Тимошенко Максим Александрович
Факультет: Компьютерныx информационных технологий и автоматики
Кафедра: Электронной техники
Специальность: «Электронные системы»
Тема магистрской работы: Исследование и обоснование структурной схемы системы распознавания препятствий применительно к конвертоплану
Научный руководитель: доц. к.т.н., Сенько Виктор Федорович
Дата рождения:
24.08.1990 г.
Место рождения:
г. Донецк
Школы:
1997–2003 гг., Школа №115;
2003–2005 гг., Школа №31;
2005–2007 гг., Лицей «Наукова зiрка Донбасу».
ВУЗ:
2007–2011 гг., Донецкий государственный университет управления, бакалавр, менеджмент в непроизводственной сфере;
2012–2013 гг., Донецкий национальный технический университет, магистр, электронные системы.
Средний балл:
3.8
Владение языками:
Русский язык – в совершенстве;
Украинский язык – высокий уровень;
Английский язык – выше среднего.
Личные достижения:
3 место (среди новичков) по Капоэйре – Первый Всеукраинский чемпионат, г. Краматорск, 15–16 сентября 2007г.
Увлечения:
Игры – в основном стратегии, бестселлеры разных жанров; книги –научные, технические; музыка – преимущественно электронная, совмещение электронной с некоторыми классическими инструментами; конструирование и разработка различного рода цифровых и цифро-аналоговых устройств; участник роллер спорта.
Личные качества:
Доброжелательность, креативность, нацеленность на результат.
Профессиональная специализация и владение компьютером:
• Операционные системы: Windows 98, XP, 7, 8; Android 2.2 и выше;
• Языки программирования: Assembler, C;
• Среды разработки: CodeVisionAVR, AVR Studio;
• Моделирование: Labview, Multisim, Proteus;
• Дополнительные: Adobe (Photoshop, Audition, After Effects), 3D Studio Max;
• Прикладные программы: MS Office.
Дополнительные курсы, стажировки, гранты:
Отсутствуют.
Опыт работы:
2011г. ООО «Социс», помощник менеджера.
Планы на будущее:
Самообучение и совершенствование знаний в области цифровой и цифро-аналоговой электроники.
Контактная информация:
E-mail: cooold@meta.ua
Skype: C0oo1D
Я, Тимошенко Максим Александрович, родился 24 августа 1990 года в городе Донецке.
Папа, Тимошенко Александр Григорьевич, после 15 лет работы на шахте «Кировская» и смене нескольких работ, находится на пенсии. Мама, Тимошенко Ирина Владимировна, имея 38 лет трудового стажа, тоже находится на пенсии.
В детстве был не особо активным, поэтому большого количества друзей не было. Зато был лучший друг, на которого я всегда мог положиться. Так же по соседству жил двоюродный брат, так что скучать не приходилось, всегда находили чем занятся. С самого детства мне нравилось разбираться в различных электронных устройствах. Мне было интересно, как они работают и почему. Ругали меня достаточно часто, т.к. даже после запретов на разборку работающей техники, я продолжал разбирать почти все, что попадалось мне под руку, что как то моргает или двигается. Запреты были по той причине, что после разборки собрать обратно я не всегда мог, и это приходилось делать моему папе. С детства, кроме разбирания меня так-же увлекало и собирание, в частности всяких моргалок, гирлянд, и других поделок. У папы была целая тетрадь с различными схемами, так что когда брата поблизости не было – я собирал различные безделушки.
В 1997 г. пошел в школу №115, в которой углубленно изучались два иностранных языка. Моим классным руководителем была Нина Николаевна, благодаря ее наставлениям, в моей жизни остались приятные воспоминания о первых классах. В 2000 году родители купили первый компьютер. Официально, он нужен был для моей сестры, которой в тот момент необходимо было начать осваивать дизайнерские программы. Но, ясное дело, что я внес свои коррективы, и большую часть времени проводил за ним я. В шестом классе, в связи с переездом, добираться до школы стало утомительным и проблематичным, пришлось перевестись в школу по месту жительства, №31. Учился я тогда не очень хорошо, т.к. часто болел и лежал в больницах. Позже, в конце 9 класса, мать решила перевести меня в частный лицей, которым был «Наукова зірка Донбасу», где моя успеваемость немного поднялась.
