 |
|
|
|
 |
|
 |
|
|||||||||||
|
|
|
|||||||||||||||||
 |
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
Медведев Кирилл Владимирович
Факультет компьютерных наук и технологий
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
||||||||||||||||||


Начало строки |
Идентификатор адреса строки |
Пустое поле или поле данных
|
...
|
Пустое поле или поле данных
|
Необязательное поле контрольной суммы
|
Конец строки
|
"$" HEX 24 |
'address field' |
[","+
'data field'
]
|
...
|
[","+
'data field'
]
|
["*"+
'checksum field'
]
|
'CR''LF' Hex 0D 0A
|
Используемый GPS–модуль EM401 выдает в непрерывном состоянии четыре основные выходные NMEA команды: GGA, GSA, GSV и RMC, в которых содержатся ключевые данные о местоположении, времени, качестве данных; отображается режим работы GPS–приемника; определяется количество использованных и видимых спутников, их номера и параметры, используемые при решении навигационных задач.
Примеры сообщений:
- $GPGGA, 161229.487,3723.2475,N, 12158.3416,W, 1,07,1.0,9.0,M, ,M,0000*18
- $GPGSA, A,3,07,02,26,27,09,04,15,,,,,,1.8,1.0,1.5*33
- $GPGSV, 2,1,07,07,79,048,42,02,51,062,43,26,36,256,42,27,27,138,42*71
- $GPRMC, 161229.487,A,3723.2475,N,12158.3416,W,0.13,309.62,120598,,*10 [7]
Подытожив, алгоритм можно разбить на 2 основных этапа:
- Вылов, чтение и прием NMEA-команд из выбранного СОМ-порта.
- Разбивка NMEA-команд и выбор необходимых данных.

Рисунок 3 - Схема алгоритма обработки данных GPS-модуля
Построение интерфейсной схемы согласования GPS-приемника GlobalSat EM401 с микроконтроллером MICROBLAZE
Для синхронизации работы всех модулей, и программного управления используется софтверный микроконтроллер MICROBLAZE. Микроконтроллер реализован программно на базе FPGA.
Основным способом обмена информацией между модулями охранного комплекса является передача через СОМ-порт. Сложность заключается в том, что прием-передача через него требуют строгого соблюдения интерфейса RS-232, согласно которому высокий уровень сигнала соответствует напряжению +3..+15 В, а нижний -3..-15 В. В свою очередь, GPS модуль использует пониженное питание – 3.3 В., при этом передача данных осуществляется на низковольтных уровнях – Low Voltage TTL, уровни сигнала которых не превышают +-1,5 В. В связи с этим для согласованности можно использовать микросхемы MAX232 или MAX3232, которые согласовывают уровни напряжения до 5 В и 3.3 В соответственно [1].
В данном проекте использование СОМ-порта более предпочтительно, чем USB. Это обусловлено, прежде всего, тем, что на плате 3E Development KIT есть два СОМ-порта для сопряжения с другими устройствами. Вторым несомненным плюсом является то, что NMEA-протокол, использующийся GPS-приемником GlobalSat EM401 для передачи данных, совместим с RS-232.
Основной деталью интерфейсной схемы согласования GPS-приемника GlobalSat EM401 с микроконтроллером MICROBLAZE является микросхема MAXIM 3232. Это часто применяемый преобразователь уровней сигналов ТТЛ-КМОП с диапазоном питающих напряжений 3..5,5В. Она оснащена фирменными выходными каскадами передатчиков, обеспечивающими малое падение напряжения и полную совместимость с требованиями стандарта RS-232 при напряжении питания от 3,0 до 5,5 В. Формирование выходного сигнала, при использовании одного положительного напряжения питания, обеспечивается двумя встроенными генераторами накачки, для работы которых достаточно четырех внешних малогабаритных конденсаторов емкостью по 0,1 мкФ. Для MAX3232 гарантируется, при обеспечении выходных уровней RS-232, производительность до 120 Кбит/с. Микросхема содержит два приемника и два передатчика [12].
Основные характеристики микросхемы MAX3232:
- малое потребление: 300 мкА;
- полное соответствие спецификациям EIA/TIA-232 до напряжения питания 3В;
- гарантированная скорость нарастания сигнала: 6 В/мкс;
- типовой ток ICC: 0,3 мA;
- особенность: полная совместимость с RS-232.
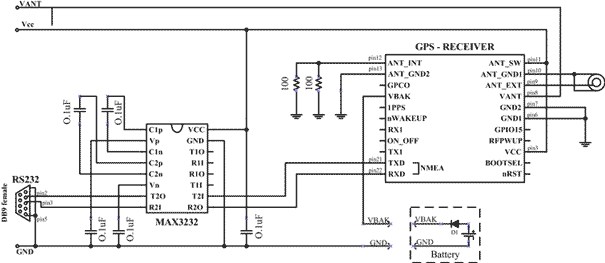
Рисунок 4 - Принципиальная схема подключения GPS-модуля к COM-порту
Вторым немаловажным элементом интерфейсной схемы согласования является пятивольтовый линейный стабилизатор напряжения LM7805 (отечественный аналог - КР142ЕН5) [13].
После впаивания всех элементов в макетную плату была получена интерфейсная схемы согласования GPS-приемника GlobalSat EM401 с микроконтроллером MICROBLAZE, показанная на рисунке 5.

