
Реферат з теми магістерської роботи
- 1.Актуальність теми роботи
- 2.Цілі и задачі, заплановані практичні результати
- 3.Власні результати
- 3.1.Віртуальний стенд з дослідження двоконтурної системи підпорядкованого регулювання швидкості електроприводу постійного струму
- 3.2.Віртуальний стенд для дослідження системи векторного керування асинхронним двигуном
- 4.Висновки
- 5.Список використаної літератури
1. Актуальність теми роботи
Актуальність роботи полягає в необхідності впровадження нових методів і засобів в учбовий процес з метою підвищення якості підготовки фахівців-електромеханіків, особливо в умовах дистанційного і заочного навчання.
Основною особливістю вищої технічної освіти є необхідність в організації і проведенні ефективного лабораторного практикуму з професійно-орієнтованих і спеціальних дисциплін. Ця необхідність обумовила створення віртуального лабораторного комплексу, який відповідає реальному фізичному лабораторному стенду [1]. Один із найбільш підходящих програмних пакетів для розробки таких віртуальних стендів — програмний пакет LabVIEW, який має надто зручний для користувача інтерфейс і потужні засоби графічного програмування. LabVIEW (Laboratory Virtual Instrument Engineering Workbench) дозволяє розробляти прикладне програмне забезпечення для організації взаємодії з вимірювальною і керувальною апаратурою, збору, обробки і овідображення інформації і результатів розрахунків, а також моделювання як окремих об’єктів, так і автоматизованих систем в цілому [2].
2. Цілі и задачі, заплановані практичні результати
З урахуванням переваг математичного моделювання за допомогою пакету LabVІEW була поставлена задача створення віртуальної лабораторії з дослідження типових систем електропривода, що дозволяє проводити всебічне дослідження питань теорії електропривода і систем керування електроприводами, що є доцільним з методичної точки зору. [3].
-
Цілі и задачі роботи зводяться до наступних:
- • Створення віртуальних моделей найпростіших пристроїв;
- • Розробка концепції створення віртуальної моделі стендів з дослідження систем електроприводу;
- • Вивчення засобів моделювання систем програмного пакета LabVIEW;
- • Дослідження робочих і аварійних режимів роботи систем електроприводу за допомогою віртуальних стендів.
-
Запланованими практичними результатами є віртуальні стенди з дослідження наступних систем електроприводу:
- • Система підпорядкованого регулювання швидкості електроприводу постійного струму;
- • Система векторного керування швидкістю асинхронного двигуна;
- • Система векторного керування швидкістю синхронного двигуна з постійними магнітами.
3. Власні результати
При розробці віртуальних стендів був застосований досвід моделювання систем електропривода за допомогою програми Simulink, який був перенесений у LabVIEW з урахуванням особливостей цього пакету та зокрема його бібліотеки Control Design & Simulation. Основні особливості розробки віртуальних лабораторних стендів полягають у збереженні функціональних властивостей конкретного лабораторного обладнання, яке застосовується у лабораторіях, стосовно до усіх елементів керування і захисту, що входять до стенда. Це дозволяє застосовувати віртуальні стенди, по-перше, для попереднього вивчення студентами влаштування і послідовності роботи з обладнанням перед переходом до практичної частини на реальному обладнанні, по-друге, як методичний інструмент при дистанційному навчанні. [3].
3.1. Віртуальний стенд з дослідження двоконтурної системи підпорядкованого регулювання швидкості електроприводу постійного струму
Структурна схема електроприводу, що досліджується приведена на рис. 1. Регулятори струму і швидкості налаштовуються в стенді, тому вигляд їх передавальних функцій WРШ(p) и WРС(p) на структурній схемі не показано. Так само не показано вигляд передавальних функцій зворотних зв’язків зі струму WС(p) і швидкості WШ(p). Завдання на вхід системи регулювання швидкості може бути подано стрибком або через задатчик інтенсивності.

Рисунок 1 — Структурна схема електроприводу, що досліджується
-
До складу стенда входять:
- Приладова панель (ПП).
- Набірне поле (НП).
- Машина, що досліджується М1 и навантажувальна машина М2.
- Реверсивний тиристорний перетворювач типу БТУ-3601, встановлений у шафі типу «Кедр-84» і реверсивний тиристорний перетворювая типу ЭТ6, встановлений поряд зі стендом.
