 |
|
|
|
 |
|
 |
|
|||||||||||
|
|
|
|||||||||||||||||
 |
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
Медведєв Кирило Володимирович
Факультет комп'ютерних наук і технологій
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
||||||||||||||||||


Початок рядка |
Ідентифікатор адреси рядка |
Пусте поле або поле даних
|
...
|
Пусте поле або поле даних
|
Необов'язкове поле контрольної суми
|
Кінець рядка
|
"$" HEX 24 |
'address field' |
[","+'data field']
|
...
|
[","+'data field']
|
["*"+
'checksum field'
]
|
'CR''LF' Hex 0D 0A
|
Використовуваний GPS-модуль EM401 видає в безперервному стані чотири основні вихідні NMEA команди: GGA, GSA, GSV і RMC, в яких містяться ключові дані про місцезнаходження, час, якість даних; відображається режим роботи GPS-приймача; визначається кількість використаних і видимих супутніків, їх номери та параметри, що використовуються при вирішенні навігаційних завдань.
Приклади повідомлень:
- $GPGGA, 161229.487,3723.2475,N, 12158.3416,W, 1,07,1.0,9.0,M, ,M,0000*18
- $GPGSA, A,3,07,02,26,27,09,04,15,,,,,,1.8,1.0,1.5*33
- $GPGSV, 2,1,07,07,79,048,42,02,51,062,43,26,36,256,42,27,27,138,42*71
- $GPRMC, 161229.487,A,3723.2475,N,12158.3416,W,0.13,309.62,120598,,*10 [7]
Підсумувавши , алгоритм можна розбити на 2 основних етапи:
- Вилов, читання і прийом NMEA-команд з обраного СОМ-порту.
- Розбивка NMEA-команд і вибір необхідних даних.
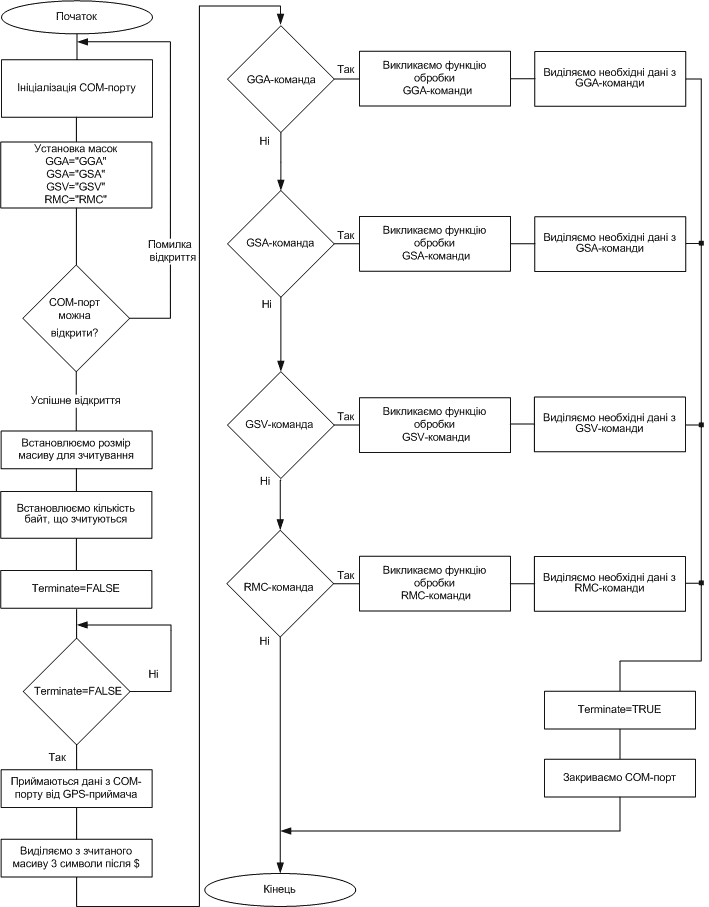
Рисунок 3 - Схема алгоритму обробки даних GPS-модуля
Побудова інтерфейсної схеми узгодження GPS-приймача GlobalSat EM401 з мікроконтролером MICROBLAZE
Для синхронізації роботи всіх модулів, і програмного управління використовується софтверний мікроконтроллер MICROBLAZE. Мікроконтролер реалізовано програмно на базі FPGA.