После успешного окончания лицея (9–11 классы), поступил на факультет менеджмента в Донецкий государственный университет управления (ДонГУУ). С первого курса я чувствовал, что нахожусь не там, где хотелось бы, но продолжал учиться. Одновременно с поступлением, начал кататься на роликах и осваивать микроконтроллеры. После окончания бакалаврата в 2011 году, университет управления мне окончательно надоел, и мне захотелось пойти на техническую специальность. Большинство моих друзей на тот момент учились в Донецком национальном техническом университете (ДонНТУ), и просто недоумевали почему я поступил на менеджера, когда знаю в технической части больше чем большинство студентов их групп. В итоге я решил поступить в ДонНТУ, и по советам друзей, ближе всего ко мне была специальность электронных систем.
Сначала решил поступить на заочную форму обучения, на 4 семестр (2 курс 2 семестр), но позже передумал и решил поступить сразу на 5 курс очной формы. Т.к. знание английского у меня было на тот момент выше среднего уровня, прошел сразу на магистра. Впервые за многие годы мне нравилось учиться. Коллектив попался хороший, адаптировался относительно быстро. Побаивался первой сессии, но она прошла гораздо легче, чем любая из тех, которые я проходил ранее. Моим научным руководителем стал Сенько Виктор Федорович. Как позже подсказали мне одногрупники – он строгий, но всегда обьяснит если что не понятно. Когда нужно было придумать тему магистерской работы, я задумался, т.к. мне не хотелось заниматься вещами, которые я увижу только на бумаге. Тема должна была вызывать интерес и желание к действиям. Проанализировав то, как объединить приятное с полезным, было решено создать систему, которая бы помогла автоматизировать процесс перемещения летательных аппаратов, в частности беспилотных, и сократить вероятность аварий. Простым автопилотом это нельзя было назвать, т.к. автопилот – статическая система контроля, а мне хотелось сделать динамическую и адаптивную.
Главным приоритетом на момент написания магистерской работы, является ее успешная защита. Активное применение полученных знаний началось со второй курсовой работы, что упростило процесс конструирования устройства. В будущем, для достижения своих целей, планирую не забрасывать полученные в процессе обучения знания.
Реферат по теме выпускной работы
Введение
На данный момент существует множество различных средств для физического перемещения того или иного объекта. Если в качестве объекта брать человека, то этот перечень начинается с велосипедов, роликов, мотоциклов, автомобилей, и заканчивается самолетами, вертолетами, пилотируемыми космическими кораблями. Если же в качестве объекта взять, например, видео или фото камеры, любой другой небольшой груз – этот список рациональнее будет начать с радиоуправляемых наземных и воздушных моделей. Но, как правило, такие модели не снабжают системами автопилота, да и автопилот, по сути, не динамичен.
Автопилот – устройство или программно-аппаратный комплекс, ведущий транспортное средство по определённой, заданной ему траектории [1]. Данное определение предусматривает статическую траекторию полета. Это еще можно применять на больших высотах, но как быть с низкими, или вообще наземными передвижениями? Тут статические траектории не помогут, т.к. ситуация постоянно меняется. Сегодня была равнина – завтра мегаполис, сегодня тут не было столба – завтра он есть. Все меняется, а технологии автопилота несколько устарели.
В данном случае не обойтись без системы, которая бы обнаруживала препятствия на своем пути и меняла траекторию движения, чтобы задавались лишь конечные координаты, а весь процесс перемещения был динамичен и рационален. Для этого, так или иначе, будет необходим массив различных датчиков, т.к. препятствия бывают различных типов, и не все датчики смогут их зафиксировать.
