
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання дослідження, плановані результати
- 3. Огляд міжнародних джерел
- 4. Кінематика і динаміка робота
- 4.1 Кінематика маніпулятора
- 4.2 Динаміка маніпулятора
- 5. Моделювання
- Висновки
- Перелік посилань
Вступ
Найважливішим функціональним елементом, що забезпечує стабільність процесів руху металу в кристалізаторі МБЛЗ, є занурювальна склянка. Здійснюючи технологічний перелив рідкого металу на ділянці проміжний ківш-кристалізатор
, він виконує функції захисту металу від вторинного окислення, підведення розплаву під рівень в кристалізатор, сприяючи раціональної організації руху конвективних потоків в рідкій ванні, а також запобігання забрудненню сталі включеннями шлакоутворюючої суміші розташованої на меніску.
1. Актуальність теми
У сучасній практиці безперервного розливання слябовой заготовки все більшого поширення набуває техніка швидкої заміни погружної склянки. Доцільність такої заміни обумовлюється можливістю виключення відходів металу зі шлаковими поясами, які утворюються при експлуатації звичайних виробів. Така заміна досягається за допомогою спеціального прилада, що встановлюється під днищем промковша і забезпечує швидке переміщення заглибних склянок (нового і старого) уздовж площини ковзання. Заміна погружної склянки здійснюється протягом однієї-двох секунд, що не порушує нормального перебігу процесу розливання (не змінюється положення головки стопора, не припиняється робота системи автоматичного контролю рівня металу в кристалізаторі і т. п.).
2. Мета і завдання дослідження, плановані результати
В даному процесі основну увагу приділено механізму повороту і подачі склянки маніпулятором. Для початку передбачається виконати аналіз режимів роботи пристрою, вибрати приводний двигун і систему електроприводу. Розробити математичну модель в середовищі Matlab/Simulink. Далі передбачається провести експериментальні дослідження і виявити основні переваги і недоліки використовуваного приводу. На даний момент розглядаються питання поведінки електромеханічної системи на базі її моделі з урахуванням пружних властивостей маніпулятора в режимі установки проміжної склянки, показана послідовність вибору ланок маніпулятора і визначення її пружних характеристик. Передбачається ідеалізована двомасова система, в якій демпфіруючі властивості враховуються на базі в’язкого тертя.
3. Огляд міжнародних джерел
Перші промислові роботи з’явилися в США в 1959 році, коли були створені роботи з програмним управлінням. У 1962 знайшли своє застосування роботи Юнімейт
, Версатран
для обслуговування процесів лиття, кування, механічної обробки, точкової зварювання, фарбування. Вартість перших роботів становила 25–30 тисяч доларів за одиницю. В автомобільній і металургійній промисловості терміни окупності складали 1,5–2,5 року, що було досить високим показником для того часу [1].
Цікаво зауважити, що в журналі МешінеріМегезін
була опублікована стаття про появу нового типу робітника, який не п’є кави, не курить, працює 24 години на добу і не є членом профспілки [4].
Слово robota
(панщина, підневільна праця) було використано чеським письменником К. Чапека в п’єсі RUR (Россумскіе універсальні роботи, січень 1921 р).
Воно швидко перекочувало в техніку і стало застосовуватися в якості номінального для тих механізмів, які виконують важку, одноманітну роботу. Цей клас механізмів так і отримав назву роботи
.
Передові країни світу починають активний випуск ПР в боротьбі за ринок сбита. На перше місце з проектування, виробництва та впровадження виходить Японія. Динаміку зростання випуску ПР можна простежити по наступних цифр: в 1978 р в світі було 16000 ПР, у 1980 році 25000, у 1983 р в капіталістичних країнах 31000 штук. За таким показником як число роботів на 10000 робочих на першому місці в світі є Швеція 40, в Японії 13, у США і ФРН 3 – 4 шт. За орієнтовними даними в СРСР в 1983 р діяло близько 7000 ПР і до 1990 р планувалося число ПР довести до 375 тис. штук. Японія продовжує утримувати першість з проектування нових типів роботів. Велика увага приділяється створенню так званих гуманоїдних роботів, які повторюють рухи людини, розробляються і випускаються спеціалізовані роботи для допомоги людям з дефектами зору, слуху, опорно-рухового апарату [1, 2].
