
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Асинхронный режим в электрожнергетической сети
- 3.1 Общие сведения об асинхронном режиме
- 3.2 Установившийся асинхронный режим
- 3.3 Методы борьбы с асинхронным режимом
- 4. Анализ моделей исследования
- 4.1 Математическая модель генератора
- 4.2 Подготовка исходных данных для расчета
- Выводы
- Список источников
Введение
Усложнение структуры электрических систем, вследствие их развития, решающим образом влияет на режимы этих систем и приводит к значительному увеличению объема исследований и расчетов, связанных с выявлением условий работы энергосистем при нарушениях нормального режима. Обеспечение динамической устойчивости синхронных генераторов в аварийных режимах является одной из наиболее актуальных задач управления современными электрическими станциями и системами [1].
Исследование процессов в ЭЭС при нарушении динамической устойчивости сама по себе довольно трудоемкая задача, для решения которой требуется значительные затраты ресурсов и времени. Это связано с тем, что на протекания асинхронного режима влияет множество различных факторов, таких как: конфигурация сети, вид используемого регулирования, текущий режим работы и так далее.
1. Актуальность темы
При больших возмущениях в электроэнергетических системах (ЭЭС) может возникать нарушение динамическая устойчивость. При эксплуатации энергосистем нарушение динамической устойчивости приводит к возникновению двухчастотного и многочастотного асинхронного хода.
Асинхронный режим является одной из наиболее тяжелых аварийных режимов, его возникновении может спровоцировать последующее развитие каскадных аварий, привести к необратимым повреждениям генераторов и турбин, принести непоправимый вред другому электрооборудованию. Кроме того асинхронный режим одной машины может привести к выходу из синхронизма других генераторов объединённой энергосистемы [2–4].
В связи с этим возрастает актуальность задачи оценки допустимости асинхронных режимов.
Вместе с этой задачей возникает необходимость моделирования динамических процессов происходящих в сети, для их дальнейшего исследования. Для повышения точности анализа допустимости АР необходимо применение математических моделей, которые максимально корректно описывают поведение ЭЭС в переходном режиме.
2. Цель и задачи исследования, планируемые результаты
Целью работы является анализ и исследование подходов и методов оценки допустимости асинхронных режимов в электрических системах.
Основные задачи исследования:
- Исследование существующих методов анализа допустимости асинхронного режима, оценка их достоинств и недостатков.
- Исследование асинхронных режимов вЭЭС.
- Исследование математических моделей генератора для проведения моделирования асинхронного режима.
Объект исследования: анализ допустимости всинхронного режима.
Предмет исследования: модель участка электроэнергетической сети, реализованная в программном комплексе PowerFactory.
В рамках магистерской работы планируется получение актуальных научных результатов по следующим направлениям:
- Выявление оптимальной математической модели генератора для анализа допустимости асинхронного режима.
- Выявление критериев допустимости асинхронного режима.
- Модификация известных методов анализа опустимости асинхронного режима .
3. Асинхронный режим в электрожнергетической сети
3.1 Общие сведения об асинхронном режиме
Асинхронный режим – режим работы генератора, при котором скорость вращения ротора в значительной степени отклоняется от синхронной скорости сети. Этот режим характеризуется следующими изменениями:
- глубокими и устойчивыми колебаниями параметров режима (напряжений, токов, мощностей);
- изменением взаимного угла ЭДС;
- возникновение разности частот частями энергосистемы.
Асинхронный режим может приводить к повреждени. оборудования на электростанции, массовому нарушению электроснабжения потребителей, полной потере контроля режима энергосистемы и развалу электроэнергетической системы.
Оборудование электростанции работает в режиме периодических изменений токов и напряжений, при этом в замкнутых контурах ротора возникают вихревые токи, вызывающие его перегрев.
Асинхронный режим может возникнуть в ряже следующих случаев:
- при перегрузке ЛЭП по условиям статической устойчивости;
- при нарушении динамической устойчивости;
- несинхронные включения линий электропередач и генераторов;
- при потере генератором возбуждения.
3.2 Установившийся асинхронный режим
Асинхронный режим главным образом характеризуется разностью скоростей вращения векторов ЭДС генератора и системы. Разность этих частот определяется скольжением.
Установившийся асинхронный режим возникает при возникновении баланса между моментом турбины и асинхронным моментом, характеризуется скольжением S, которое определяется точкой пересечения характеристик момента турбины и асинхронного момента (рис. 1).