- Модуль живлення системи керування.
- Чарунки датчиків и операційних підсилювачів.
- Комутаційна апаратура.
Зовнішній вигляд стенда приведений на рис. 2. В якості елементної бази для побудови системи керування прийняті датчики струму типу ЯФУ-0145, стабілізатор напруги ЯФУ-0153, що використовуються в перетворювачах КТЕУ. У лабораторії розроблена типова чарунка операційних підсилювачів, на якій розташовані три підсилювача типу К140УД6. Відповідні входи і виходи цих операційних підсилювачів виведені на набірне поле.
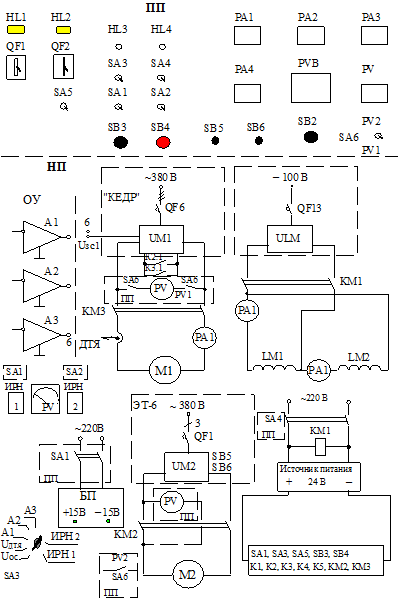
Рисунок 2 — Зовнішній вигляд лабораторного стенда
На приладній панелі (ПП) розташована комутаційна апаратура — автоматичні вимикачі QF1, QF2, тумблери SA1…SA6, кнопки SB3…SB6, прибори, що реєструють PA1…PA4, PV, PVB. Кнопка SB2 застосовується для розширення шкали таховольтметра PVB.
Для керування системою регулювання і реализації потрібних передавальних функцій розроблено набірне поле. На набірному полі (НП) розташовані виводи трьох операційних підсилювачів А1...А3, по два резистори на їх входах, резистори, конденсатори и стабілітрони в каналах зворотних зв’язків підсилювачів; вихід датчика струму якоря машини, що досліджується Uдся; виводи задатчика інтенсивності ЗІ; потенціометри джерел напруг, що регулюються ДРН1 и ДРН2, що підключаються тумблерами SA1, SA2; вихід дільника напруги, що підключається на вихід тахогенератора; галетний перемикач SA3, за допомогою якого вольтметр PV набірного поля підключається до контрольних точок набірного поля. Необхідна структурна схема керування комутується за допомогою скоб і, у випадку необхідності, — провідниками. На наборному полі показано спрощена схема силової частини електроприводу и релейно-контакторна схема керування — РКСК. За допомогою набірного поля здійснюється: перевірка роботи елементів схеми керування, набір необхіної структурної схеми керування електроприводом, зняття сигналів для осцилографування в характерних точках схеми, подачі напруги завдання на вхід системи керування електроприводом і реверса цього завдання.
В установці передбачений захист від обриву поля двигуна — машина, що досліджується і навантажувальна машина підключаються до тиристорних перетворювачів тільки при справному ланцюгу збудження машин. Захист здійснюється за допомогою реле обриву поля КА1, що дозволяє роботу контакторів, що підключають машини до перетворювачів [4].
Зовнішній вигляд передньої панелі віртуального стенда, розробленого у середовищі пакета LabVIEW, представлений на рис. 3 (на віртуальних осцилографах і приладах стенда відображені значення і графіки, отримані в результаті виконання одного сеансу моделювання штатного режиму роботи). Віртуальний стенд зберегає функціональність основних елементів реального стенда, і надає широкі можливості дослідження штатних і аварійних режимів роботи системи, таких як послідовне настроювання контурів системи, оцінювання статичних и динамічних властивостей електроприводу при різних параметрах регуляторів, обрив сигналів зворотних зв’язків, інших каналів передачі впливів та ін.. [5].
Рисунок 3 — Зовнішній вигляд передньої панелі віртуального стенда.