4. Кінематика і динаміка робота
Дослідження кінематики та динаміки є важливим етапом проектування маніпуляторів. На цьому етапі проводиться стиковка геометричних характеристик проектованих модулів ступенів рухливості і маніпулятора в цілому з робочим простором і робочою зоною робота; визначаються можливості маніпулятора з точки зору кінематики та динаміки при виконанні тих чи інших технологічних операцій; враховуються різні несприятливі чинники, наприклад пружна податливість елементів. Результати таких досліджень зазвичай використовують для коригування конструкторських рішень, прийнятих на попередніх етапах проектування. Крім того, вони необхідні в подальшому при проектуванні системи управління робота, тому що на їх основі будується модель робота як об’єкта управління [3].
4.1 Кінематика маніпулятора
Для постановки і рішення задач кінематики зазвичай складають розрахункову кінематичну модель маніпулятора, в основу якої мають бути покладені передбачувані або наявні геометричні розміри ланок, а також типи, кількість і розподіл кінематичних пар. Маніпулятор зазвичай являє собою відкритий кінематичний ланцюг, елементи якого з’єднані один з одним за допомогою кінематичних пар. Як правило, це одноподвіжні кінематичні пари п’ятого класу - обертальні або поступальні. Якщо кінематичний ланцюг не містить внутрішніх замкнутих контурів, то число кінематичних пар визначає число ступенів рухливості маніпулятора. Найпростіші маніпулятори мають дві-три ступені рухливості. Універсальні, а також деякі спеціальні маніпулятори можуть мати шість-вісімь ступенів рухливості. Ланки кінематичного ланцюга з’єднані кінематичними парами так, що одне з них кріпиться до основи (рухомої або нерухомої), а ще одне несе на собі робочий орган - схват або інструмент.
Положення кінематичного ланцюга в просторі будемо визначати за допомогою узагальнених координат qi(i=1,2,...n), що характеризують відносні переміщення в кінематичних парах. Для визначення положення робочого органу в просторі введемо координати rj(j=1,2,...m), де m≤6. У загальному випадку m=6, тобто необхідно ввести шість скалярних величин, наприклад три координати деякої точки схоплення, прийнятої за полюс, і три кути, що характеризують орієнтацію системи координат, жорстко пов’язаної з схопом, щодо опорної системи координат, пов’язаної з підставою. Розглянемо деякі найбільш характерні завдання кінематики маніпуляторів. Пряма задача про становище маніпуляторів.
При вирішенні цього завдання розраховують положення робочого органу, а також ланок маніпулятора по заданому відносному переміщенню qi(i=1,2,...n) в кінематичних парах. Можливі три варіанти постановки прямої задачі. Координати qi(i=1,2,...n) можуть бути задані:
- у вигляді набору n скалярних величин, що визначають деяку фіксовану конфігурацію маніпулятора;
- у вигляді кінцевого числа наборів, що відповідають кільком конфігураціям;
- у вигляді набору і безперервних функцій часу qi=qi(t)(i=1,2,...n);
Якщо розраховують положення робочого органу, наприклад схвата, то визначають відповідно або координати схвата rj(j=1,2,...,m), або кінцеве число наборів координат схвата, або закони зміни координат схвата в часі rj=rj(t)(i=1,2,...m). У загальному випадку при m=6 в результаті розрахунку координат схвата (j = 1, 2, ...m) як функцій часу rj=rj(t) можна визначити рівняння траєкторії полюса схвата в параметричной (в залежності від часу) або явній формі і орієнтацію схвата уздовж всієї траєкторії.
За допомогою прямої задачі можна визначити:
- геометричні характеристики робочого простору і робочої зони маніпуляторів зі складною кінематичною схемою при конструктивних обмеженнях на узагальнені координати типу qi min≤qi≤qi max(i = 1, 2,... n);
- точності характеристики, наприклад похибки Δrj(j=1,2,...,m) визначення координат схвата rj(j=1,2,...,m), обумовлені неточним виготовленням елементів маніпулятора, або похибками Δqi(i=1,2,...,n);
- відпрацювання відносних переміщень qi(i=1,2,...,n) в кінематичних парах;
- сервісні характеристики.