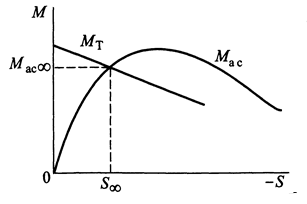
Рисунок 1 – Определение скольжения в установившемся режиме
Если выпавшая из синхронизма машина при этом остается возбужденной, на вал генератора также будет действовать синхронный вращающий момент. Этот знакопеременный момент будет вызывать периодические изменение скорости вращения ротора в асинхронном режиме и как следствие пульсации скольжения (рис. 2).
При этом параметры режима существенно изменяются.
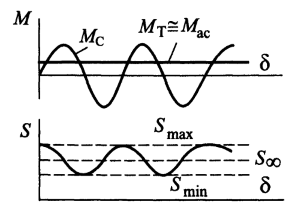
Рисунок 2 – Изменение моментов и скольжения в асинхронном режиме
3.3 Методы борьбы с асинхронным режимом
Асинхронный режим является серьезным нарушением нормального режима работы, опасным для оборудования и потребителей и должен устранятся устройствами автоматической ликвидации асинхронных режимов (АЛАР). В случае непрекращающегося асинхронного режима он должен быть ликвидирован диспетчером вручную [5].
АЛАР является одним из наиболее ответственных устройств противомалярийной автоматики. Она срабатывает после нарушения устойчивости, при возникновении асинхронного режима, а работа другой автоматики оказалась неэффективна [6]. Однако для успешного срабатывания устройств АЛАР требуется выполнение нескольких условий:
- исключение случаев ложного срабатывания без наличия асинхронного режима;
- исключение случаев ложного срабатывания при синхронных качаниях;
- ликвидация асинхронного режима должна производиться как можно быстрее, так как токовые устройства являются в большинстве своем резервными.
Выявление возникновения асинхронного режима является отдельной задачей, для ее решения устройства противоаварийной автоматики могут контролировать следующие параметры:
- разность фаз между векторами напряжения по концам электропередачи и скорость ее нарастания;
- разность фаз между векторами напряжений в расчетных точках по обе стороны от места установки устройства;
- ток и направление мощности по линии электропередачи;
- входное сопротивление сети в контролируемой точке передачи и направление мощности;
- положение электрического центра качании и знак скольжения асинхронно движущихся частей ЭЭС [7].
В случае выявления асинхронного режима, должны быть приняты меры к восстановлению синхронизма, то есть восстановлению нормальной работы генератора. При неустойчивого асинхронном режиме ресинхронизация происходит сама, без воздействия защит или персонала. В противном случае необходимо принять дополнительные меры для создания условий способствующих ресинхронизации, такие как:
- частичное отключение потребителей;
- уменьшение генерирующей мощности путем воздействия регулятора турбины или отключения части генераторов [8, 9].
В случае когда рессинхронизация по какой либо причине невозможна, применяется деление энергосистемы.
В настоящее время в качестве устройств выявления и ликвидации асинхронного режима в электрической сети используются как электромеханические и электронные устройства АЛАР, так и микропроцессорные устройства.
Многие современные микропроцессорные устройства копируют алгоритмы работы традиционных электромеханических устройств. В следствии этого они, как правило имеют и их недостатки:
- невозможность выявления АР при большом скольжении (в наиболее тяжелых случаях этого режима), связанная с ограниченным быстродействием электромеханических реле, сравнимым с возможной длительностью АР, а также с несовершенством выявления первого цикла асинхронного хода;
- сложность и недостаточная надёжность согласования статических и динамических характеристик срабатывания разнотипных реле (тока, сопротивления, мощности), приводящие к отказу устройства АЛАР при повышенных скольжениях в условиях АР и, кроме того, вызывающие значительные затруднения при настройке устройств;
- зависимость функционирования от вида нагрузки в месте установки.
Также одной из основных задач, при работе с АЛАР, является его настройка, которая представляет собой довольно трудоемкий процесс. Получение корректных настроек напрямую связано с многократной имитацией работы автоматики на совокупности исходных данных, характеризующих собой переходные процессы с возникновением асинхронных режимов [7].
4. Анализ моделей исследования
4.1 Математическая модель генератора
Для оценки допустимости асинхронных режимов в конкретных электрических системах, выбора необходимых управляющих воздействий, направленных на скорейшее их прекращение и обеспечение успешной ресинхронизации, необходимо определять параметры этих режимов.