Конвертоплан
Конвертоплан – летательный аппарат с поворотными винтами, которые на взлёте и при посадке работают как подъёмные, а в горизонтальном полёте – как тянущие (при этом подъёмная сила обеспечивается крылом самолётного типа). Конструкция по сути очень близка к самолёту вертикального взлёта и посадки (СВВП), но обычно их относят к винтокрылым летательным аппаратам из-за конструктивных особенностей винтов и их большого диаметра, сравнимого с размахом крыла. Большие винты конвертоплана помогают ему при вертикальном взлете, однако в горизонтальном полете они становятся менее эффективными по сравнению с винтами меньшего диаметра традиционного самолета [2].
В настоящее время в США эксплуатируется действующий образец конвертоплана V-22 Osprey с полётной массой 27,4 т и скоростью полёта в самолётном режиме 463 км/ч, а в вертолётном режиме 185 км/ч.
Конвертоплан с поворотными винтамиКонвертоплан с поворотными винтами (tiltrotor) – летательный аппарат, совмещающий вертикальный взлёт/посадку по вертолётному принципу с перемещением со скоростью турбовинтового самолёта.
Обычно поворотными являются не сами винты, а гондолы с винтами и двигателями (как у Bell V-22 Osprey), но встречаются также и конструкции, у которых поворачиваются только винты, а двигатели (например, расположенные в фюзеляже) остаются неподвижными. Примером винтокрыла, у которого поворачиваются только винты, является Bell XV-3 [3].
Нужно отметить, что термин тилтротор не является эквивалентом конвертоплану, поскольку является конкретной схемой реализации конвертоплана.
Конвертоплан с поворотным крыломСуществует вариант конвертоплана, называемый конвертоплан с поворотным крылом (Tiltwing, от tilt – поворачивать и wing – крыло), когда поворачивается всё крыло, а не только законцовки, как у тилтротора [4].
Недостатком поворотного крыла является большая сложность, достоинством же то, что при вертикальном взлёте крылья не затеняют воздушный поток от винтов (увеличивая тем самым эффективность работы винтов).
Конвертоплан с винтами в кольцевых каналахСамолёты с вертикальной (или укороченной) взлёт-посадкой с винтами в кольцевых каналах могут относиться как к имеющим поворотные винты, так и к имеющим поворотное крыло.
Особенностью же их является то что винты расположены внутри особого кольца, которое иногда называется «кольцевым» крылом, в авиа моделировании же такой винт в кольцевом канале, часто называется термином «вентиляторным» движителем (в авиа моделировании такой винт обычно прячут внутри макета реактивного двигателя). Данный тип движителя обладает очень высокой скоростью отбрасываемого винтом воздушного потока, что позволяет обойтись очень маленькими крылышками, обеспечивая высокую компактность конвертоплана. Это же достоинство оборачивается серьёзным недостатком при выполнении функций вертолёта, вследствие чего финансирование разработок подобных конвертопланов прекращалось, как только речь заходила об их способности полностью заменить вертолёт.
Примерами подобных конвертопланов являются Bell X-22A, VZ-4DA и Nord 500 [5].
СВВП с вертикальным положениемСамолёт вертикального взлёта и посадки с вертикальным положением корпуса (tailsitter, от tail – хвост и sitter – сидящий) – вариант компоновки СВВП. Такой самолёт осуществляет взлёт и посадку на свой хвост подобно взлёту и посадке вертолёта, а затем переходит в горизонтальный «самолётный» полёт. Несмотря на невозможность посадки «по самолётному», конвертопланом не является, так как при переходе в горизонтальный режим полёта не происходит поворота винтов относительно крыла и фюзеляжа летательного аппарата.
Сложность схемы состоит в организации управления на режимах вертикального и горизонтального полетов, а также переходных – летчику сложно сориентироваться, потому как одни и те же органы управления выполняют разные функции на разных режимах, кроме того затруднен обзор при вертикальных режимах. Тем не менее отсутствие больших поворотных частей, а также единая силовая установка для режимов вертикального и горизонтального полёта позволяли упростить конструкцию аппарата и эта схема долгое время была популярна у конструкторов. Данную схему использовали как реактивные, так и винтовые СВВП. Немногие построенные по этой схеме СВВП так и остались экспериментальными прототипами.
