ДонНТУ > Портал магистров ДонНТУ

Викторова Ирина Викторовна
Факультет: Электротехнический (ЭТФ)
Кафедра: Электрических станций (ЭС)
Специальность: «Электрические станции» (ЭС)
Тема квалификационной работы магистра:
«Разработка математической модели для анализа переходных процессов узлов энергосистем с синхронной нагрузкой»
Научный руководитель: к.т.н., доцент кафедры ЭС Лебедев Виктор Константинович
Материалы по теме магистерской работы:
Реферат по теме выпускной работы
Содержание
1. Введение. Обоснование актуальности темы
2. Связь работы с научными темами, планами и программами
3. Цель и задачи
4. Научная новизна
5. Обзор исследований и разработок по теме
• Локальный обзор (по Донецку)
• Национальный обзор (в Украине)
• Глобальный обзор (в мире)
6. Основное содержание работы
Выводы
Перечень публикаций и материалов по теме выпускной работы
Примечание
1. Введение. Обоснование актуальности темы
2. Связь работы с научными темами, планами и программами
3. Цель и задачи
4. Научная новизна
5. Обзор исследований и разработок по теме
• Локальный обзор (по Донецку)
• Национальный обзор (в Украине)
• Глобальный обзор (в мире)
6. Основное содержание работы
Выводы
Перечень публикаций и материалов по теме выпускной работы
Примечание
1. Введение. Обоснование актуальность темы
В электрических системах довольно часто встречаются узлы нагрузки, состоящие из подключенных к ним только синхронных двигателей. Примером могут служить системы электроснабжения магистральных газо− и нефтепроводов, в которых используются синхронные двигатели большой единичной мощностью до 12,5 МВт при общем количестве двигателей, подключенных к узлу, до двадцати четырех. Такие узлы мощной синхронной нагрузки могут оказывать существенное влияние на уровни токов короткого замыкания, статическую и динамическую устойчивость энергосистем. Синхронная нагрузка узла имеет меньшую постоянную инерции, чем генераторы электрических станций, а характеристика системы возбуждения синхронных двигателей зависима от напряжения источника питания. Это определяет высокую чувствительность синхронных двигателей к кратковременным посадкам напряжения, приводит к быстрым нарушениям их устойчивости и последующим отключениям. Резкий сброс нагрузки может привести к необходимости разгрузки генераторов электрических станций. Как известно [9], важнейшим эксплуатационным режимом, обеспечивающим непрерывность технологических процессов, является самозапуск двигателей. Успешность самозапуска и характер протекания электромеханического процесса определяется характеристиками двигателей, приводных механизмов, питающей сети и частотой вращения синхронного двигателя в момент подачи резервного питания. В зависимости от вида производства максимально допустимое время перерыва питания может колебаться от 0,1 с до нескольких секунд. Если по условиям технологии производства недопустимы длительные перерывы питания, то при восстановлении напряжения действием устройств АПВ и АВР может возникнуть опасность несинхронного включения двигателя, когда угол между ЭДС синхронной машины и напряжением сети находится в пределах 120-240° [9, 40, 70]. Возникающие при этом токи и моменты могут стать причиной механического повреждения двигателя или механизма. Обеспечение надежной работы узлов синхронной нагрузки требует индивидуального подхода в каждом конкретном случае, в зависимости от требований технологии производства, типа применяемых синхронных двигателей и механизмов, структуры схемы электроснабжения и невозможно без четкого представления поведения синхронных машин при перерывах питания, вызванных короткими замыканиями, работой устройств АПВ и АВР. В связи с этим актуальным вопросом является разработка математических моделей для такого типа узлов нагрузки и использование их при исследовании переходных режимов работы.
2. Связь работы с научными темами, планами и программами
Квалификационная работа магистра выполнялась на протяжении 2009-2010 гг. в соответствии с научным направлением кафедры «Электрические станции» Донецкого национального технического университета.
3. Цель и задачи
Цель работы
Целью работы является разработка математической модели узлов энергосистемы с синхронной нагрузкой и создание программы для расчета и анализа переходных процессов.
Основные задачи исследований
-
для расчетной схемы составить дифференциальные уравнения, описывающие переходные процессы;
-
разработать алгоритм расчета математической модели;
-
реализовать алгоритм на языке программирования Visual C++;
Методика и методы исследования