Пряму задачу про становище використовують при дослідженні кінематики і динаміки маніпуляторів.
Зворотнє завдання про становище маніпулятора. За допомогою цього завдання визначають узагальнені координати qi(i=1,2,...,n) маніпулятора по заданому в опорній системі координат положення робочого органу або деякої ланки маніпулятора. Зокрема, якщо за заданими координатами схватa rj(j=1,2,...m) вдається визначити узагальнені координати маніпулятора qi(i=1,2,...,n), то координати інших ланок маніпулятора знаходяться на наступному етапі шляхом розв’язання прямої задачі.
Умова n=m є необхідною для того, щоб зворотна задача в загальному випадку мала рішення, тобто щоб можна було скласти n незалежних рівнянь з n невідомими. У деяких випадках при n=m рішень може бути кілька. Як приклад на рисунку 1 зображений плоский шарнірний трехзвеннік з трьома ступенями рухливості (n=3). Положення схвата як твердого тіла в площині визначається трьома координатами: координатами xp и yp полюса схвата Р і кутом α між координатними системами жорстко пов’язаної зі схватом Рx’у’ і опорної Оху (m=3). Якщо на узагальнені координати q1, q2 и q3не накласти обмежень, то завжди є дві конфігурації, що забезпечують задане положення схвата. У цьому випадку говорять, що маніпулятор має одну ступінь маневреності. Яке з рішень має бути вибрано, залежить від додаткових умов, наприклад перешкод в робочому просторі маніпулятора або конструктивних обмежень на узагальнені координати, які для реальних маніпуляторів завжди мають місце.
Умова n=m не є достатньою, тому можливі варіанти, коли рішення обратної задачі відсутнє (це залежить від типу і розподілу кінематичних пар). В цьому випадку необхідно зменшити число n довільно заданих координат схвата. Можуть існувати особливі рішення, коли деякі з узагальнених координат qi допускають будь-які значення.
При n<m рішення обратної задачі в загальному випадку відсутнє. Його можна отримати, якщо довільно задати лише n координат схвата.
При n>m зворотна задача вирішується неоднозначно. Якщо, наприклад, задані n координат схвата rj(j=1,2,...,m), то в загальному випадку можна ще довільно задати n-m узагальнених координат qi. Решта m узагальнених координат qi, при n> m кажуть, що маніпулятор має надлишкові ступені рухливості. Їх використання дозволяє забезпечити маніпулятору можливість роботи в середовищі з перешкодами, а також врахувати додаткові обмеження на узагальнені координати qi(i=1,2,...,n) або умови на конфігурацію маніпулятора.
Як і в прямій задачі про становище маніпулятора, в зворотній задачі можливі три варіанти постановки:
- задається одне положення схвата, тобто один набір скалярних величин rj(j=1,2,...,m) і відповідно знаходиться одна конфігурація маніпулятора (або кілька конфігурацій, якщо рішень кілька);
- задається кінцеве число положень схвата і знаходяться відповідні конфігурації маніпулятора (для деяких положень схвата може бути знайдено кілька конфігурацій);
- задається закон руху схвата в часі rj=rj(t)(j = 1, 2, ...m) і знаходяться закони зміни узагальнених координат qi=qi(t)(i = 1, 2,.. n).
Зворотнє завдання про становище маніпулятора більш складнє, ніж прямє. У багатьох випадках його ефективність можна вирішити тільки чисельно.
Завдання розрахунку лінійних швидкостей і прискорень деяких точок маніпулятора, а також кутових швидкостей і прискорень його ланок. Це завдання тісно пов’язанє з прямим і зворотнім завданням про становище маніпулятора і теж може мати пряму і зворотню постановку [3].
