
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, заплановані результати
- 3. Огляд досліджень і розробок
- 4. Основні етапи в розпізнаванні номерного знака транспортного засобу
- Висновки
- Перелік посилань
Вступ
Повсюдне впровадження інформаційних технологій в усі сфери сучасного життя створює вимогу вважати систему обробки зображень з камер відеоспостереження з подальшим розпізнаванням будь-яких його частин, наприклад, номерного знаку автомобіля, невід’ємним ресурсом інформаційної системи. Тому що окремо взята інформаційна система, без будь-яких даних не має значення, вона так само повинна вміти трансформувати інформацію про зображення, що містить необхідні дані, з реального світу в інформаційну систему [1]. Слід врахувати, що відеокамери працюють за принципом онлайн передачі всього реєстрованого потоку нестиснутих даних від камери в кільцевий буфер оперативної пам’яті комп’ютера. Також реєструють потоки нестиснутих даних і передають їх до цільового пристрою на жорсткий диск або оперативну пам’ять. Таким чином, в комп’ютер надходить дуже великий потік даних, який потрібно швидко обробити і записати [2]. Всі ці процедури вимагають часу. Необхідно всі ці операції оптимізувати для збільшення ефективності системи.
Система, яка зможе розпізнавати номерний знак як за допомогою людини-оператора, так і за допомогою комп’ютерного обладнання, яке буде ідентифікувати транспортні засоби за їх номерним знакам (державним реєстраційним знакам) і потім поміщати ці дані в інформаційну систему.
Виходячи з цього, можуть застосовуватися різні методи розпізнавання номерних знаків транспортного засобу, в різних сферах життя. Автоматичне розпізнавання номерів широко застосовується на підприємствах, які обмежують проїзд на свою територію. У багатьох країнах систему розпізнавання автомобільних номерів використовуються для контролю автомобільного руху. Пересування кожного транспортного засобу реєструється в центральній базі даних і дозволяє легко знаходити викрадені машини, а в годину-пік допомагає регулювати рух на завантажених міських магістралях.
1. Актуальність теми
Актуальність розробки системи розпізнавання автомобільних номерних знаків полягає в тому, що останнім часом зросла інтенсивність автоматизації контролю транспортних засобів на пропускних пунктах, так само це потрібно для визначення автомобіля порушника руху і за контролем трафіку на дорозі. Система, яка розроблюється, автоматично розпізнає номерний знак автомобіля, записує його в базу даних або перевіряє з вже внесеними даними в базі, дозволяючи провести автоматичний пропуск на територію. Такий контроль буде сприяти збільшенню ефективності пропускного пункту, так як він не залежатиме від людського фактора.
Дана задача відноситься до проблеми створення ефективних алгоритмів і програмних засобів розпізнавання графічних образів в реальному часі. Розробка системи, яка має ті ж функції, однак має більш вигідним економічним рішенням у предметі впровадження, обробки і продуктивності - актуальна науково-технічна задача.
2. Мета і задачі дослідження, заплановані результати
Розпізнавання номерного знака транспортного засобу включає наступні етапи: визначення положення номерного знака, його сегментацію, вилучення окремих символів знака та їх нормалізація, розпізнавання символів і підсумковий синтаксичний аналіз номерного знака.
Метою роботи є дослідження та розробка методів і алгоритмів розпізнавання символів, цифр і букв російського/українського алфавіту, які забезпечують аналіз та обробку інформації з камер відеоспостереження для подальшого виявлення, визначення положення та ідентифікації номерного знака транспортних засобів. Досягнення поставленої мети визначило необхідність вирішення наступних завдань:
-
Аналіз способів локалізації номерного знака, сегментації.
Розробка структури і функцій системи для обробки символів номерного знака.
Розробка і дослідження алгоритмів розпізнавання символів.
Вибір методу розпізнавання та оцінка його ефективності.
Аналіз обладнання для отримання коректних даних з камер відеоспостереження.
Розробка системи і прикладного програмного забезпечення для обробки зображення з камер відеоспостереження для розпізнавання номерного знака транспортного засобу.
Після завершення роботи планується отримати працездатну комп’ютерну інформаційну керуючу систему, призначену для впровадження в систему контролю пропускних пунктів на територію.