Автопилот
Существует несколько основных методов для обнаружения препятствий, это:
- Светодиодный;
- Лазерный;
- Ультразвуковой;
- Радиоволновой;
- Техническое зрение.
Все методы, кроме последнего, действуют по принципу локации (рис. 1), разный у них лишь источник сигнала и его приемник.
Рисунок 1 – Принцип действия локатора, 1 – передатчик, 2 – приемник. Анимация состоит из 17 кадров с задержкой в 200мс между кадрами; задержка до повторного воспроизведения так-же составляет 200мс т.к. анимация бесконечного циклического типа.
Светодиодный и лазерный методы локации отличаются между собой тем, что лазерный диод обладает большей точностью, чем светодиод, но эффективен на дальних дистанциях т.к. ширина луча крайне мала. Светодиод же наоборот, эффективен на ближних дистанциях, и в связи с тем что луч гораздо шире – точность не велика. Схожесть методов в том, что принцип действия у них одинаковый. Излучатель испускает поток световых частиц, некоторая их часть хаотично рассеивается средой, но большая часть, если достигает непрозрачного тела в пределах радиуса действия – возвращается в приемник. Далее измеряется время отклика – время, за которое сигнал преодолевает путь из излучателя в приемник, при наличии непрозрачного тела в радиусе действия дальномера. Как светодиод, так и лазерный диод могут работать в одном из трех диапазонов электромагнитного излучения – инфракрасный, видимый и ультрафиолетовый. Наибольшую популярность приобрели инфракрасные и красные излучатели.
Ультразвуковой и радиоволновой методы отличаются друг от друга гораздо больше, если радиоволновой использует радиоизлучение, что является подвидом электромагнитного излучения, то ультразвуковой метод использует физические колебания для определения местонахождения объекта. В авиации используется радиоволновой метод, а некоторые живые организмы используют ультразвуковой метод.
Техническое зрение отличается от всех перечисленных выше методов. Для его реализации необходима видеокамера и программный или аппаратный блок обработки изображений. Суть заключается в том, что имитируется зрение человека, что несет за собой свои преимущества и недостатки.
Функциональные задачи технического зрения, характерные для робототехнических приложений, можно условно разделить по уровню их относительной сложности, в данной работе достаточно первого уровня – элементарного. К ним обычно относят: обнаружение наличия обьекта; измерение расстояния до обьекта, его линейных или угловых перемещений, скорости; измерение геометрических параметров обьекта; определение физических характеристик излучения от обьекта; подсчет числа обьектов и др [6].
Польза системы заключается в высокой скорости работы, возможности 24-часовой работы и точности повторяемых измерений. Так же преимущество технического зрения перед людским заключается в отсутствии утомляемости, болезней или невнимательности. Тем не менее, люди обладают тонким восприятием в течение короткого периода и большей гибкостью в классификации и адаптации к поиску других проблем [7].
Применение технического зрения в системе обнаружения препятствий весьма сложно, т.к. сгруппировать объекты как препятствия по какому-то одному принципу практически невозможно, правда это зависит от ситуации. Самый часто используемый пример применения технического зрения как системы распознавания препятствий, это метод бинаризации. Данный метод заключается в преобразовании изображения в серых тонах в бинарное (белые и черные пиксели) с дальнейшей обработкой. Но это лишь один из возможных методов построения карты препятствий, нужно также применять метод сегментации (используется для поиска и/или подсчета деталей), метод измерения (измерение размеров объектов в дюймах или миллиметрах), и метод обнаружения краев.
Для исследования и реализации примеров разных систем распознавания препятствий существуют различные соревнования, например RoboCup, Умник-Бот, Робофест, VEX Robotics и другие [8].