Рисунок 1 – Плоський шарнірний трьохзвеннік з трьома ступенями рухливості (анімація: 4 кадри, 7 циклів повторення, затримка: 2000 мс, 69 кілобайт)
4.2 Динаміка маніпулятора
При дослідженні динаміки маніпуляторів складають розрахункову динамічну модель, враховуя не тільки геометричні розміри ланок і розподіл кінематичних пар, як при складанні кінематичної моделі, а й розподіл мас ланок і інших елементів маніпулятора, що беруть участь в русі. Можуть бути враховані і інші властивості маніпулятора, наприклад пружні властивості його елементів. У цьому випадку число ступенів свободи системи стає більше числа ступенів рухливості маніпулятора, яке визначають як число незалежних керованих рухів маніпулятора (для маніпуляторів з розімкненим кінематичним ланцюгом воно дорівнює числу приводів).
В аналітичній механіці є різні принципи і методи для складання диференціальних рівнянь руху механічних систем будь-якої складності. Далі будемо використовувати рівняння Лагранжа другого роду

де Ек и Еп – кінетична і потенційна енергія системи; qi – узагальнені координати (в загальному випадку їх число може перевищувати число ступенів рухливості робота); Qi – узагальнені сили (сили або моменти, що розвиваються приводами, а також зовнішні сили або моменти, наприклад виникають при взаємодії інструменту і оброблюваної поверхні).
Для спрощеної схеми передачі руху від двигуна до ланок (рис. 2) можна записати результуюче рівняння руху, до якого увійдуть навантаження від першого і другого ланок – Mc1 и Mc2.
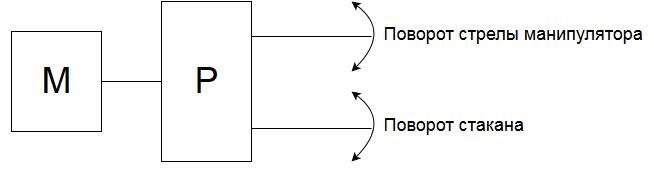
Рисунок 2 – Спрощена схема передачі руху від двигуна до ланок

Рішення цього рівняння при спрощеному завданні моментів опору може бути виконано графоаналітичним способом. Попередньо задаємося масштабами по моменту часу і частоті обертання. Далі з рівняння руху, представленого у вигляді:

знаходимо масштаб по моменту інерції:

5. Моделювання
Розглянутий маніпулятор може бути представлений розрахункової електромеханічної системою, яка складається з двох принципових мас. Перша розрахункова маса включає в себе елементи двигуна і механічного перетворювача. Друга маса – це захватний пристрій з проміжною склянкою. Між цими ланками знаходиться рука, жорсткість якої буде врахована. Тобто реальна розрахункова схема може бути зведена до вигляду (рис. 3).
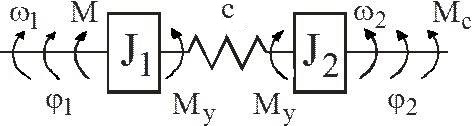
Рисунок 3 – Розрахункова схема двомасової системи
Живлення приводного двигуна в загальному випадку здійснюється від керованого перетворювача (як на постійному, так і, можливо, на змінному струмі). Вид механічних характеристик і бажаний характер динамічного моменту можуть бути реалізовані для будь-якої з названих систем. Тобто дослідження поведінки системи може бути виконане в першому наближенні на підставі характеру зміни динамічного моменту впливаючого на першу масу розрахункової системи.
Облік пружних властивостей системи виконаний при моделюванні останньої. Система рівнянь, що описує її поведінку, наведена нижче [5-7].

Математична модель для наведеної системи рівнянь представлена на рис. 4.