3. Огляд досліджень і розробок
В мире уже существуют разработки, касающиеся подобных программных систем. Опишем их более подробно. Система розпізнавання номерних знаків CARMEN.CARMEN – система розпізнавання номерних знаків, має всі можливості для забезпечення високоякісного паркування, охорони і контролю доступу по номерному знаку, який розпізнається системою. Характеризується як дуже точна, відмовостійка, стабільна і швидка система [3]. Система CARMEN спеціально розроблена для паркувальних систем, систем безпеки та систем контролю доступу. Вона має унікальний рівень інтеграції розпізнавання знака, технології отримання відео та обробки зображень з відео потоків, в той же час вона як і раніше пропонує користувачеві найвищу технологічну гнучкість.
Також вона забезпечує високий рівень технологічної продуктивності серед інших систем розпізнавання, система CARMEN пропонує величезну гнучкість – схвалена виробниками і інтеграторами.
Система CARMEN поставляється з якісним драйвером для захоплення зображень і потокового відео, забезпечуючи швидку установку і використання системи для паркування транспортних засобів і систем контролю доступу.
Також до складу системи CARMEN входить Software Development Kit (SDK) – набір модулів, який спрощує інтеграцію. Легко, швидко і економічно ефективно. Паркувальні системи, системи контролю доступу, системи безпеки працюють під контролем системи CARMEN, забезпечуючи високу точність розпізнавання, відмовостійкості, високу швидкість роботи.
Особливості системи CARMEN. Дана система пропонує гнучкі, низькі експлуатаційні витрати, представляючи ефективні та інтелектуальні технології для експлуатації парку автомобілів. Система зменшує витрати, а також підвищує ефективність і безпеку. Система для контролю парковки є однією з основних технологій, і не є повноцінною. Вона була спеціально розроблена і створена, щоб легко бути інтегрованою в комплекс паркування та контролю доступу. Така гнучка система може бути адаптована для задоволення особливих вимог замовника.
Система розпізнавання номерних знаків CARMEN містить наступні компоненти:
-
движок/ядро системи автоматичного розпізнавання номерних знаків;
FXVD4mc_s карта захвату;
функції бібліотеки (ANSI C / C++, MSVC / C++, Delphi і MSVB, ActiveX, OCX);
демо- і тест-програми;
підручник і приклади програм, як в виконуваному вигляді, так і у вигляді вихідного коду.
Spike+ являє собою компактну, міцну і повністю інтегровану систему розпізнавання номерного знака в камеру, також виробляє підсвічування і процесор для системи розпізнавання в одному герметичному корпусі[4]. Spike+ є унікальним продуктом, і виграв престижну нагороду Queens Award for Innovation[5]. Різноманітність об’єктивів доступних для різних фокусних вимог довжини. Способи зберігання Compact Flash дозволяє зберігати і буферізіровать дані. Spike+ може використовуватися через веб-протокол, і пропонує різноманітні можливості підключення, включаючи бездротові мережі. Додаткові продукти, такі як Spike+ Interface Box дозволяє швидко і легко розгортати Spike+.
Камера Spike+ проста в установці, що робить її ідеальним для установки в труднодоступних або прихованих умовах. Незважаючи на свій невеликий розмір, Spike+ дуже надійний і призначений для забезпечення безперебійної роботи в будь-яких погодних умовах 24 години на добу.
Програми для камери Spike+. Talon Mobile – додаток розпізнавання автомобільних номерних знаків, що володіє функціями SpeedPlate і VeriPlate, які призначені для використання «на ходу» патрулюванням поліції, надаючи начальству і користувачам гнучкість і оперативну «досяжність» для визначення інформації про область, які виходять за рамки основних систем розпізнавання автомобільних номерів[6]. Окрім цього, система може працювати, коли автомобіль нерухомий або припаркований на шосе, на блокпостах і контрольно-пропускних пунктах.
Типові мобільні додатки для автоматичного розпізнавання номерних знаків складається з системи і движка ядра Talon, що використовуються для процесу визнання номерного знака. Користувач контролює і управляє системою за допомогою функції SpeedPlate або Veriplate систем прикладного програмного забезпечення розпізнавання автомобільних номерів, що дозволяє використовувати дані, як місцевих, так і національних баз даних.
Дополнительные функции:
-
точність читання більше 97% ;
підключення до системи Northgate BOF 2.2;
запис дати і часу.