Как было сказано ранее, одним из наиболее сложных элементов электроэнергетической сети является синхронный генератор. Именно он в значительной степени определяет протекания переходного процесса и параметры режима. Для повышения точности моделирования можно пойти двумя путями:
- уточнение математической модели генератора;
- уточнение модели системы регулирования генератора.
Оба этих метода позволяют повысить точность моделирования динамических процессов, однако, при этом возрастает сложность расчета. В большинстве случаев идут по первому пути, применяют более точную модель генератора, при этом использую упрощенную модель системы регулирования.
Достоверность расчета асинхронного режима, при использовании такой схемы, в значительной мере определяется правильностью учета физических явлений, происходящих при переходных процессах в роторе генератора. Наиболее полно и точно эти явления воспроизводятся с помощью эквивалентных многоконтурных схем замещения, синтезированных по экспериментальным частотным характеристикам проводимости со стороны обмотки статора.
Вид многоконтурной схем замещения по продольной оси ротора турбогенератора показан на. рис. 3.
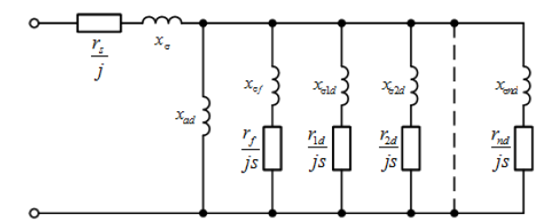
Рисунок 3 – Многоконтурная схема замещения по оси d
Параметры указанных схем замещения определяют коэффициенты дифференциальных уравнений электромагнитного состояния типа уравнений Парка-Горева, которые имеют следующий вид: [10].
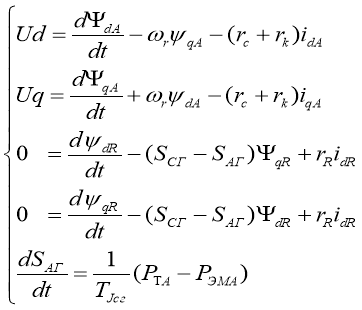
Поскольку подробный учет всех свойств приводит к существенному увеличению времени и сложности расчета, то при разработке методики анализа асинхронных режимов существенное значение имеет использование упрощенных математических моделей синхронных машин, с достаточной полнотой учитывающих их статические и динамические характеристики.
Решение системы дифференциальных уравнений, даже для простых схем, достаточно сложный процесс. В связи с этим, эту задачу перекладывают на известные программные комплексы: PowerFactory, Spice, Saber, MathLAB и др. Во всех этих программных комплексах реализована схема замещения минимальной сложности, которая учитывает один демпферный контур с обмоткой возбуждения по оси d и 2 контура по оси q.
При этом возможны два варианта задания исходных данных:
- синхронные, переходные и сверхпереходные индуктивные сопротивления и постоянные времени по осям симметрии ротора;
- непосредственно параметры схемы замещения с демпферными контурами.
В программном комплексе PowerFactory, который используется в учебном процессе в Донецком Национальном Техническом Университете и данной работе. В данной программе предусмотрено использование в качестве исходных данных постоянных времени синхронного генератора.
Такое задание данных несколько усложняет расчет по причине не полноты информации в справочной литературе. В [11] имеются методики пересчета постоянных времени в параметры схемы замещения.
В связи с вышесказанным, перед началом расчета следует выполнить следующее:
- упростить схему замещения синхронного генератора, путем уменьшения количества контуров до требуемого количества;
- провести пересчет параметров схемы замещения к постоянным времени.
4.2 Подготовка исходных данных для расчета
На практике, полученные на основании экспериментальных исследований параметры схем замещения учитывают большее число контуров, нежели реализовано в используемом программном комплексе. Для этого по методике, изложенной в [11], необходимо уменьшить число демпферных контуров в схеме.
На примере генератора ТГВ–200 рассмотрим влияние количества контуров на погрешность расчета. Данный тип генератора имеет 3 демпферных контура по оси d и 7 контуров по оси q.
Для расчета в PowerFactory данные схемы были преобразованы к виду приведенному на рис. 4.