На данный момент, вопросам распознавания препятствий в контексте автопилотирования уделяют слишком мало внимания, хотя направление весьма перспективно для автоматизации процессов передвижения наземных и воздушных объектов различных размеров и назначений.
Автопилоты беспилотных летательных аппаратов (БПЛА)
Задачи, решаемые в настоящее время с помощью беспилотных летательных аппаратов(БПЛА) требуют их полноценного приборного оснащения. Современный БПЛА по уровню технического оснащения зачастую превосходит пилотируемый самолет. Наличие полноценного автопилота – этим отличается беспилотный летательный аппарат от дистанционно управляемой модели [9].
В состав бортового комплекса навигации и управления БПЛА входят:- Интегрированная навигационная система;
- Приемник спутниковой навигационной системы;
- Модуль автопилота БПЛА.
- Автоматическое управление БПЛА при полёте по заданной траектории;
- Стабилизация углов ориентации БПЛА в полете;
- Определение навигационных параметров (координат, углов ориентации, параметров движения БПЛА);
- Выдача телеметрической информации о навигационных параметрах, углах ориентации и параметрах управления БПЛА;
- Управление бортовым оборудованием.
Автопилот БПЛА осуществляет выработку управляющих команд в виде ШИМ (широтно-импульсно модулированных) сигналов, сообразно законам управления, заложенным в его вычислитель.
Помимо навигации и управления БПЛА, автопилот программируется на управление бортовой аппаратурой:
- Стабилизация видеокамеры;
- Синхронизированное по времени и координатам срабатывание затвора фотоаппарата;
- Выпуск парашюта;
- Сброс груза или отбор проб в заданной точке;
- Другие функции.
В память автопилота может быть занесено до 255 поворотных пунктов маршрута. Каждая точка характеризуется координатами, высотой прохождения и скоростью полета. В полете автопилот также обеспечивает выдачу телеметрической информации для слежения за полетом БПЛА.
Управление БПЛАУправление БПЛА – задача для хорошо подготовленного профессионала. В армии США операторами БПЛА становятся действующие пилоты ВВС после годовой подготовки и тренинга. Во многих аспектах это сложнее, чем пилотирование самолета, и, как известно, большинство аварий беспилотных ЛА вызваны ошибками пилота-оператора [10].
Автоматические системы БПЛА, оснащенные полноценным автопилотом, требуют минимальной подготовки наземного персонала, при этом решают задачи на большом удалении от места базирования, вне контакта с наземной станцией, в любых погодных условиях. Они просты в эксплуатации, мобильны, быстро развертываются и не требуют наземной инфраструктуры. Высокие характеристики систем БПЛА, оснащенных полноценным автопилотом, снижают эксплуатационные издержки и требования к персоналу.
Важное примечание
На момент написания данного реферата магистерская работа не завершена. Окончательное завершение планируется в декабре 2013 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Источники
- Александров В.Г. Справочник по авиационному оборудованию (АиРЭО). – М., 1978,-398c.
- Ружницкий Е. И. Европейские самолёты вертикального взлёта. – М.: «Астрель»; «АСТ», 2000,-256c.
- Bell XV-3 (1955) [электронный ресурс]. – Режим доступа: http://www.aviastar.org/helicopters_eng/bell_xv-3.php
- U.S. Marine Corps Rotary/Tilt-Rotor Aviation 2011–2012 [электронный ресурс]. – Режим доступа: http://www.defensemedianetwork.com/stories/u-s-marine-corps-rotarytilt-rotor-aviation-2011-2012/
- Боднер В. А. Теория автоматического управления полётом. – М., 1964,-308c.
- Мошкин В. И. Техническое зрение роботов. – М.: Машиностроение, 1990,-272c.
- Davies E. R. Machine Vision : Theory, Algorithms, Practicalities. – M., 2004,-934c.