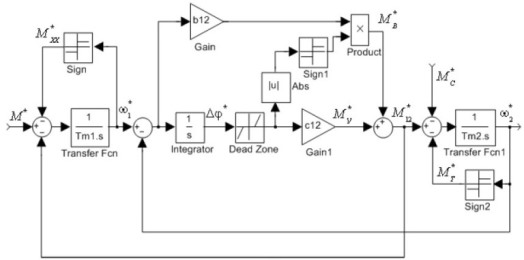
Рисунок 4 – Математична модель двомасової системи
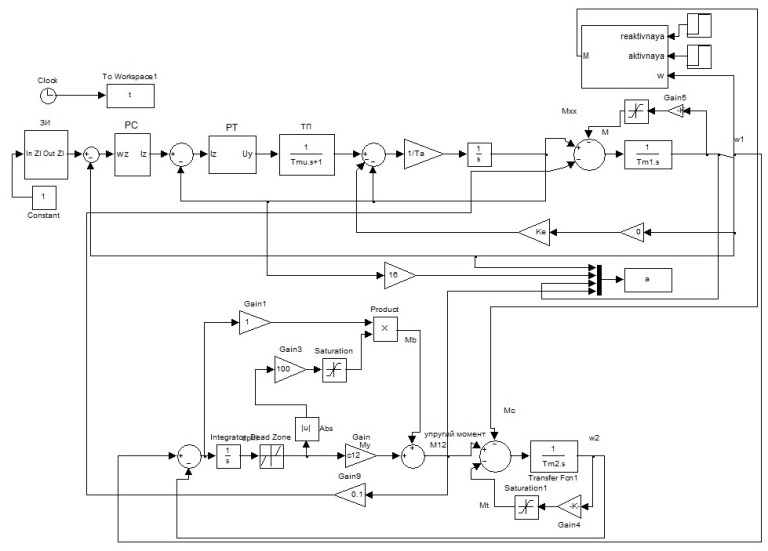
Рисунок 5 – Математична модель електромеханічної системи установки проміжної склянки
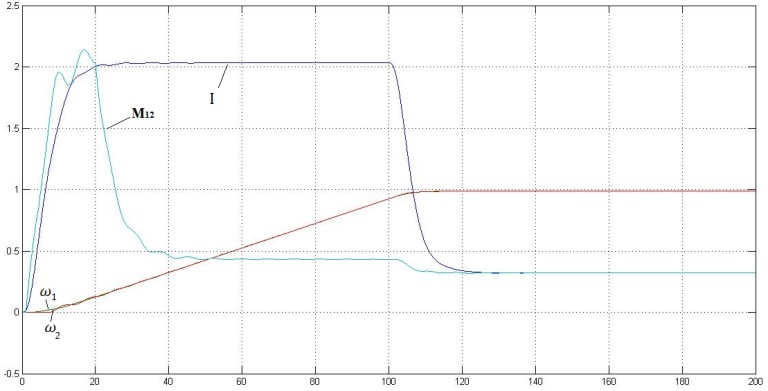
Рисунок 6 – Характер зміни струму, пружного моменту і швидкостей розрахункових мас
Висновки
В даному рефераті був розглянут роботизований комплекс для заміни склянки на ділянці проміжний ківш-кристалізатор. Було проведено дослідження кінематики та динаміки маніпулятора з метою коригування конструкторських рішень, прийнятих на попередніх етапах проектування. Розроблена математична модель двумасової системи на основі двигуна постійного струму. Як видно з розрахункових осцилограм пуск системи супроводжується незначними коливаннями, що неповинно в результаті привести до перешкод при установці склянки в направляючої.
Перелік посилань
- Процессы непрерывной разливки / А. Н. Смирнов, В. Л. Пилюшенко, А. А. Минаев и др. – Донецк: ДонНТУ, 2002. – 536 с.
- Springer Handbook of Automation / Ed. by S. Y. Nof. – Berlin: Springer Verlag, 2009. – 1812 p. – P. 450.
- Учеб. пособие для студ. вузов, обучающихся по спец.
Робототехнические системы
/ С. Ф. Бурдаков, В. А. Дьяченко, А. Н. Тимофеев – М.: Высш. шк., 1986 г. – 264 с. - Введение в специальность. В. Ф. Борисенко, – Донецк, ДонНТУ, 2014. – 357 с.
- Двухмассовая модель механической части силового канала электропривода [Электронный ресурс] – Режим доступа: http://studopedia.ru/.
- Учебные материалы для студентов [Электронный ресурс] – Режим доступа: http://vunivere.ru/.
- Синтез математической модели двухмассовой электромеханической системы/ И. А. Орловский, И. В. Блохин – ЗНТУ, Украина, 2011.