Області застосування:
-
поліцейський патруль автомобілів;
судові пристави і транспортні засоби цивільних агентств;
встановлення на мобільний дата-термінал.
Компанія Vigilant video досліджувала динаміку використання розпізнавання номерних знаків, починаючи від потреб кінцевого користувача до безпосередньо самого виробничого процесу. Результати надали запропонувати продукт, який може вважатися найбільш просунутим за сьогоднішніми мірками. Система CarDetector дозволяє користувачеві будь-якого рівня керувати можливостями програмного пропозиції. В комплекті системи йде короткий курс навчання.
Можливості:-
інфрачервоне і кольорове відображення номерів;
запис пропущених знаків;
інтеграція з різними камерами відеоспостереження;
централізована система управління системою;
можливість установки серверної і клієнтської частини.
Підтримка до 35 камер [7] відеоспостереження для розпізнавання знака, підключених до одного сервера. Сучасна технологія оптичного розпізнавання символів, яка управляється системою через бездротові мережі. Система CarDetector дає максимально активні можливості, які забезпечують захист необхідних територій.
Система Авто-Інспектор
- програмно-апаратний комплекс, що забезпечує розпізнавання номерів рухомих автомобілів, надійно працює в широкому діапазоні зовнішніх умов, легко інтегрований з охоронним обладнанням, виконавчими пристроями і зовнішніми базами даних [8].
У системі Авто-Інспектор
реалізовані функціональні можливості необхідні для ефективного вирішення завдань на різних об’єктах: від забезпечення схоронності автомобілів в межах автостоянки, до контролю за пересуванням транспорту в масштабах підприємства, окремої магістралі, цілого міста.
Основні функціональні можливості: [9]:
-
розпізнавання реєстраційного номера автомобіля виявлення появи автомобіля в кадрі;
розпізнавання всіх видів українських номерів; можливість адаптації до стандартів номерів будь-якої країни світу;
успішна робота модуля в будь-яких погодних умовах;
вибір кадру з оптимальним розміром і чіткістю реєстраційного номера;
одночасне розпізнавання в зоні контролю декількох номерів (переклад відеозображення в текстовій формат);
ефективна взаємодія з різними охоронними системами (охоронного телебачення, контролю доступу);
запис кожного проїзду, в’їзду/виїзду транспортних засобів, створення баз даних.
Система "Трафік-КОНТРОЛЬ", система зважування автомобілів і розпізнавання номерів. Програмне забезпечення "Трафік-КОНТРОЛЬ" призначено для автоматизованого контролю транспортного потоку і володіє наступними функціональними можливостями:
-
одночасне зважування і розпізнавання номера автомобіля;
розпізнавання державного номера транспортного засобу;
пошук відповідності між визначеним державним номером і наявними номерами в БД;
визначення швидкості руху транспортних засобів;
централізована реєстрація та обробка подій, генерація оповіщень і керуючих впливів відповідно до гнучко настроюються алгоритмами;
формування фото і відеоархіву.
Система "Трафік-Контроль" являє собою програмно-апаратний комплекс, призначений для зважування, контролю в’їзду, виїзду та переміщення автомобільного транспорту по території підприємства, а також обліку ввезених і вивезених вантажів. Найважливішою інновацією системи "Трафік-Контроль" є комплекс автоматичного розпізнавання номерів автомобілів, що дозволяє істотно знизити вплив людського фактора і тим самим підвищити надійність функціонування системи. Даний комплекс надійно працює в широкому діапазоні зовнішніх умов і забезпечує надійне розпізнавання номера автомобіля в денний і нічний час, за будь-яких погодних умовах і на швидкості автомобіля до 150 км/г. Гнучкість системи дозволяє забезпечити її інтеграцію з вже наявною інформаційною системою підприємства, охоронним обладнанням. Також можлива побудова загальної інформаційної системи підприємства на базі системи "Трафік-Контроль".