Основним способом обміну інформацією між модулями охоронного комплексу є передача через СОМ-порт. Складність полягає в тому, що прийом-передача через нього вимагають суворого дотримання інтерфейсу RS-232, згідно з яким високий рівень сигналу відповідає напрузі +3 .. +15 В, а нижній -3 ..- 15 В. У свою чергу, GPS модуль використовує знижене живлення - 3.3 В., при цьому передача даних здійснюється на низьковольтних рівнях - Low Voltage TTL, рівні сигналу яких не перевищують + -1,5 В. У зв'язку з цим для узгодженості можна використовувати мікросхеми MAX232 або MAX3232, які погоджують рівні напруги до 5 В і 3.3 В відповідно [1].
У даному проекті використання СОМ-порту більш переважно, ніж USB. Це обумовлено, перш за все, тим, що на платі 3E Development KIT є два СОМ-порта для сполучення з іншими пристроями. Другим безсумнівним плюсом є те, що NMEA-протокол, що використовується GPS-приймачем GlobalSat EM401 для передачі даних, сумісний з RS-232.
Основною деталлю інтерфейсної схеми узгодження GPS-приймача GlobalSat EM401 з мікроконтролером MICROBLAZE є мікросхема MAXIM 3232. Це часто вживаний перетворювач рівнів сигналів ТТЛ-КМОП з діапазоном живлячої напруги 3 .. 5,5 В. Вона оснащена фірмовими вихідними каскадами передавачів, що забезпечують мале падіння напруги і повну сумісність з вимогами стандарту RS-232 при напрузі живлення від 3,0 до 5,5 В. Формування вихідного сигналу, при використанні одного позитивного живлення напруги, забезпечується двома вбудованими генераторами накачування, для роботи яких достатньо чотирьох зовнішніх малогабаритних конденсаторів ємністю по 0,1 мкФ. Для MAX3232 гарантується, при забезпеченні вихідних рівнів RS-232, продуктивність до 120 Кбіт / с. Мікросхема містить два приймача і два передавачі [12].
Основні характеристики мікросхеми MAX3232:
- мале споживання: 300 мкА;
- повну відповідність специфікаціям EIA/TIA-232 до напруги живлення 3В;
- гарантована швидкість наростання сигналу:6 В/мкс;
- типовий струм ICC: 0,3 мA;
- особливість: повна сумісність з RS-232.
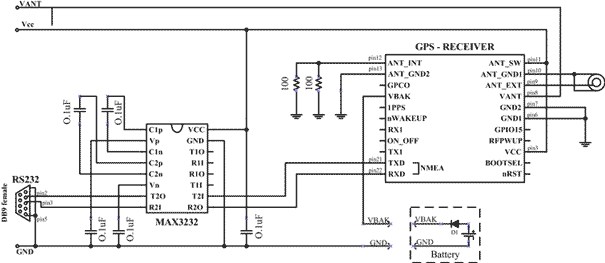
Рисунок 4 - Принципова схема підключення GPS-модуля до COM-порту
Другим важливим елементом інтерфейсної схеми узгодження є пятівольтовий лінійний стабілізатор напруги LM7805 (вітчизняний аналог - КР142ЕН5А) [13].
Після впаювання всіх елементів у макетну плату була отримана інтерфейсна схеми узгодження GPS-приймача GlobalSat EM401 з мікроконтролером MICROBLAZE, показана на рисунку 5.

Рисунок 5 - Інтерфейсна схема узгодження
Висновок
У ході виконання магістерської роботи була досліджена задача розробки структури навігаційної системи на базі FPGA-технологій, яка передбачає виконання різними пристроями функцій оповіщення місцезнаходження об'єкта.
