
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Анализ объекта автоматизации
- 4. Проектирование системы автоматического управления
- 5. Программное обеспечение
- Выводы
- Список использованной литературы
Введение
Автоматизация c каждым днём приобретает всё большую роль в производственной деятельности и жизни человеческого общества, в удовлетворении его растущих потребностей. В последние годы в связи с заметным уменьшением природных ресурсов, тревожными глобальными изменениями климата и ростом численности населения Земли роль автоматизации всё больше усиливается, а сферы её применения непрерывно расширяются.
Сегодня практически не существует технических процессов, которые обходятся без автоматики – начиная от простых систем, используемых в быту, и кончая сложнейшими промышленными процессами производства [3, 5]. Многие технические устройства, без которых сегодня невозможно представить себе комфортную и безопасную повседневную жизнь, стали таковыми только благодаря используемой в них автоматике.
1. Актуальность темы
На сегодняшний день вопрос стабилизации физически неустойчивых объектов является одной из самых частых проблем теории автоматического управления, с которой сталкиваются инженеры этой области. Поэтому возникает необходимость получения богатого опыта по решению подобных задач для будущих инженеров. При этом важно получение не только теоретических знаний и навыков работы с математическими моделями, а в первую очередь практических умений и опыта работы с реальными физическими объектами, физическую природу которых невозможно полностью описать с помощью модели [4].
Параллельно с этим технический прогресс идет по пути миниатюризации датчиков, исполнительных механизмов, снижения их энергозатрат, стоимости и повышения универсальности, надежности и быстродействия микросхем и микропроцессоров. Это создает возможность создания объектов, которые сочетают в себе все аппаратные средства не только для формирования управляющего воздействия, но и для измерения физических величин обратной связи и реализации сложных систем управления. Возможность полной реализации всех этих функций в середине одного объекта позволяет сделать его автономным и компактным.
Этот фактор подталкивает инженеров к созданию всё более простых механически, но всё более сложных по способу управления объектов. А это в свою очередь требует создания показательных моделей, которые помогают в понимании и изучении способов стабилизации физически неустойчивых объектов, оттачивании практических навыков по проектированию систем косвенного измерения физических величин.
Средства и решения автоматического управления постоянно совершенствуются, поэтому показательные модели должны двигаться в ногу со временем, чтобы дать верное представление о текущем состоянии проблемы автоматического управления различными объектами.
2. Цели и задачи исследования
Цель – создание лабораторной установки для изучения способов стабилизации физически неустойчивых объектов, получения практических навыков по проектированию систем управления с использованием интеллектуальных датчиков.
Назначение – разработка аппаратной части платформы в виде перевёрнутого маятника, разработка алгоритмов определения угла наклона, балансирования, перемещения и соединения с ПК и дистанционным устройством.
Основные задачи исследования:
- Анализ существующих систем стабилизации и динамического равновесия.
- Разработка математической модели объекта.
- Разработка функциональной и структурной схем объекта.
- Моделирование динамических процессов в объекте.
- Анализ существующих методов определения угла наклона конструкции и обработки показаний с датчиков.
- Синтез алгоритмов идентификации параметров балансирующего робота (параметры двигателя, угол наклона, положение в пространстве).
- Проектирование системы автоматического управления с последующим выбором компонентов.
- Создание программного обеспечения для дистанционного управления.
- Разработка стендовой модели балансирующего робота.
3. Анализ объекта автоматизации
Классическая передвижная платформа, которую имеют почти все автомобили и тележки, имеет четыре колеса. Это обеспечивает платформе баланс при движении и устойчивость, но эта конструкция имеет ряд недостатков:
• большое количество колёс приводит к увеличению габаритов платформы и количества подвижных частей, что снижает надёжность;
• невозможность установки отдельного двигателя для каждого колеса;
• расположение колёс по углам платформы приводит к необходимости установления вспомогательных узлов для передачи усилий от двигателя к колесам (дифференциал), а также для маневрирования (рулевой рычаг), что усложняет структуру и управление платформой.
Перечисленных недостатков лишена конструкция платформы в виде перевернутого маятника. Этот тип платформы имеет следующий вид: на единой колёсной оси расположены только два колеса, при этом вес платформы сосредоточен над колёсной осью (рис. 3.1).
Наличие только двух колёс уменьшает габариты и повышает надёжность, а раздельное управление каждым из них (с помощью двух двигателей) делает платформу очень манёвренной. Она может передвигаться, поддерживая баланс, а также способна выполнять разворот на месте.