4. Основні етапи в розпізнаванні номерного знака транспортного засобу
Автоматична ідентифікація транспортних засобів є важливим етапом в інтелектуальних транспортних систем. В даний час транспортні засоби відіграють дуже велику роль у транспортуванні. Крім того, використання транспортних засобів збільшується через зростання населення і потреб людини в останні роки. Таким чином, контроль транспортних засобів стає великою проблемою, і її набагато важче вирішити. Автоматичні системи ідентифікації транспортного засобу використовуються для ефективного управління. Розпізнавання номерного знака є однією з форм автоматичної ідентифікації транспортних засобів. Це технологія обробки зображень використовується для ідентифікації транспортних засобів, використовуючи інформацію з номерного знаки. У режимі реального часу номерний знак відіграє важливу роль в автоматичному моніторингу правил дорожнього руху і підтримці порядку на дорозі [10].
Lotufo, Morgan и Johnson [11] запропонували автоматичну систему розпізнавання номерного знака з допомогою оптичних методів розпізнавання символів. Fahmy [12] запропонував метод двобічної асоціативної пам’яті нейронної мережі для читання номерних знаків. Цей метод підходить для невеликої кількості моделей. Nijhuis, Ter Brugge, Helmholf J.P.W. Pluim, L. Spaanenburg, R.S. Venema та M.A.Westenberg [13] пропонували використання нечіткої логіки і нейронних мереж для номерних знаків транспортних засобів. Цей метод використовував нечітку логіку для сегментації і дискретно-часові клітинні нейронні мережі для виділення ознак. Choi [14] й Kim [15] запропонували метод, заснований на використанні вертикального краю Хью перетворення для вилучення номерного знака. E.R. Lee, P.K. Kim та H.J. Kim [16] використовували нейронні мережі для витягання кольору і шаблон для розпізнавання символів. S.K. Kim, D.W. Kim і H.J. Kim [17] використовували генетичний алгоритм для сегментації, щоб витягти область з номерним знаком. Hontani [18] запропонував спосіб вилучення символів без знання їх положення і розмірів зображення. Парк та інші [19] розробили метод вилучення корейських номерних знаків в залежності від кольору номерного знака. H.J. Kim, D.W. Kim, S.K. Kim, J.V. Lee, J.K.Lee [20] запропонували метод вилучення області номерного знака на основі сегментації кольорових зображень з генетичного розподілу. Різноманітність підходів до знаходження номерного знака показує, наскільки актуальна ця задача.
Структура системи розпізнавання номерних знаків транспортного засобу.На вхід системи надходить зображення транспортного засобу, захоплене камерою. Захоплені зображення взяті з відстані 4-5 метрів обробляються через підсистему вилучення номерного знака з наданням його на вхід до підсистеми сегментації. Сегментація відокремлює символи окремо. І, нарешті, підсистема розпізнавання визначає символи, надаючи результат як номерний знак транспортного засобу.
Витяг області номерного знака.
Витяг області номерного знака є першим етапом в алгоритмі розпізнавання номерного знака транспортного засобу. Зображення, спочатку відзняте з камери, перетворюється в двійкове зображення, що складається тільки з 1 і 0 (тільки чорний і білий колір). Використовуючи поріг для пікселів 0 (чорні) для всіх пікселів вихідного зображення з яскравістю менше порогового значення та 1 (білі) для всіх інших точок. Захоплене зображення (вихідне зображення) і бінарізірованное зображення показано на рисунку 1. Бінарізірованное зображення можна обробляти з використанням різних методів. Щоб знайти область знака, використовується алгоритм розмиття. Розумієте - метод вилучення тексту з змішаного зображення. Алгоритм розмиття обробляє зображення по вертикалі і горизонталі. Якщо кількість білих пікселів менше бажаного порога або більше, ніж будь-який інший бажаний поріг, білі пікселі перетворюються на чорні. Після розмиття, морфологічна операція, розширення, застосовується до зображення для вказівки розташування знака. Однак, може бути більше одного кандидата на номерний знак. Щоб знайти точне положення і усунути інші області, деякі критеріальні тести застосовуються для розмиття зображення і його фільтрації. Оброблені зображення після цього етапу показані на рисунку 1.
Сегментація
В сегментації символів номерного знака, він ділиться на складові частини для отримання символів окремо. По-перше, зображення фільтрується для поліпшення вигляду і видалення шумів і небажаних плям. Потім застосовується операція розширення до зображення для поділу символів один від одного, якщо символи близькі один до одного. Після цієї операції, горизонтальне і вертикальне розмиття застосовується для пошуку символьних областей. Наступним кроком є обрізка символів номерного знака. Це робиться шляхом знаходження початкової та кінцевої точок символів в горизонтальному напрямку. Окремі символи, вирізані з знака, показані на рисунку 1.