Робота з апаратурою - дуже складний і трудомісткий процес, що вимагає великих моральних і матеріальних витрат, тому процес налагодження проекту з використанням налагоджувальної плати ще триває.
У найближчій перспективі буде розроблена програма обробки даних з GPS-приймача в мікроконтроллер. На даному етапі ведеться робота зі створення алгоритму і програми узгодження GPS-модуля з FPGA.
Література
1. Грудінін А.А., Похомов А.А., Медведєв К.В., Зінченко О.Ю., Медгаус А.І., Зінченко Ю.Є.; доповідь "Система сигналізації автомобіля на базі GSM/GPS/FPGA технологій "; Інформатика та комп'ютерні Технології - 2010 // Збірка матеріалів шостої міжнародної науково-технічної Конференції студентів, аспірантів та молодих науковців - Донецьк, ДонНТУ - 2010.
2. Керівництво користувача по GPS-приймачу GlobalSat EM-401. // Інтернет-ресурс
http://www.sparkfun.com/datasheets/GPS/EM-401%20User%20Manual.pdf
3. Геймур І.; "Нові сімейства GSM/GPRS/EDGE/GPS модулів компанії Siemens, орієнтовані на автомобільне застосування"; журнал "Бездротові технології" № 2, 2008р. // Інтернет-ресурс
http://www.wireless-e.ru/articles/modules/2008_2_14.php
4. Dempster A.G., Parkinson K.J., Engel F., Mumford P., Rizos С.; The UNSW/NICTA FPGA-based GPS Receiver: A Tool for GNSS Research; розробник електроніки компанія General Dynamics // Інтернет-ресурс
http://www.dynamics.co.nz/media/V1/indicon2005.pdf
5. Стаття в Wikipedia про RS-232 // Інтернет-ресурс
http://en.wikipedia.org/wiki/RS-232
6. Протокол NMEA і команди управління GPS-приймачами GlobalSat // Інтернет-ресурс
http://fort21.ru/download/protocol_nmea.pdf
7. Довідкове керівництво по NMEA-командам для SiRF-пристроїв // Інтернет-ресурс
http://www.sparkfun.com/datasheets/GPS/NMEA%20Reference%20Manual-Rev2.1-Dec07.pdf
8. Семенов Ю.А.; Бездротові (радіо) канали та мережі // Інтернет-ресурс
http://web.opennet.ru/docs/RUS/inet_book/3/radio_33.html
9. Сайт, присвячений шаблонами з векторної графіки // Інтернет-ресурс
http://www.grafikerler.net/telefon-vektorleri-t51406.html
10. Darius; "Cheap and used Sirf II e LP GPS Module"; блог, присвячений різним проектам в галузі електроніки, проектування, програмного забезпечення. // Інтернет-ресурс
http://www.electronicsblog.net/cheap-and-used-sirf-ii-e-lp-gps-module-from-ebay/
11. Детальний опис архітектури чіпсета SiRFstarII. // Інтернет-ресурс
http://www.hotchips.org/archives/hc11/3_Tue/hc99.s7.3.Turetzky.pdf
12. Документація по мікросхемі MAX3232 // Інтернет-ресурс
http://datasheets.maxim-ic.com/en/ds/MAX3222-MAX3241.pdf
13. Документація по мікросхемі LM7805 // Інтернет-ресурс
http://www.avrlab.com/node/29
14. Опис роботи програми GPSDiag для моніторингу вхідних NMEA GPS-повідомлень з послідовного порту; офіційний сайт розробника // Інтернет-ресурс
http://commlinx.com.au/
15. Опис , принципові схеми, документація охоронних GSM-систем на базі GSM-мереж (для стаціонарного та мобільного розміщення). // Інтернет-ресурс
http://www.wrjob.org.ru/guard.html#
Важливе зауваження
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: листопад 2011 р. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його наукового керівника після зазначеної дати.