Рисунок 5 - Интерфейсная схема согласования
Заключение
В ходе выполнения магистерской работы была исследована задача разработки структуры навигационной системы на базе FPGA-технологий, которая предполагает выполнение различными устройствами функций оповещения местонахождения объекта.
Работа с аппаратурой - очень сложный и трудоемкий процесс, требующий больших моральных и материальных затрат, поэтому процесс отладки проекта с использованием отладочной платы еще продолжается.
В ближайшей перспективе будет разработана программа обработки данных с GPS-приемника в микроконтроллер. На данном этапе ведется работа по созданию алгоритма и программы согласования GPS-модуля с FPGA.
Литература
1. Грудинин А.А., Похомов А.А., Медведев К.В., Зинченко Е.Ю., Медгаус А.И., Зинченко Ю.Е.; доклад “Система сигнализации автомобиля на базе GSM/GPS/FPGA технологий”; Інформатика та комп'ютерні технології — 2010 // Збірка матеріалів шостої міжнародної науково-технічної конференції студентів, аспірантів та молодих науковців — Донецьк, ДонНТУ — 2010.
2. Руководство пользователя по GPS-приемнику GlobalSat EM-401. // Интернет-ресурс
http://www.sparkfun.com/datasheets/GPS/EM-401%20User%20Manual.pdf
3.Геймур И.; “Новые семейства GSM/GPRS/EDGE/GPS модулей компании Siemens, ориентированные на автомобильное применение”; журнал "Беспроводные технологии" №2, 2008г. // Интернет-ресурс
http://www.wireless-e.ru/articles/modules/2008_2_14.php
4.Dempster A.G., Parkinson K.J., Engel F., Mumford P., Rizos С.; The UNSW/NICTA FPGA-based GPS Receiver: A Tool for GNSS Research; разработчик электроники компания General Dynamics // Интернет-ресурс
http://www.dynamics.co.nz/media/V1/indicon2005.pdf
5. Статья в Wikipedia о RS-232 // Интернет-ресурс
http://en.wikipedia.org/wiki/RS-232
6. Протокол NMEA и команды управления GPS-приемниками GlobalSat // Интернет-ресурс
http://fort21.ru/download/protocol_nmea.pdf
7. Cправочное руководство по NMEA-командам для SiRF-устройств// Интернет-ресурс
http://www.sparkfun.com/datasheets/GPS/NMEA%20Reference%20Manual-Rev2.1-Dec07.pdf
8. Семенов Ю.А.; Беспроводные (радио) каналы и сети // Интернет-ресурс
http://web.opennet.ru/docs/RUS/inet_book/3/radio_33.html
9. Сайт, посвященный шаблонам по векторной графике // Интернет-ресурс
http://www.grafikerler.net/telefon-vektorleri-t51406.html
10. Darius; "Cheap and used Sirf II e LP GPS Module"; блог, посвященный различным проектам в области электроники, проектирования, программного обеспечения.
http://www.electronicsblog.net/cheap-and-used-sirf-ii-e-lp-gps-module-from-ebay/
11. Подробное описание архитектуры чипсета SiRFstarII. // Интернет-ресурс
http://www.hotchips.org/archives/hc11/3_Tue/hc99.s7.3.Turetzky.pdf
12. Документация по микросхеме MAX3232 // Интернет-ресурс
http://datasheets.maxim-ic.com/en/ds/MAX3222-MAX3241.pdf
13. Документация по микросхеме LM7805 // Интернет-ресурс
http://www.avrlab.com/node/29
14. Описание работы программы GPSDiag для мониторинга входящих NMEA GPS-сообщений из последовательного порта; официальный сайт разработчика // Интернет-ресурс
http://commlinx.com.au/
15. Описание, принципиальные схемы, документация охранных GSM-систем на базе GSM-сетей (для стационарного и мобильного размещения). // Интернет-ресурс
http://www.wrjob.org.ru/guard.html#
Важное замечание
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: ноябрь 2011 г. Полный текст работы и материалы по теме могут быть получены у автора или его научного руководителя после указанной даты.