Рисунок 1 – Візуальне представлення процессу виділення символів номерного знака для подальшого розпізнавания (анимация: 7 кадрів, 8 циклів повторення, 83 кілобайта)
Розпізнавання символів
Перш, ніж почати алгоритм розпізнавання, символи необхідно нормалізувати. Нормалізація полягає в уточненні символів в блок, що містить ніяких додаткових пробілів (пікселів) у всіх чотирьох сторонах символу. Потім кожен символ підганяється під однаковий розмір. Підгонка під однаковий розмір необхідна для відповідності шаблону. Для порівняння символів, вводні зображення повинні бути однакового розміру з символами з бази даних. Наступний крок - збіг з шаблоном. Збіг з шаблоном є одним з ефективних алгоритмів розпізнавання символів. Зображення символу порівнюється з символами в базі даних і потім вимірюється краще схожість.
Приклад шаблонів символів дивитесь на рисунку 2.

Рисунок 2 – Шаблони для розпізнавання
Використання ковзаючого вікна з методом збігу шаблону.
Ковзаюче вікно, використовуючи метод збігу шаблону (сума квадратів різниць), є загальною і практичної технікою використовуваної в багатьох додатках розпізнавання зображень [21, 22]. Цей метод дає високу точність розпізнавання і скорочує час обробки в порівнянні з іншими методами, такими як крос-кореляція. Метод обчислює суму квадратів різниць в кожній позиції, в той час як словесний образ, який ми хочемо розпізнати, рухається під фоновим шаблоном. Точка, в якій сума квадратів різниці менше заданого порогу буде розглядатися як точка збігу. По-перше, визначається вікно містить об’єкт розміром менше, ніж у основного зображення. Тільки частину зображення видно через це вікно. Функція збігу шаблонів здійснюється між об’єктами у вікні і відповідної області зображення. Потім вікно зсувається, і функція збігу шаблонів застосовується між об’єктами у вікні, і нова частина зображення видно через вікно. Таким чином, вікно переміщається зліва направо і зверху вниз по кроках зсуву пікселів, поки не покриється все зображення, і метод збігу шаблонів не здійсниться для всіх різних позицій вікна. Математично, міра дистанції є мірою подібності або загальних властивостей між двома сигналами. Зазвичай використовується метрика Мінковського [23]:

Рисунок 3 – Метрика Мінковського
де X, Y два N-мірних вектора ознак, а r є фактором Минковского. І коли r = 2, це насправді Евклідова відстань.
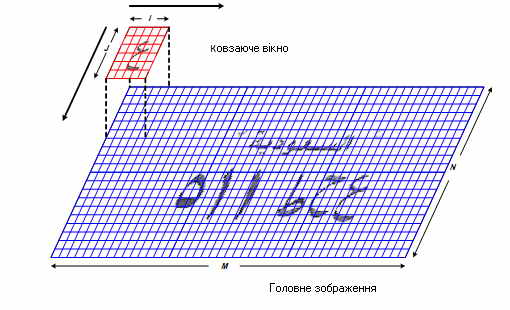
Рисунок 3 – Ковзаюче вікно та метод збігу шаблону
Багатошарова нейронна мережа для розпізнавання символів номерного знака.
Багатошарова нейронна мережа може моделювати функцію практично будь-якого ступеня складності, причому число шарів і число елементів в кожному шарі визначають складність функції [24]. изначення числа проміжних шарів і числа елементів в них є важливим питанням при конструюванні. Серед багатошарових нейронних мереж можна виділити чотири найбільш значущих і важливих класів нейронних мереж:
-
мережі прямого поширення – всі зв’язки направлені строго від вхідних нейронів до вихідних. Такі мережі ще називають багатошаровим персептроном, за аналогією зі звичайним персептроном Розенблатта, в якому тільки один прихований шар;
реккурентним нейронні мережі або мережі зворотного поширення – сигнал в таких мережах з вихідних нейронів або нейронів прихованого шару частково передається назад на входи нейронів вхідного шару;
радіально базисні функції – вид багатошарової нейронної мережі, що має прихований шар з радіальних елементів і вихідний шар з лінійних елементів. Мережі цього типу досить компактні і швидко навчаються. Радіально базисна мережа володіє наступними особливостями: один прихований шар, тільки нейрони прихованого шару мають нелінійну активаційну функцію і синаптичні ваги вхідного і прихованого шарів дорівнюють одиниці;
мережа Кохонена. Такий клас багатошарових нейронних мереж, як правило, навчається без учителя і успішно застосовується в задачах розпізнавання. Мережі такого класу здатні виявляти новизну у вхідних даних: якщо після навчання мережа зустрінеться з набором даних, несхожим ні на один з відомих зразків, то вона не зможе класифікувати такий набір і тим самим виявить його новизну. Мережа Кохонена має всього два шари: вхідний і вихідний, складений з радіальних елементів.