Анімація: 7 кадрів, 7 циклів повторення, 140 КБ
3.2. Віртуальний стенд для дослідження системи векторного керування асинхронним двигуном
Функціональна схема системи векторного керування з непрямою орієнтацією по вектору потокозчеплення ротора представлена на рис. 4. Принцип керування полягає в формуванні діаграми змінювання фазних напруг АД за допомогою АІН з ШІМ в функції напруг керування Uкd и Uкq, що задаються в ортогональній системі координат d, q, орієнтованій по вектору потокозчеплення ротора ΨR. Для послідовного перетворювання напруг керування до трифазної системи координат використовують перетворювач координат ПК1 (d, q → α, β) і перетворювач фаз ПФ (α, β → A, B, C).
Рисунок 4 — Функціональна схема системи векторного керування АД
Частина СКЕП, що регулюється будується в ортогональній системі координат d, q як двоканальна система з двоконтурними підсистемами стабілізації швидкості (з регуляторами швидкості РШ і струму PTq) і потокозчеплення ротора АД (з регуляторами потокозчеплення РПт і струму РТd). Блок подіду БП на виході РШ компенсує використання операції перемноження при формуванні моменту АД. Обмеження вихідних сигналів регуляторів зовнішніх контурів здійснюється на рівнях UЗ.ISd и UЗ.ISq, що відповідають максимально допустимим значенням складових ISd и ISq струму статора. Для отримання сигналів зворотних зв’язків в силовій частині електроприводу передбачаються датчики струмів (ДС1, ДС2) і напруг (ДН1, ДН2), а також датчик швидкості ДШ (електромашинний або цифровий), що встановлюється на валу АД або механізму.
Перетворення сигналів, пропорційних струмам (U0.ISA, U0.ISC) и напругам (UUSAB, UUSAC) трифазної системи до нерухомої ортогональної системи координат α, β здійснюється за допомогою обчислювачів ортогональних струмів (ВОС) і напруг (ВОН). Сигнали U0.ISα і U0.ISβ, пропорційні ортогональним струмам ISα і ISβ, піддаються координатним перетворенням в ПК2 (α, β → d, q), і беруть участь в організації зворотних зв’язків по складовим ISd и ISq струму статора. Вихідні сигнали ВОС і ВОН також зазвичай приймають участь в формуванні значення вектора потокозчеплення ротора, що спостерігається (обчислюється).
Блок компенсації БК, з урахуванням наявності паралельних зворотних зв’язків по ортогональним складовим струму статора, потокозчепленню і швидкості, призначений для компенсації впливу внутрішніх перехресних зворотних зв’язків АД по принципу, аналогічному тому, що використовується в електроприводах постійного струму для компенсації впливу проти-ЕДС. В якості пристроїв, що задаються, використовують задатчик інтенсивності (ЗІ), що формує завдання UЗ.с на контур швидкості, і задатчик послаблення поля (ЗПП), що формує залежний від сигналу UЗ.с сигнал завдання UЗ.п на модуль вектору потокозчеплення ротора (або, при відсутності контуру регулювання потокозчеплення, сигнал UЗ.ISd завдання на складову струму статора, що створює потік).
Синтез передавальних функцій регуляторів здійснюють на основі спрощеної структурної схеми (рис. 5), отриманої в передбаченні про відсутність взаємного впливу ЕДС обертання і проти-ЕДС двигуна на динамічні властивості контурів регулювання струму. Регулятори струму (ПІ-типу) становляться ідентичними, і їх налаштовують з умови забезпечення допустимої швидкодії. Регулятор швидкості налаштовують на модульний (П-регулятор) або симетричний (ПІ-регулятор) оптимум, регулятор потокозчеплення (при його наявності) синтезують ПІ-типу. Для реализації асинхронного електроприводу, що частотно регулюється з векторним керуванням принципово можливо використання будь-якого з відомих типів перетворювачів частоти. Однак найбільш універсальним є електропривод на основі перетворювача частоти з автономним інвертором напруги (АІН).

Рисунок 5 — Структурна схема системи векторного керування з орієнтацією по вектору потокозчеплення ротора АД
-
Загальний вигляд лабораторного стенда представлений на рис. 6. До складу стенда входять:
- Приладова панель.
- Асинхронний двигун з короткозамкненим ротором.
- Електропривод на базі інвертора напруги з широтно-імпульсною модуляцією.
- Комутаційна апаратура.
