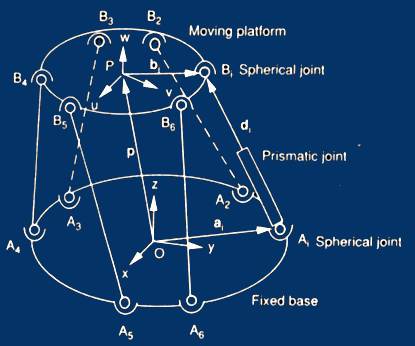
Задача управління паралельним маніпулятором складається з тім, щоб переміщати рухливу платформу маніпулятора - робочий орган - відповідно до заданої траєкторії. Переміщення платформи здійснюється за допомогою шести з'єднань (ніг) механізму. У нашому випадку є задане положення й орієнтація рухливої платформи, щодо бази. Для моделі платформи вхідними змінними будуть шість сил, що впливають на ноги, а вихідними - довжини й швидкості ніг.
Традиційний метод проектування регуляторів для САУ паралельних маніпуляторів вимагає використання складних диференціальних рівнянь, що відображають механічні компоненти механізму. Потім необхідно вирішувати ці рівняння, що є непростою задачею. Цього можна уникнути, використовуючи програмне забезпечення, що моделює механічні об'єкти.Для моделювання механічної частини буде використаний MATLAB/ SimMechanics, а для моделювання регулятора - Simulink.
Для початку необхідно створити механічну модель паралельного маніпулятора. Механічна частина маніпулятора складається з нерухомої платформи - бази, рухливої платформи й шести з'єднань (ніг), що з'єднують ці платформи. Ноги складаються із двох тіл, з'єднаних циліндричними з'єднаннями. Верхня й нижня частини кожної ноги (у дельнейшем будемо називати їх верхня й нижня нога) прикріплюються до платформ карданними з'єднаннями.
Для імітації нерухомої платформи використається блок Ground. Цей блок з'єднується із блоком карданного з'єднання, якому з іншої сторони прикріплюється блок, що імітує механічне тіло. Таким чином, виходить нижня нога. Аналогічним образом одержуємо верхню ногу, однак прикріплюємо її до рухливої платформи. Потім за допомогою циліндричного з'єднання поєднуються обидві ноги. Для моделювання руху ноги використається блок Joint Actuator, на вхід якого подається сформований керуючий сигнал від регулятора. За допомогою блоку Joint Sensor виміряється швидкість і положення ноги.
Всі елементи моделі ноги поєднуються в один блок, тобто формується підсистема. Тепер можна збирати в SimMechanics механічну модель усього паралельного маніпулятора:
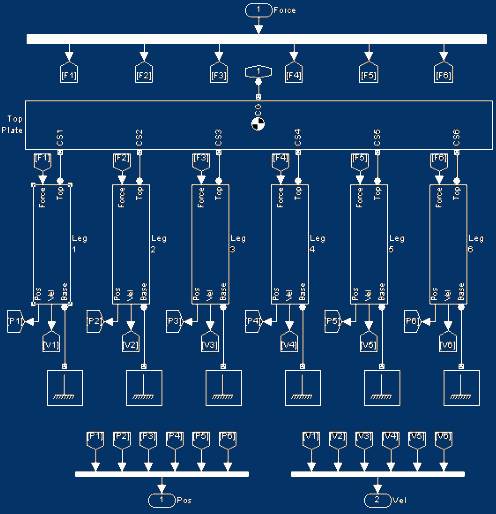
Розглянемо цю модель. Керуючий вплив, формований регулятором, подається на демультиплексор, що має шість виходів. Сигнали із цих виходів є вхідними сигналами для блоків Joint Actuator кожної ноги. Всі шість ніг впливають на рухливу платформу - блок Top Plate. Підсистема кожної ноги має два вихідних сигнали: положення й швидкість. Вони є сигналами зворотного зв'язку для регулятора. Таким чином, ми одержали модель паралельного маніпулятора. Дана модель також оформляється у вигляді підсистеми.
Головним призначенням регулятора в системі керування паралельним маніпулятором є визначення траєкторії рухливої платформи при перекладі її в задане положення. Ця траєкторія потім перетворює в бажані траєкторії ніг, використовуючи зворотний кінематичний аналіз. Нарешті, регулятор формує вплив, що задає, для кожної ноги, щоб випливати бажаної траєкторії.
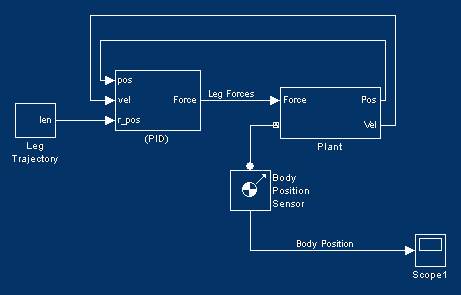
Як регулятор візьмемо ПІД- регулятор. Його входами є поточне положення й швидкість, а також бажане положення ніг.
Збираємо модель системи керування й об'єкта керування з отриманих підсистем. Ця системі зображена на наступному малюнку:
Паралельні маніпулятори мають наступні переваги перед послідовними: більше висока твердість системи, краща вантажопідйомність і менша інерція. До недоліків паралельних роботів варто віднести менший робочий простір у порівнянні з послідовними й більше складну конструкцію механізму
Однак поряд із зазначеними перевагами МПКС у порівнянні із класичними роботами мають гірше співвідношення робочого простору й габаритів самого робота, а також, найчастіше, дуже обмежені кути повороту робочого органа. Крім того, у процесі роботи маніпулятора виникають так називані «особливі положення», у яких з'єднання маніпулятора можуть перетинатися, що може привести до виходу з ладу апарата. Тому, система керування такого маніпулятора повинна не тільки забезпечувати вимоги по швидкодії, перерегулюванню й т.п., але й уникати особливих положень.
Область застосування механізмів з паралельними кінематичними зв'язками дуже широкаі: сучасні многокоординатные фрезерні й свердлильні верстати, сімулятори літальних апаратів, регульовані шарнірні ферми, машини для шахт, самописи т.д. Масштабованість МПКС дозволяє легко будувати на їхній основі великогабаритні верстати. Високі швидкості й більші прискорення МПКС привабливі для створення різних промислових роботів або платформ, наприклад, для телескопів, лазерів, телекомунікаційних антен або реактивних двигунів.
Перелік посилань
наверх
| 1. |
Lung-Wen Tsai. Robot Analysis: The mechanics of serial and parallel manipulators.– New York: John
Wiley&Sons Inc., 1999. – 505С. |
| 2. |
"Geometric Analysis of Parallel Mechanisms"; Ilian Bonev.
Інтернет-джерело . |
| 3. |
"Robust Adaptive Control of a Hexaglide Type Parallel Manipulator"; John Phil Kim, Sung-Gaun Kim, Jeha Ryu.
Інтернет-джерело . |
| 4. |
Скляренко Е.Г. "Оптимизация конструкции механизма с параллельными кинематическими связями и шестью степенями свободы." |
| 5. |
"Simulink 4. Специальный справочник" В.Дьяконов- Санкт-Петербург, 2002. – 517С. |
| 6. |
http://www.parallemic.org |
| 7. |
http://www.mathworks.com |