Метод основан на использовании полных дифференциальных уравнений и их численного решения на ЭВМ для всех основных элементов указанной схемы (питающих линий, трансформатора, статической нагрузки и СД, шунтов к. з.).
4. Научная новизна
Научной новизной в данной работе является разработка программы на языке визуального программирования С++, позволяющая рассчитывать переходные процессы в узлах энергосистемы с синхронной нагрузкой. Разработанная программа расчета переходных процессов в узлах энергосистем с синхронной нагрузкой будет использована в курсовом и дипломном проектировании студентов кафедры «Электрические станции». Доклад по теме работы «Математическая модель узла синхронной нагрузки» представлен на конференции ко «Дню науки-2010» ДонНТУ кафедры электрические станции. Донецк,ДонНТУ-2010.
Также был сделан доклад на Одесской интернет-конференции 2010 году.
5. Обзор исследований и разработок по теме
• Локальный обзор (по Донецку)
Похожая тема уже рассматривалась на кафедре «Электрические станции» Донецкого национального технического университета в 2001 году студентом Неведомым Сергеем Александровичем. Тема его магистреской работы звучала следующим образом: «Анализ режимов группового выбега электродвигателей». Новизной данной работы являлось использование разработанных аналитических выражений для существующих ранее математических моделей с учетом видов двигательной нагрузки и взаимообмен запасенной ими электромагнитной энергией.
• Национальный обзор (в Украине)
Кандидатами технических наук А.Н. Бесараб, В.Н. Невольниченко разработана упрощенная модель расчета электромагнитных переходных процессов исследуемых двигателей и электромеханических переходных процессов в многомашинной системе с разомкнутой сетью произвольной конфигурации.Исследуемые электрические двигатели моделируются по полным уравнениям, а электрическая сеть - уравнениями установившегося режима.
• Глобальный обзор (в мире)
На кафедре «Электрические системы и сети» Электромеханического факультета СПбГТУ разрабатывались математические модели переходных процессов электроэнергетических систем, достаточно глубоко прорабатывались вопросы математического моделирования энергосистем при решении задач динамической устойчивости: количественно оценивалось влияние насыщения стали генераторов, демпферных обмоток, переходных процессов в цепях статора, характеристик нагрузок, регулирования турбин,на кафедре развито новое научное направление: математическое моделирование переходных процессов в электрических системах, содержащих управляемые шунтирующие реакторы любых конструкций, и анализ динамических переходных процессов, устойчивости и перенапряжений в таких электропередачах.
6. Основное содержание работы
Схема электроснабжения узла синхронной нагрузки показана на рис. 6.1, в которой используется трансформатор с расщепленной обмоткой 6-10 кВ и обмоткой высшего напряжения, подключенной к линиям энергосистемы. К сборным шинам 6-10 кВ кроме СД подключена статическая нагрузка и шунты для моделирования различной степени удаленности коротких замыканий. Математическая модель трансформатора и других статических элементов была рассмотрена в разделе 2, поэтому основное внимание в этом разделе уделим вопросам определения параметров схем замещения различного типа СД, преобразованию их дифференциальных уравнений к наиболее удобному виду для использования при построении математической модели всей схемы электроснабжения и особеностям моделирования различных переходных процессов. Известно, что синхронная нагрузка электрических систем оказывает значительное влияние на характер протекания переходных процессов, вызванных короткими замыканиями (к. з.), переключением питания с одного источника на другой при работе устройств АВР, АПВ и др.[1] Существуютметоды расчета токов подпитки места к. з. от синхронных двигателей (СД), группового самозапуска после перерывов питания, однако для расчета группового выбега СД используются в основном приближенные методы, основанные на результатах экспериментов [3] или на грубых допущениях [4, 5] и отсутствуют уточненные методы, позволяющие определить взаимный обмен энергией между отдельными СД, частоту вращения каждого из них, величину и частоту напряжения в узле нагрузки после потери питания, а также ударные значения токов и моментов после повторной подачи питания.
В данной работе, с целью восполнения указанных выше пробелов, для типовой схемы узла синхронной нагрузки электрической системы (рис. 6.1) предложен более точный метод расчета режимов группового выбега СД. [2]