- Портал посвященный роботам и робототехнике [электронный ресурс]. – Режим доступа: http://myrobot.ru/
- Управление БЛА (БПЛА) [электронный ресурс]. – Режим доступа: http://www.teknol.ru/analitycs/BLA2/
- Испытан беспилотный разведывательный конвертоплан [электронный ресурс]. – Режим доступа: http://www.membrana.ru/particle/9629
Исследование основных методов обнаружения препятствий
Авторы: Максим Тимошенко, Виктор Сенько.
Описание: Обзор распространенных методов обнаружения обьектов и их краткая харрактеристика.
Источник: Cборник статей конференции «Автоматизация – Поиск Молодых» – Донецк, ДонНТУ, 2013.CRS Report for Congress
Автор: Bolkcom Christopher – Specialist in National Defense, Foreign Affairs, Defense, and Trade Division
Описание: Отчет Исследовательской Службы для Конгресса США о конвертоплане V-22 Osprey
Источник: http://digital.library.unt.edu/ark:/67531/metacrs7265/m1/1/high_res_d/RL31384_2005Aug04.pdfВ США разрабатывают конвертоплан 3-го поколения
Автор: Юферев Сергей
Описание: Факты и размышления о недавно представленном конвертоплане V-280 Valor третьего поколения.
Источник: http://forum.seacraft.sc/ru/index.php?/topic/1340-В-США-разрабатывают-конвертоплан-3-го-поколенияНемецкие проекты конвертопланов VC 400 и VC 500
Автор: Рябов Кирилл
Описание: Рассмотрение двух проектов немецких конвертопланов, появившихся в 60-х годах в Германии.
Источник: http://topwar.ru/28337-nemeckie-proekty-konvertoplanov-vc-400-i-vc500.htmlМануал HC-SR04
Автор: Шаров Денис
Описание: Переведённый и доработанный мануал на ультразвуковой дальномер HC-SR04
Источник: https://www.dropbox.com/s/owdw4am79a41o2q/Ultrasonic range finder HC-SR04.pdfРадиолокация
Описание: Принцип действия и применение радиолокационного оборудования
Источник: http://www.krugosvet.ru/enc/nauka_i_tehnika/voennaya_tehnika/RADIOLOKATSIYA.htmlУльтразвуковой измеритель дальности
Описание: Принцип действия ультразвукового измерителя дальности
Источник: http://bibliofond.ru/download_list.aspx?id=7480Компьютерное зрение
Авторы: Зуева Елена
Описание: В статье рассматриваются проблемы компьютерного зрения (техническое зрение, зрение роботов)
Источник: http://www.keldysh.ru/papers/2009/source/article/Zueva_09.docЭхолокация
Описание: Определение и краткая информация по эхолокации
Источник: http://ru.wikipedia.org/wiki/ЭхолокацияТехнические характеристики
Автор перевода: Тимошенко Максим
Описание: Технические характеристики конвертоплана V-22 Osprey
Источник: http://www.boeing.com/boeing/rotorcraft/military/v22/v22spec.page
Собственные публикации и доклады по теме магистерской работы
Тематические статьи
Переводы статей
Техническое зрение в системах управления 2011
Сборник трудов научно-технической конференции института космических исследований Российской академии наук за 2011 год.
Техническое зрение в системах управления 2012
Сборник трудов научно-технической конференции института космических исследований Российской академии наук за 2012 год.
http://engineering-solutions.ru/ultrasound/theory/#waves
Ультразвук. Основы теории распространения ультразвуковых волн.
Датчики
Справочник по разным типам датчиков.
Приемники оптического излучения
Систематизированы справочные данные по отечественным приемникам оптического излучения. Приведены классификация приемников оптическою излучения, краткое изложение физических принципов их действия, определения основных параметров и характеристик, технические данные: параметры, конструктивные размеры, относительные спектральные характеристики чувствительности, условия эксплуатации и др.
http://roboforum.ru/wiki/ИК_локатор_Робоклуба
Инфракрасный локатор.
http://new.ntpipc.ru/vertoletnyiy-lazernyiy-lokator-aeropoisk-zm/
Вертолетный лазерный локатор АЭРОПОИСК–ЗМ.
http://rnd.cnews.ru/news/line/index_science.shtml?2013/04/26/527208
DARPA готовит "всевидящий" лазерный радар.
http://www.popmech.ru/blogs/post/1453-lidar-uhodit-v-proshloe/
Boeing выпускает новую компактную камеру для создания 3D-моделей местности.