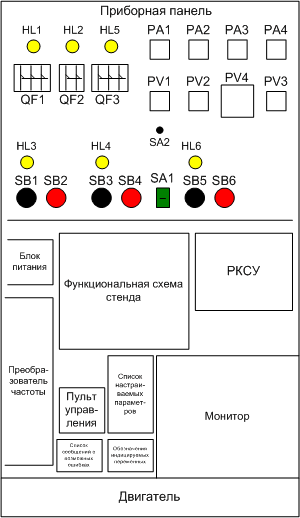
Рисунок 6 — Загальний вигляд лабораторного стенда
-
Електропривод має наступні функціональні блоки:
- Силова частина, яка містить вхідний фільтр, выпрямляч, ланку постійного струму з клампером для скидання енергії, що отримується від двигуна при його роботі в генераторних режимах, інвертор, а також датчики вихідних струмів інвертора і напруги ланки постійного струму.
- Керуючий контролер, до задач якого відноситься отримання завдання на обробку швидкості/моменту, розрахунок алгоритму векторного керування АД, розрахунок векторної ШІМ, видавання імпульсів керування ключами інвертора, а також керування ключом клампера, опитування сигналів зворотних зв’язків по струму і швидкості, реализація всіх захисних функцій, а також загальне керування всією системою.
- Схеми узгодження сигналів між керуючою і силовою частинами, які, окрім узгодження рівнів сигналів, повинні забезпечувати гальванічну розв’язку силових і керуючих ланцюгів, що надає більш високий захист від перешкод системі керування, а також запобігає виходу з ладу системи керування при аварійних ситуаціях в силовій частині.
- Датчик мережі, основне призначення якого — нагляд за живильною мережею з метою завчасного виявлення потенційно небезпечних режимів роботи живильної мережі, що призводять до аварії силової частини електроприводу. До таких режимів, зокрема, відносяться перевищення напруги мережі допустимого рівня, перекіс фаз, зникнення однієї з фаз, короткочасне зникнення напруги, та ін..
- Інтерфейс користувача, до якого відносяться: сигнали дискретного і аналогового вводу/виводу, пульт керування, забезпечуючий ввод параметрів в систему, вивід інформації про стан системи, значеннях змінних, а також сигнализацію про помилки, збої або аварійні ситуації в системі.
- Джерело живлення асинхронного електроприводу, до якого пред’являються високі вимоги в частині стійкості роботи при порушенні режимів роботи живильної мережі.
В якості датчика швидкості в лабораторній установці використовується імпульсний датчик, виконаний в сполученні з пристроєм розпізнавання напрямку обертання. Перетворювач частоти виконаний по традиційній схемі ПЧ з трьома ланками з транзисторним інвертором з ШІМ [6].
Даний реальний стенд на даному етапі має обмежені можливості (в частині навантаження двигуна, що досліджується, дослідження аварійних режимів, можливостей програми, що забезпечує візуалізацію перехідніх процесів, та ін.). Тому віртуальний стенд розроблялся з метою збереження ідентичності процесів в штатних режимах, розширення можливостей віртуального стенда в галузях дослідження аварійних режимів, варіантів віртуального навантаження двигуна, розширення можливості візуализації процесів та ін..
Зовнішній вигляд передньої панелі віртуального стенда, розробленого в середовищі пакета LabVIEW, представлений на рис.7 (на віртуальних осцилографах і приладах стенда відображені значення і графіки, отримані в результаті виконання моделювання довільного штатного режиму роботи).