Рисунок 6.1 - Типовая схема узла синхронной нагрузки энергосистемы
Метод основан на использовании полных дифференциальных уравнений и их численного решения на ЭВМ для всех основных элементов указанной схемы (питающих линий, трансформатора, статической нагрузки и СД, шунтов к. з.). Математические модели линий, трансформатора, шунтов и нагрузки используются в виде, аналогичном [6]. С целью упрощения математической модели всего узла нагрузки, дифференциальные уравнения СД, в отличие от использования в качестве переменных значений потокосцеплений контуров обмоток СД [7], представлены в записи относительно токов статора и ротора, что сокращает объём расчетов за счет необходимого перехода от потокосцеплений к токам на каждом шаге расчета.
В предлагаемом методе неизвестные токи всех элементов схемы находятся из решения соответствующих дифференциальных уравнений, а для определения напряжений используются связи между элементами вытекающие из уравнений первого закона Кирхгофа в дифференциальной форме для узловых токов. Рассмотрим сначала особенности уравнений элементов схемы.
Дифференциальные уравнения трехобмоточного трансформатора с расщепленной обмоткой низшего напряжения могут быть представлены в форме Коши относительно токов в обмотках в неподвижной ортогональной системе координат X, Y как:

Элементы обратной матрицы индуктивностей трансформатора определяются как:

В уравнениях (1)-(4) используются параметры схемы замещения трансформатора: ![]() - соответственно активные сопротивления и индуктивности рассеяния обмоток высокого и низшего напряжений, а также взаимная индуктивность обмоток Lm или индуктивность ветви намагничивания. Полные индуктивности контуров обмоток определяются по соотношениям:
- соответственно активные сопротивления и индуктивности рассеяния обмоток высокого и низшего напряжений, а также взаимная индуктивность обмоток Lm или индуктивность ветви намагничивания. Полные индуктивности контуров обмоток определяются по соотношениям:
![]()
Дифференциальные уравнения статических нагрузок секций 1, 2 (рис. 1), шунтов для расчета токов к. з., линий межузловых связей запишем в неподвижных координатах X, Y в форме Коши аналогично [6]:

где ![]()
![]() - соответственно активные сопротивления и индуктивности нагрузки, шунтов и линий связи.
- соответственно активные сопротивления и индуктивности нагрузки, шунтов и линий связи.
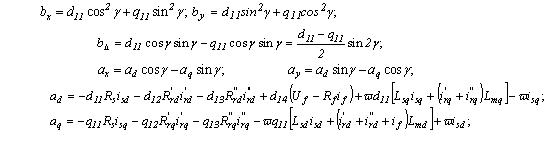
В узлах нагрузки применяются как явнополюсные синхронные двигатели, так и турбодвигатели с массивным ротором. Методики определения параметров их схем замещения по каталожным или экспериментальным данным приведены в [8]. Будем использовать наиболее универсальную схему замещения для указанных типов СД, в которой по оси d имеется обмотка возбуждения, а явление вытеснения токов в роторе учтено с помощью двух эквивалентных демпферных контуров по каждой из осей d и q. Исходные дифференциальные уравнения, записанные относительно потокосцеплений для СД во вращающейся системе координат ротора d, q в относительных единицах имеют следующий вид:

где ![]() - напряжения, потокосцепления и токи обмоток статора, возбуждения и эквивалентных демпферных контуров ротора по осям d и q.
- напряжения, потокосцепления и токи обмоток статора, возбуждения и эквивалентных демпферных контуров ротора по осям d и q.
Потокосцепления обмоток в уравнениях (9) – (18) определяются через токи по соотношениям:

Полные индуктивности контуров статора и ротора определяются по соотношениям:

Для исключения потокосцеплений из уравнений (9) – (18) подставим в них выражения (19) и получим в матрично-блочном виде дифференциальные уравнения для всех контуров СД:

Для представления полученных уравнений в форме Коши необходимо левую и правую части равенства (21) умножить слева на матрицу инверсных индуктивностей Г, обратную матрице индуктивностей СД:

при этом элементы обратной матрицы находятся по соотношениям:

а элементы матрицы b находятся по соотношениям, аналогичным (4).
В результате получим в окончательном виде систему дифференциальных уравнений СД девятого порядка (23), записанную в форме Коши и приведенную в матричном виде ниже:

Для определения напряжений в узлах 1, 2, 3 рассматриваемой схемы (рис. 1) необходимо составить уравнения связи между элементами схемы, в качестве которых будем использовать первый закон Кирхгофа в дифференциальной форме, записанный для производных узловых токов в неподвижной ортогональной системе координат X,Y или в фазных координатах.
Так как уравнения статических элементов схемы (1), (2), (3), (6), (7) и (8) были записаны в неподвижной системе координат X,Y, а уравнения каждого СД решаются в собственных координатах d, q, то требуется определение выражений для производных от токов статора каждого СД в неподвижных осях X,Y.
С учетом матрицы П прямого преобразования переменных при переходе от осей d, q к неподвижным осям X,Y и матрицы П обратного перехода получим формулы для производных токов статора СД в осях X,Y и напряжений статора СД в осях d, q, которые требуются нам в дальнейшем:

Заменив в (26) производные для токов статора их значениями из (23) с учетом (25), получим выражения для производных токов статора СД в осях X,Y:

где
Для узлов расчетной схемы 1, 2, 3, согласно первому закону Кирхгофа, записанному в дифференциальной форме, справедливы следующие выражения:

Подставив в (28) полученные ранее выражения для производных токов из (1), (2), (3), (6), (7), (8) и (27) получим систему из шести алгебраических уравнений, записанную относительно неизвестных напряжений в узлах расчетной схемы в системе неподвижных ортогональных координат X,Y:


(выполнено в GIF ANImator, объем - 160 Kb, 7 кадров, 5 повторений)
Используя выражение (29) на каждом шаге расчета определяются неизвестные напряжения в узлах расчетной схемы узла энергосистемы, а затем находятся токи всех элементов схемы из численного решения соответствующих дифференциальных уравнений.
Разработанная математическая модель позволяет рассчитывать режимы пуска, группового выбега, самозапуска, короткого замыкания, исследовать режимы синхронных и несинхронных включений двигательной нагрузки. Режимы коммутаций, вызванные отключением источника питания, моделируются аналогично описанному способу.[6]
Выводы
1. Предложен метод расчета режимов группового выбега синхронной нагрузки при кратковременных перерывах питания. Метод основан на математическом моделировании поведения узла синхронной двигательной нагрузки по полным дифференциальным уравнениям всех элементов схемы электроснабжения. Дифференциальные уравнения записаны относительно производных токов, что упрощает расчеты при реализации на ЭВМ многоузловой системы электроснабжения.
2. Разработанная математическая модель позволяет анализировать режимы пуска, группового выбега, коротких замыканий, самозапуска, синхронных и несинхронных включений синхронных двигателей и может быть использована как в условиях эксплуатации, так и при проектировании узлов нагрузки, содержащих синхронные двигатели.
3. Рассмотрены способы определения параметров эквивалентных схем замещения явно- и неявнополюсных синхронных двигателей по исходным каталожным данным. За основу принято представление демпферных контуров и массива ротора в виде многоконтурных R, L-цепей, значения которых находят из решения соответствующих систем уравнений.
4. Для определения начальных значений интегрируемых переменных в многомашинной системе электроснабжения разработан метод расчета доаварийного режима, основанного на использовании уравнений всех элементов для стационарных режимов и метода итераций.
Перечень публикаций и материалов по теме выпускной работы
-
Сыромятников И.А. Режимы работы асинхронных и синхронных двигателей. – М.: Энергоатомиздат, 1984. – 240 с.
-
Баков Ю.В. Проектирование электрической части электростанций с применением ЭВМ: Учеб. пособие для вузов. – М.: Энергоатомиздат, 1991. – 272 с.
-
Ойрех Я.А., Сивокобыленко В.Ф. Режимы самозапуска асинхронных двигателей. – М.: Энергия, 1974. – 96 с.
-
Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. – М.Л., Госэнергоиздат, 1963. – 744с.
-
Павлюк К., Беднарек С. Пуск и асинхронные режимы синхронных двигателей. Пер. с польск. М., – Энергия, 1971. – 272 с.
-
Сивокобыленко В.Ф., Лебедев В.К., Кукуй К.А. Математическое моделирование асинхронной нагрузки в режимах группового выбега и самозапуска. – Сб. научн. трудов ДонНТУ. Серия: электротехника и энергетика, вып. 41: – Донецк: ДонНТУ, 2002. – с. 28-34.
-
Сивокобыленко В.Ф. Переходные процессы в многомашинных системах электроснабжения электрических станций: Уч. пособие. – Донецк, ДПИ, 1984. – 116 с.
-
Сивокобыленко В.Ф., Костенко В.И. Математическое моделирование электродвигателей собственных нужд электрических станций. Донецк, ДПИ, 1979. – 110 с.5.
-
Метод расчета группового выбега синхронной нагрузки электрических систем. Сивокобыленко В.Ф., Лебедев В.К., Кукуй К.А. http://masters.donntu.ru/2004/eltf/gorbenko/library/stat1.pdf
-
Чабан В.И. Основы теории переходных процессов электромашинных систем. - Львов: Вища школа. Изд-во при Львов. ун-те, 1980. - 200 с.
Примечание
При написании данного автореферата магистерская работане завершена. Окончательный вариант работы можно получить у автора или научного руководителя после декабря 2010 года.