Существенным недостатком является то, что такая платформа является нестабильной - если двигатели выключить, то платформа непременно упадёт, потому что центр массы платформы находится очень высоко. Но этот недостаток можно компенсировать благодаря автоматической поддержке баланса. Задав закон регулирования, есть возможность производить управляющие воздействия на двигатели постоянного тока, которые, в свою очередь, будут держать платформу в равновесии, однако для этого нужно измерять угол отклонения платформы от нормали к поверхности.
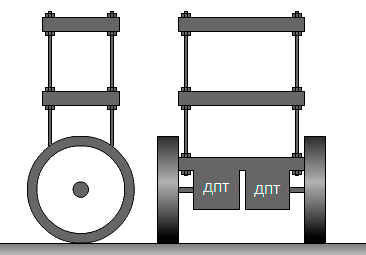
Рисунок 3.1 – Платформа в виде перевёрнутого маятника
Идея поддержания баланса достаточно проста, потому что конструкция имеет единую точку равновесия, когда центр масс груза находится непосредственно над осью вращения [1]. Если центр тяжести конструкции отклоняется в сторону, то сила тяжести частично передается через сопротивления к земле, а другая её составляющая создаёт момент вращения конструкции, который стремится завалить её на бок. Чтобы компенсировать эту силу, система должна начать движение с ускорением в сторону падения. Сила F, которую создаёт ускорение, раскладывается на силу, действующей в сторону опоры, и силу, которая создаёт обратный момент вращения конструкции (рис. 3.2).
Для поддержания баланса необходимо выполнение условия:
Но если рассматривать только малые отклонения от состояния равновесия ( α→0 ), то благодаря линеаризации можно получить более простое условие для равновесия:
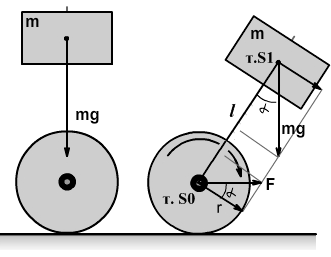
Рисунок 3.2 – Функциональная схема балансировки
Условные обозначения:
M – масса колесной базы;
m – масса груза;
α – угол отклонения маятника от нормали к земной поверхности;
т. S0 – центр масс колесной оси;
т. S1 – центр масс груза;
l – расстояние между точками S0 и S1;
g – ускорение свободного падения;
r – радиус колеса.
Также нужно учесть, что обеспечение постоянного ускорения в реальной системе – очень трудная задача и именно поэтому для поддержания баланса такая система должна не только компенсировать силу, которая заваливает конструкцию, но и понемногу восстанавливать вертикаль, то есть:
Условный принцип поддержания равновесия можно проиллюстрировать нижеприведенной анимацией.
Рисунок 3.3 – Принцип стабилизации объекта (анимация состоит из 22 кадров с задержкой в 100 мс между ними, количество циклов повторения – 7)
4. Проектирование системы автоматического управления
Согласно работам [2, 7, 8], обобщённая структурная схема САУ балансирующим роботом представлена на рисунке ниже.
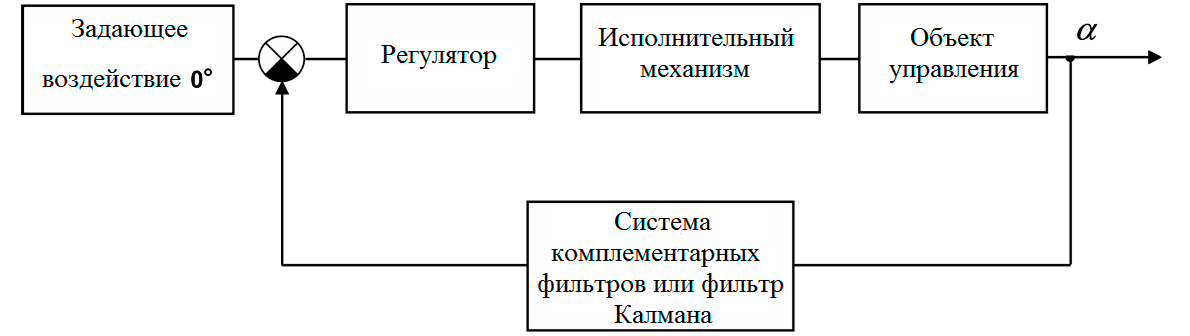
Рисунок 4.1 – Общая структурная схема системы управления
В качестве объекта управления выступает конструкция перевёрнутого маятника (подвижная платформа). Роль исполнительного механизма выполняют два двигателя постоянного тока. Для управления двигателями в системе нужен драйвер двигателей. Задачи регулирования и вычисления управляющих воздействий выполняет микроконтроллер, а закон управления реализуется и задаётся программно.