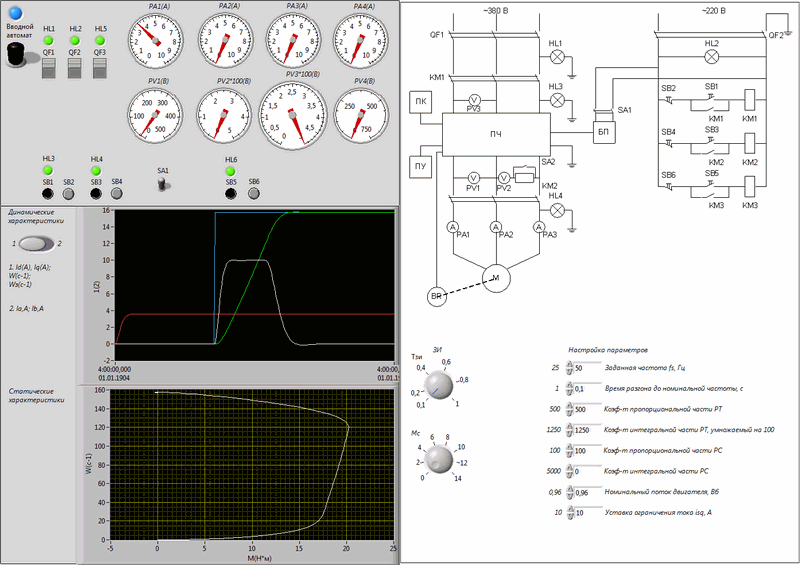
Рисунок 7 — Зовнішній вигляд передньої панелі віртуального стенда
Віртуальний стенд має властивості, які було заплановано забезпечити на етапі ставлення цілі його розробки, зберігає функціональність основних елементів реального стенда. В зрівнянні з реальним стендом дає значно більш широкі можливості дослідження штатних і аварійних режимів роботи системи електроприводу. До типових задач належать послідовне налаштування контурів системи регулювання, візуалізація будь-яких координат електроприводу з векторним керуванням, оцінювання статичних і динамічних процесів в штатних і аварійних режимах та ін.. Це дозволяє використовувати його для відпрацьовування методики роботи з реальним обладнанням, а також для дослідних цілей [7].
4. Виводи
-
На даному етапі розроблені два наступних віртуальних стенда в середовищі LabVIEW:
- • Віртуальний стенд з дослідження двоконтурної системи підпорядкованого регулювання швидкості електроприводу постійного струму;
- • Віртуальний стенд для дослідження системи векторного керування асинхронним двигуном.
Як і було заплановано, отримані віртуальні стенди зберігають функціональність реальних лабораторних установок, но більш технологічні в плані дослідження широкої гамми режимів роботи систем електроприводу. Важливо відмітити, що в данний час дані віртуальні стенди знаходяться в стадії безперервного удосконалення.
5. Список використаної літератури
- Евдокимов Ю.К., Кирсанов А.Ю. Организация типовой дистанционной автоматизированной лаборатории с использованием LabVIEW-технологий в техническом вузе. Сборник трудов Международной научно-практической конференции «Образовательные, научные и инженерные приложения в среде LabVIEW и технологии National Instruments». Москва, Россия. 14-15 ноября, 2003. — 15-17 c.
- Н.А.Виноградова, Я.И.Листратов, Е.В.Свиридов. Разработка прикладного программного обеспечения в среде LabVIEW: Учебное пособие — М.: Издательство МЭИ, 2005. — 49 с.
- Є.Ю. Голубцова, М.В. Гамаєва, Г.С. Чекавський. Застосування програмного пакету LabVIEW для дослідження систем електропривода. Електротехнічні та електромеханічні системи: Матеріали XVI Всеукраїнської студен. наук.-техн. конф., м. Севастополь, 18-20 квітня 2011 / М-во освіти і науки, молоді та спорту України, Севастоп. нац. тех. ун-т; наук. ред. О.М. Дегтярьов — Севастополь: СевНТУ, 2011. — 176 с., с. 41-42
- Исследование двухконтурной системы подчиненного регулирования. Инструкция к лабораторной работе по курсу «Системы управления электроприводами» (для студентов специальности «Электромеханические системы автоматизации и электропривод»). — Донецк: ДонГТУ, 1997. — 13 с.
- Голубцова Е. Ю., Чекавский Г. С.. Виртуальный стенд по исследованию двухконтурной системы подчинённого регулирования скорости электропривода постоянного тока в среде LabVIEW. Вісник кафедри «Електротехніка» за підсумками наукової діяльності студентів. — Донецьк, ДонНТУ, 2011 — 181 с., с. 25-26
- Исследование характеристик асинхронного двигателя при векторном управлении с косвенной ориентацией по вектору потокосцепления ротора. Инструкция к лабораторной работе по курсу «Системы векторного управления» (для студентов специальности «Электромеханические системы автоматизации и электропривод») / Cост.: Чекавский Г.С.. — Донецк: ДонНТУ, 2008. — 20 с.
- Голубцова Е. Ю., Чекавский Г. С.. Виртуальный стенд для исследования системы векторного управления асинхронным двигателем. Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць ХІ науково-технічної конференції аспірантів та студентів в м. Донецьку 17-20 травня 2011 р. — Донецьк, ДонНТУ, 2011. — 306 с., с. 251-253