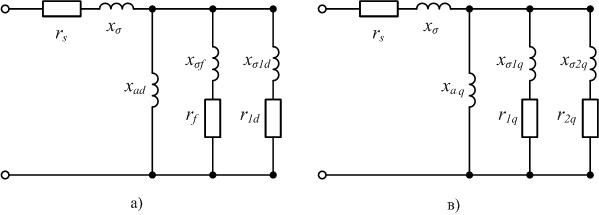
Рисунок 4 – Схемы замещения используемые в программном комплексе PowerFactory
a – по оси d; в – по оси q
За основу были взяты параметры многоконтурной схемы замещения генератора, полученные на основании частотных характеристик, опубликованные в [12].
На рис. 5 представлена как изменяется частотная характеристика при изменении числа контуров схемы замещения по оси d.
Рисунок 5 – Частотная характеристика генератора по оси d
Аналогичные преобразовывания претерпевает схема замещения по оси q. Результат преобразования представлен на рис. 6
Рисунок 6 – Частотная характеристика генератора по оси d
Из-за упрощения схемы замещения, в ходе преобразования происходит искажение частотной характеристики (рис. 6 красная кривая). Однако ее форма в целом остается похожей на исходную характеристику (синяя кривая). Кроме этого при малых скольжениях, т.е. в рабочей зоне генератора (начало частотной характеристики), кривая полностью повторяет исходную.
Вывод
На момент написания данного реферата магистерская работа еще не завершена. Предполагаемая дата завершения: май 2019 г. В данный реферат будут вноситься изменения по мере выполнения работы. Окончательную работу можно будет получить у автора или его руководителя после указанной даты завершения написания.
В работе планируется детальное рассмотрение общих положений вопросов допустимости асинхронных режимов. Проведение анализа оптимальных математических моделей синхронного генератора.
В рамках работы планируется выполнить:
- моделирование асинхронных режимов, вызванных различными возмущениями в ЭЭС в программном комплексе PowerFactory;
- проанализировать допустимость асинхронных режимов;
- проанализировать влияние различных факторов на протекание асинхронного режима.
Список источников
- Андерсон П. Управление энергосистемами и устойчивость / Андерсон П., Фуад А.; пер. с англ. под ред. Я. Н. Лугинского. – М.: Энергия, 1980. – 568 с.
- Савалов С. А. Противоаварийное управление в энергосистемах // Савалов С. А., Семенов В. А. М.: Энергоиздат, 1988, 416 с.
- Pourbeik P. The anatomy of a power grid blackout // Pourbeik P., Kundur P. S., Taylor C. W. IEEE Power and Magazine, 2006, Vol.4, No.5, p.22-29.
- Makarow Yu. V. Blackout prevention in the United States, Europe and Russia // Makarow Yu. V., Reshetov V. I., Voropai N. I. Proccedings of the IEEE, 2005, Vol.93, No.11, p.1942-1955.
- Федотов А. И., Лопухов В. М., Соколов В. А., Зайцев Д. А. Автоматика ликвидации асинхронного режима на блоках с турбогенераторами средней мощности / Известия высших учебных заведений. Проблемы энергетики. 2007. № 7-8. С. 66-71.
- Веников В. А. Переходные электромеханические процессы в электрических системах: Учеб. для электроэиергст. спец. Вузов. – 4-е изд., перераб. и доп. – М.: Высш. шк., 1985. – 536 с, пл.
- Наровлянский В. Г., Ваганов А. Б., Иванов И. А. Результаты испытаний устройства ликвидации асинхронного режима АЛАР-М / Релейная защита и автоматизация. 2010. № 1. С. 16-18.
- Камель Н. А. Разработка и исследование методов анализа асинхронных режимов в энергосистеме и протавоаварийной автоматики для их ликвидации: дис. дис. к. т. н: 5.14.02: защищена 1.02.1995 – М., 1995.
- Матвеев И. В., Пастухов B. C., Иванов К. М. Автоматика ликвидации асинхронного режима (АЛАР) / Вологдинские чтения. 2008. № 69. С. 96-98.
- Ульянов С. А. Электромагнитные переходные процессы в электрических системах / Ульянов С. А. – 2012. – 512 с.
- DIgSILENT Technical Documentation Synchronous Generator. Published by DIgSILENT GmbH, Germany. Copyright 2007. All rights reserved. Unauthorized copying or publishing of this or any part of this document is prohibited. TechRef ElmSym V1 Build 331 30.03.2007
- Сивокобыленко В. Ф. определение параметров схем замещения синхронных машин / В. Ф. Сивокобыленко, В. К. Лебедев // Научные труды ДонГТУ, серия Электромеханика и электроэнергетика, вып 1. – Донецк – 1996. – С. 98-102.