Выходом системы является угол отклонения от нормали к поверхности, измеренный с помощью микроэлектромеханических систем (МЭМС-датчиков движения), которые представляют собой объединение акселерометра и гироскопа. Целью системы является удержание угла наклона равным нулю, или близким к нулю. Функциональная схема представлена на рис. 4.2.
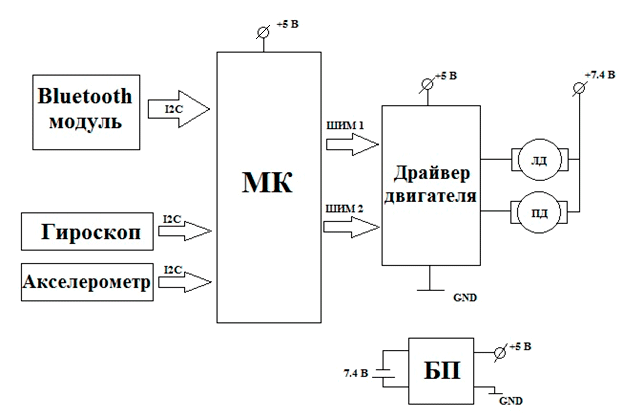
Рисунок 4.2 – Функциональная схема системы управления
Отдельно хочется отметить о выборе микроконтроллера. На сегодняшний день на рынке представлен очень широкий выбор различных интеллектуальных устройств, которые занимаются вычислениями в реальном времени. Очень популярными среди потребителей является 8-битные микроконтроллеры семейства AVR фирмы Atmel. Они очень часто применяются для решения различных задач в робототехнике.
Однако, технологический прогресс движется очень быстро и 8-битные микроконтроллеры, несмотря на простоту в их использовании, понемногу уступают место более производительным семействам, которые способны выполнять в разы больше операций в секунду и имеют больше встроенных интерфейсов, внутренних модулей и даже проще в прототипирования чем обычный 8-битный микроконтроллер AVR, такой как, например, ATMega8.
Именно поэтому было принято решение использовать в качестве вычислительного комплекса mbed микроконтроллер фирмы NXP LPC1768. Это одноплатный микроконтроллер с необходимыми средствами программирования на плате.
Рисунок 4.3 – Микроконтроллер mbed NXP LPC1768
Эта плата разработана для быстрого проектирования различных электронных устройств и роботов. Производительность этого микроконтроллера составляет около 100 MIPS. Микроконтроллер LPC1768 имеет ядро ARM Cortex-M3. Он может функционировать и заниматься вычислением при частоте 100 МГц.
Основные характеристики микроконтроллера mbed NXP LPC1768:
- высокопроизводительное ядро ARM Cortex-M3;
- частота функционирования 96 МГц;
- 32 Кб памяти RAM, 512 Кб FLASH-памяти;
- интерфейсы: Ethernet, USB, 2xSPI, 2xI2C, 3xUART, CAN;
- 6 каналов, способных выдавать ШИМ-сигнал;
- 6 каналов АЦП, 6 каналов ЦАП;
- 40-пиновый DIP форм-фактор, размеры 54х26мм;
- питание от USB или от внешнего источника 4.5-9В;
- онлайн-компилятор, среда разработки;
- встроенный drag 'n' drop Flash-программатор;
- выход стабилизированного напряжения 3.3В;
- полная программная и техническая поддержка, множество примеров программ.
Схема подключения данного контроллера представлена ниже.
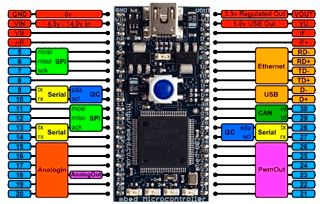
Рисунок 4.4 – Схема подключения контроллера
Благодаря аппаратной платформе mbed и богатому набору программных компонентов (готовые библиотеки, коды программ для решения различных задач, онлайн-среда разработки вместе со всем необходимым функционалом) имеется возможность очень быстро создавать программное обеспечение для систем управления, «сердцем» которых будет сам микроконтроллер mbed NXP LPC1768.
5. Программное обеспечение
Алгоритм работы программы представлен на блок-схеме ниже (рис. 5.1). После включения питания инициализируются все элементы САУ (двигатели, модуль Bluetooth, плата датчиков). После этого, из файла считываются коэффициенты регулятора и информация с гироскопа и акселерометра. Далее идёт проверка – не слишком ли велико отклонение от нормали. Если менее 150 или более 200 градусов, то это означает, что робот падает, следовательно, идёт перезагрузка контроллера и выключение двигателей. Иначе, идёт проверка на получение данных по каналу Bluetooth. Если данные передаются – то они являются управляющими воздействиями для дальнейшего движения робота. Иначе, воздействия формируются по углу отклонения от нормали для того, чтобы стабилизировать положение конструкции. После этого, робот начинает движение в соответствии с управляющим воздействием и пересчитываются значения регулятора.