Хороший результат розпізнавання дають нейромережі зворотного поширення помилки і мережі Кохонена. Нейромережі зворотного поширення по структурі аналогічні мережі Кохонена, але функціонують і навчаються інакше. Сигнал з вихідних нейронів або нейронів прихованого шару частково передається назад на входи нейронів вхідного шару (зворотний зв’язок) [25].
Серед переваг можна виділити те, що зворотне поширення – ефективний і популярний алгоритм навчання багатошарових нейронних мереж, з його допомогою вирішуються численні практичні завдання.
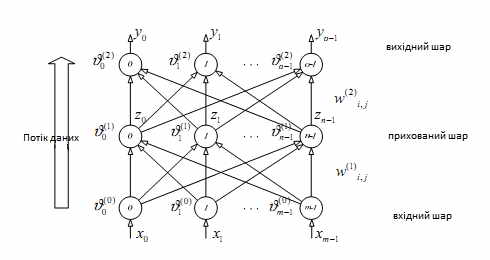
Рисунок 4 – Нейронна мережа з зворотним поширенням помилки
Висновки
Метою даної дослідницької роботи було вивчення алгоритмічних і математичних аспектів розпізнавання номерних знаків транспортних засобів, такі як проблематика машинного зору, розпізнавання образів і символів, використання для цього нейронних мереж та інших методів. Для розробки ефективної системи обробки зображень з камер відеоспостереження необхідно мати не тільки необхідне обладнання, але також відповідне програмне забезпечення, яке дозволить правильно й ефективно проводити операції для контролю над територією, яка призначена для проїзду транспортних засобів.
Дослідження та вибір найбільш придатних до конкретної задачі методів виділення областей зображення, його обробки методами сегментації та бінаризації дозволить знизити вимоги до умов розпізнавання, що дуже важливо в задачі розпізнавання номерного знака транспортного засобу.
У рамках проведених досліджень виконано:
-
Розроблено структуру програмної системи та визначено функції її складових.
На підставі аналізу літературних джерел виділено основні алгоритми, які можуть бути використані при проектуванні заданої автоматизованої системи.
Розглянуто можливості комплексної автоматизації системи обробки зображення з камер відеоспостереження, оцінені вимоги до програмного забезпечення, виконаний пошук функціонально подібних програмних продуктів та проведено аналіз переваг і недоліків.
Подальші дослідження спрямовані на наступні аспекти:
-
Грунтуючись на результатах ефективності нейронних мереж, зроблено висновок про можливість застосування нейронної мережі або iнших методiв в розпізнаванні сегментованих символів номерного знака.
Адаптація відомих методів обробки та поліпшення зображень з метою максимізації якості визначення номерного знака.
Розробка функціональної системи автоматизованої обробки зображень з камер відеоспостереження, що реалізує запропонований спосіб визначення номерного знака транспортного засобу.
При написанні даного реферату магістерська робота ще не закінчена. Остаточне завершення: грудень 2012 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Martinsky Ondrej – Algorithmic and mathematical principles of automatic number plate recognition systems [Текст] / B.SC. Thesis. — Brno University of technology, faculty of information technology, department of intelligent systems, 2007. — 76 с.
