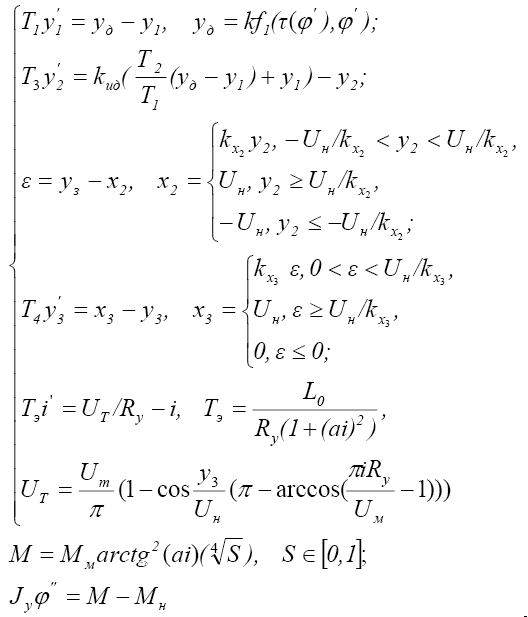
Рисунок 4.1 – Cистема диференціальних рівнянь (1)
де T1–T4 – постійні часу відповідних динамічних ланок; Tэ – часова характеристика обмотки управління ЕГК; yд – вихідний сигнал дискретного датчика швидкості з коефіцієнтом перетворення k та часом запізнювання тау; фи – кут повороту приводной зірки; kид – коефіцієнт посилення інтегро-диференціюючої ланки; E – сигнал неузгодженості; kx2, kx3, x2, x3 – коефіцієнти підсилення та вихідні сигнали відповідних нелінійних ланок; Uн – напруга обмеження вихідного сигналу нелінійних ланок; Uт – вихідна напруга тиристорного перетворювача; Ry – активний опір обмотки управління ЕГК; i – струм управління ЕГК; Um – амплітуда синусоїдальної напруги живлення тиристорного перетворювача; M – електромагнітний момент ЕГК; Mk – критичний момент ЕГК; a – емпіричний коефіцієнт, що враховує ступінь насичення магнітопровода ЕГК; Jy – момент інерції обертових елементів приводу, приведений до приводної зірки; S – ковзання ЕГК; Mн – момент навантаження, прикладений до зірки приводу.
У доповненні до математичної моделі приводу подачі було складено диференційне рівняння, яке описує рух комбайна з масою [7]. Структурна схема двухпріводной вбудованої системи подачі з ЕГК представлена на рис. 4.2. Модель реалізована та досліджена в середовищі SIMULINK.
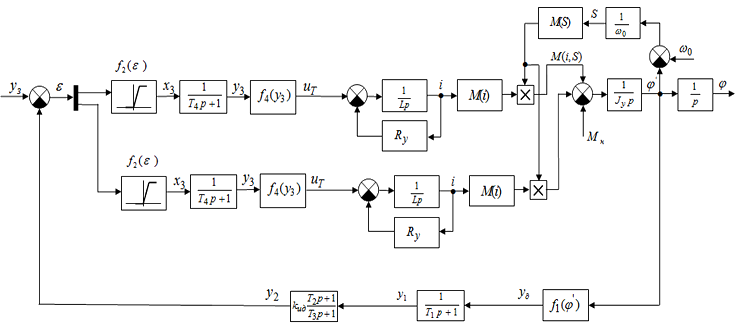
Рисунок 4.2 – Структурна схема двухпріводной вбудованої системи подачі з ЕГК
f2(E) – коефіцієнт посилення прямого контуру (K = 12). Обмеження ланки визначається верхнім рівнем 10 В діапазону керуючого сигналу фазосдвигаючого пристрою керованого випрямляча (тиристорного моста або моста на силових польових транзисторах). Апериодична ланка 1/T4P + 1 та нелінійність Uт = f4(y3) моделює керований випрямляч. Постійна часу T4 дорівнює тривалості напівперіоду мережевої напруги.
У моделі обмотки управління ЕГК L(i) – індуктивність обмотки управління, яка внаслідок насичення магнітопровода є функцією струму. Ця функціональна залежність добре апроксимується функцією: L(i) = L0/1 + ai2, де L0 – індуктивність при насиченому магнітопроводі.
Нелінійна ланка M(i) відтворює залежність обертаючого моменту приводу оcі струму управління M(i) = Ммarctg2(ai), де Мм – максимальний момент, який визначається конструктивними параметрами ЕГК (форма та кількість зубців-полюсів індуктора, марка сталі, зазор між якорем і індуктором та ін.).
M(s) – залежність обертаючого моменту приводу від ковзання. Для заданої конструкції ЕГК ця залежність апроксимується
M(s) = ![]() . Добуток M(i) на M(s)
визначає статичні характеристики ЕГК: M(i,s) = Mмarctg2(ai)*
. Добуток M(i) на M(s)
визначає статичні характеристики ЕГК: M(i,s) = Mмarctg2(ai)*![]() .
Mн – момент навантаження, прикладений до зірки приводу. Асинхронний електродвигун моделюється з постійною
швидкістю обертання W0, що цілком відповідає поставленій задачі.