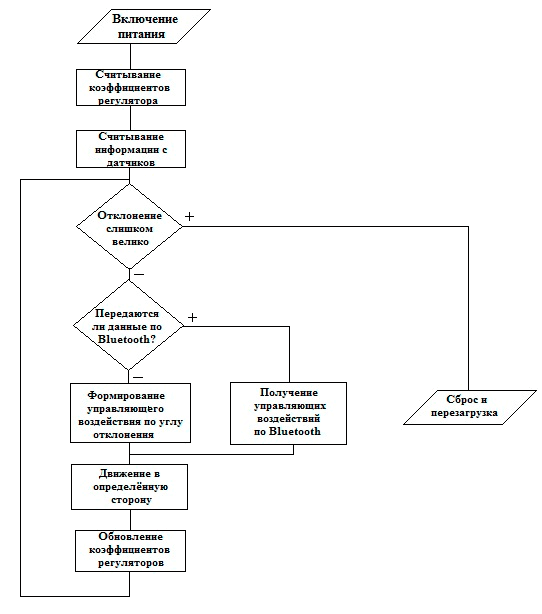
Рисунок 5.1 – Блок-схема алгоритма основной программы
Для дистанционного управления было принято решение создать приложение на операционной системе Android, использующее Bluetooth для подключения и передачи данных между устройством и САУ балансирующим роботом. Его интерфейс представлен на рис. 5.2.
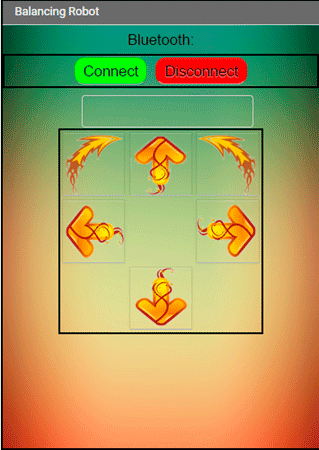
Рисунок 5.2 – Графический интерфейс приложения для дистанционного управления
При нажатии Connect из выпадающего списка можно выбрать устройство для подключения. Управляющее воздействие передаётся с помощью стрелок управления. Имеется возможность движения вперед/назад, разворота по и против часовой стрелки (двигатели работают в разных направлениях), поворота налево и направо (один из двигателей не работает).
Выводы
В работе проведено исследование методов и алгоритмов идентификации параметров [6] балансирующего робота. На первом этапе был проанализирован объект автоматизации, параметры которого надо идентифицировать и для которого синтезировать САУ и выбрать регулятор. Рассмотрены наиболее популярные решения проблемы стабилизации, перемещения, идентификации и определения угла наклона объектов в виде перевёрнутого маятника.
Далее были выбраны аппаратные компоненты системы и разработана принципиальная схема управления объектом. В последнем разделе полностью проработано программное обеспечение балансирующего робота, проработана логика дистанционного управления и создано соответствующее приложение.
Данная работа является основой для создания стендовой модели робота.
На момент написания данного реферата магистерская работа не завершена. Окончательное завершение планируется в июне 2017 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список используемой литературы
- Капица П. Л. Динамическая устойчивость маятника при колеблющейся точке подвеса. Журнал экспериментальной и теоретической физики, т. 21, вып. 5, 1951. – С. 588–597.
- Певзнер Л. Д. Теория систем управления. – М.: Издательство МГТУ, 2002. – С. 469.
- Москаленко В. В. Электрический привод: Учеб. Пособие для студентов учреждений сред. проф. Образования. – М.: Мастерство; Высшая школа, 2001. – С. 368.
- Аничкин И. М. Применение нейронной сети для управления мотоциклом.
- Брандина Е. П. Электрические машины – СПб.: СЗТУ, 2004. – С. 152.
- Симою М. Определение коэффициентов передаточных функций линеаризованных звеньев систем регулирования. Автоматика и телемеханика, 1957. – 514– С. 527.
- Льюнг Л. Идентификация систем. Теория для пользователя: М.: Наука, 1991. – С. 432.
- Дорф Р. Современные системы управления / Дорф Р., Бишоп Р; Пер. с англ. Копылова Б.И. – М.: Лаборатория Базовых Знаний, 2004. – С. 832.