- FastVideo. Скоростная съемка с камер видеонаблюдения [Электронный ресурс]. – Режим доступа: Ссылка
- Automatic Number Plate Recognition, The CARMEN Parking ANPR Software [Электронный ресурс]. – Режим доступа: Ссылка
- PIPS Technology - Spike+ [Электронный ресурс]. – Режим доступа: Ссылка
- Queens Award for Innovation [Электронный ресурс]. – Режим доступа: Ссылка
- NDI Recognition Systems UK - Vehicle based ANPR applications [Электронный ресурс]. – Режим доступа: Ссылка
- Vigilant Video, Fixed Camera LPR Systems, CarDetector Software [Электронный ресурс]. – Режим доступа: Ссылка
- Компания Инком. Комплексы безопасности. [Электронный ресурс]. – Режим доступа: Ссылка
- НПО "Дискрет"- Трафик-КОНТРОЛЬ, система взвешивания автомобилей и распознавания номеров. [Электронный ресурс]. – Режим доступа: Ссылка
- Bailey D.G., Irecki D., Lim B.K. and Yang L., Test bed for number plate recognition applications, Proceedings of First IEEE International Workshop on Electronic Design, Test and Applications ( DELTA’02 ), IEEE Computer Society, page 501, 2002.
- Lotufo R.A., Morgan A.D., and Johnson AS., 1990, Automatic Number-Plate Recognition, Proceedings of the IEE Colloquium on Image analysis for Transport Applications, V01.035, pp.6/1-6/6, February 16, 1990.
- Fahmy M.M.M., 1994, Automatic Number-plate Recognition : Neural Network Approach, Proceedings of VNIS’94 Vehicle Navigation and Information System Conference, 3 1 Aug-2 Sept, pp.291-296, 1994
- Nijhuis J.A.G. , Brugge Ter M.H., Helmholt K.A., Pluim J.P.W., Spaanenburg L., Venema L., Westenberg M.A., 1995, Car License PlateRecognition with Neural Networks and Fuzzy Logic, IEEE International Conference on Neural Networks, pp.2232-2236, 1995
- Choi H.J., 1987, A Study on the Extraction and Recognition of a Car Number Plate by Image Processing, Journal of the Korea Institute of Telematics and Electronics, Vo1.24, pp. 309-315,1987.
- Kim H.S., et al., 1991, Recognition of a Car Number Plate by a Neural Network, Proceedings of the Korea Information Science Society Fall Conference, Vol. 18, pp. 259-262, 1991
- Lee E.R., P.K. Kim, and H.J. Kim, 1994, Automatic Recognition of a Car License Plate Using Color Image Processing, Proceedings of the International Conference on Image Processing, Lecture Notes in Computer Science, pp.307-314, 2005
- Kim S.K., Kim D.W., and Kim H.J., 1996, A Recognition of Vehicle License Plate Using a Genetic Algorithm Based Segmentation, Proceedings of 3rd IEEE International Conference on Image Processing, V01.2., pp.661-664, 1996
- Hontani H., and Koga T., (2001), Character extraction method without prior knowledge on size and information, Proceedings of the IEEE International Vehicle Electronics Conference (IVEC’01), pp. 67-72.
- Park, S. H., Kim, K. I., Jung, K., and Kim, H. J., (1999), Locating car license plates using neural network, IEE Electronics Letters, vol.35, no. 17, pp. 1475-1477.
- Kim H.J., Kim D.W., Kim S.K., Lee J.V., Lee J.K., 1997, Automatic Recognition of Car License Plates Using Color Image Processing, Engineering Design & Automation, 3(2), pp.215-225, 1997
- Fairhurst M.C and Hoque M.S, Moving Window Classifier: a new approach to off-line image recognition. Electronics letters, 36(7), pp.628-630, 2000.
- Hoque M.S and Fairhurst M.C, Face recognition using the moving window classifier. In proc. Of 11th British Machine Vision Conference (BMVC2000), Bristol, UK, pp. 312-321, 2000.
- B.Li, Chang E., and Wu Y., Discovery of a Perceptual Distance Function for Measuring Image Similarity, ACM Multimedia Journal Special Issue on Content based, pp.512-522, Volume 8, Number 6, p.512-522, 2003.
- Портал искусственного интеллекта. [Электронный ресурс]. – Режим доступа: Ссылка
- Головко В.А. Нейронные сети: обучение, организация и применение: Учеб. пособие по направлению подгот. бакалавров и магистров "Прикладная математика и физика"; Под общ. ред. А.И. Галушкина.— Москва: Редакция журнала "Радиотехника", 2001 .— 256 с.