.
Mн – момент навантаження, прикладений до зірки приводу. Асинхронний електродвигун моделюється з постійною
швидкістю обертання W0, що цілком відповідає поставленій задачі.
Інтегратор з постійною часу 1/Jy відтворює швидкості обертових мас приводу. Jy – приведений момент всіх обертових мас приводу індуктора, колісних пар та валопроводу планетарного редуктора, проміжного редуктора і маси комбайна. При передавальному відношенні 192 та сумарному моменті інерції на вході трансмісії 0,15 кг*м2 наведений до приводного колесу момент інерції: Jy = 5530 кг*м2.
Ланка y1 є першою ланкою фільтра другого порядку, призначеного для фільтрації наведень від напруженості живильної мережі (T1 = 0,003 сек). Ланка y2 – це сума реальной діференціюючої ланки T2P + 1/T3P + 1 та апериодичної ланки першого порядку 1/T3P + 1. Реальна діференціююча ланка забезпечує позитивний фазовий зсув сигналу зворотного звʼязку. Ланка 1/T3P + 1 та знаменник реальной діференціюючої ланки є другими ланками зазначеного фільтра другого порядку. Коефіцієнт kид встановлює масштаб вимірювання сигналу зворотного зв'язку по кутовій швидкості.
Промоделюємо рух комбайна на холостому ходу з різними кутами падіння (рис.4.3):
Рисунок 4.3 – Залежність швидкості подачі очисного комбайна від струму при різних кутах падіння
(анімація: объём – 67 КБ; розмір – 650х300; кількість кадрів – 5; затримка між кадрами – 1500 мc; кількість циклів повторення – 5)
На графіках видно як змінюється швидкість руху комбайна та значення струму на обох приводах залежно від кута падіння (0o, 5o, 15o, 25o та 35o). Коли кут падіння дорівнює 35o, швидкість руху комбайна становить 0,25 рад/с, при цьому струм першого (провідного) приводу практично дорівнює 0 А, а струм другого приводу дорівнює 8 А. Це говорить про те, що все навантаження припадає на гальмуючий привід. При русі комбайна по рівній поверхні відбувається зворотне – струм гальмуючого приводу дорівнює 0 А, тобто все навантаження лягає на провідний привід. Це говорить про те, що при належному розподілі навантаження між приводами система буде повністю керована.
Висновки
Розроблено структуру та досліджена САУ двухпріводной вбудованої системи подачі з ЕГК очисних комбайнів.
Запропоновано схему зустрічного включення приводів подачі, що працюють на один вал, з метою підвищення керованості очисного комабайнах на пластах з великими кутами падіння та усунення кидків обертального моменту при включенні електроприводу подачі.
Надалі в магістерській роботі буде проведено більш детальне моделювання двухпріводной вбудованої системи подачі з ЕГК, розробка алгоритму управління, структурної та принципової електричної схеми системи управління швидкістю подачі.
Перелік посилань
- Поцепаев В. В. Исследование динамики и выбор рациональных параметров вынесенного привода подачи очистных комбайнов: автореф. дисс. на соиск. уч. степ. канд. техн. наук. / Поцепаев В. В. — М.: ИГД им. А. А. Скочинского, 1986. — 14 с.
- Поцепаев В. В. Математическая модель вынесенного привода подачи комбайнов для тонких пластов //Научн.тр.ИГД им. А. А. Скочинского. - 1983. - Вып.218. - С.56-62.
- Дубинин С. В., Поцепаев В. В. Система автоматической стабилизации скорости вынесенного привода подачи с электромагнитным тормозом скольжения для горных машин. // Наукові праці Донецького національного технічного університету. Серія: Обчислювальна техніка та автоматизація. - Вип. 22 (200). – с.6 – 10.
- Дубинин С. В., Сидоренко И. Т. Применение электромагнитных муфт скольжения в приводах горных машин// Горн.электромеханика и автоматика: Респ.межвед. науч.-техн. сб.- Киев: Техника.1988г., Вып. 52- С.62-65.
- Дубинин С. В. Снижение динамических нагрузок и повышение эффективности вынесенной системы подачи очистного комбайна: Автореф. дисс.. на соиск. уч. степ. канд. техн. наук. / Дубинин С. В. — Донецк, 1991 г. — 209 с.
- Щетинин Т. А. Электропривод с индукционными муфты и тормозами. /Щетинин Т. А. — М.: Машиностроение, 1970. — 146-150 c.
- Горбовский И. В. Исследование САУ встроенной системой подачи с электромагнитными тормозомами скольжения очистных комбайнов / Гос ВУЗ «Донецкий национальный технический университет» / Матерiали: ХIV Міжнародна науково-технічна конференція аспірантів і студентів — Донецьк, ДонНТУ — 2014, Том 2, с. 121-123.
- Бойко Н. Г. Динамика очистных комбайнов. - Донецк: РВА ДонНТУ, 2004. - 206 с.
- CAN. CAN in Automation (CIA): Shearer loader mining vehicle [Электронный ресурс] / CAN. — Режим доступа к статье: http://www.can-cia.org/index.php?id=246&L=2