Ультразвуковой датчик. Принцип действия
Видео, в котором рассказывается принцип действия ультразвуковго датчика и некоторые популярные их типы.
http://robocraft.ru/blog/electronics/772.html
Ультразвуковой датчик измерения расстояния HC-SR04.
http://home.roboticlab.eu/ru/examples/sensor/ultrasonic_distance
Ультразвуковой датчик расстояния SRF04.
http://www.sensoren.ru/catalogue/ultrazvukovie_datchiki_rasstoyaniya/
Каталог специализированных ультразвуковых датчиков.
http://www.bioaa.info/index.php/2009-12-22-13-06-43/249-2010-04-04-21-45-11.html
Эхолокация у животных.
http://insiderobot.blogspot.com/2008/08/blog-post_24.html
Машинное зрение реальных роботов.
Робот с техническим зрением и голосовым управлением
Видеоматериал по теме технического зрения.
Техническое зрение роботов
Книга "Техническое зрение роботов" дает представление о достижениях визуальной адаптации промышленных роботов.
Как роботы-автомобили Google «видят» мир?
Статья с видеоматериалом о том, какие методы используют в компании Google для определения препятствий.
VD MAIS
Научно-производственная фирма VD MAIS основана в 1993 г. Ведущее направление деятельности фирмы – поставка комплектующих элементов, материалов, оборудования и технологий для разработки и производства современной аппаратуры электронной и электротехнической промышленности, сложных электронных систем.
Платан
ПЛАТАН начал работу на рынке электронных компонентов (ЭК) в 1991 г. и, фактически, был одним из основателей и законодателей этого рынка. За годы работы компания, образовавшаяся из небольшой группы инициативных людей, превратилась в крупнейшего поставщика электронных компонентов, имеющего несколько офисов продаж в Москве, филиалы в Санкт-Петербурге и Киеве, сеть представительств в крупных городах России.
ООО «ГАММА»
Компания ГАММА была основана в 2001 году. Основная деятельность предприятия – оптовая и розничная продажа радиоэлектронных компонентов и сопутствующих товаров. Фирма ООО "ГАММА" имеет офисное и торговое помещение в Днепропетровске и Киеве, имеет представителей в Харькове, Львове, Севастополе, Луганске.
Радиокомплект
Один из крупнейших в Украине поставщиков радиоэлектронной и электротехнической продукции для нужд предприятий разных сфер деятельности, имеет 10-летний опыт работы на отечественном рынке. .
Космодром
Один из крупнейших и известнейших поставщиков электронных компонентов на Украине.
Texas Instruments
Американская компания, производитель полупроводниковых элементов, микросхем, электроники и изделий на их основе.
Analog Devices
Описание.
National Semiconductor
Американский производитель полупроводниковой продукции, который специализировался на аналоговых устройствах и компонентах.
Freescale semiconductor
Американская компания, занимающаяся производством полупроводниковых компонентов. Это одна из первых компаний в этом секторе, появившаяся в 1949 году как подразделение Моторолы. В 2004 году сектор разработки и производства полупроводниковых приборов компании («Motorola Semiconductor») был выделен в отдельную компанию. Freescale занимается производством полупроводниковых компонентов для автомобилей, встраиваемых систем, а также для коммуникационного оборудования.
Fairchild semiconductor
Американская компания, которая в 1959 году впервые в мире создала интегральную схему, пригодную для массового производства, и была одной из ключевых фирм Силиконовой долины в 1960-х годах.
International Rectifier
Американский разработчик и производитель электронных компонентов. Специализируется на изделиях для систем электропитания: силовые транзисторы, импульсные стабилизаторы, микросхемы управления импульсными преобразователями, электродвигателями, люминесцентными лампами и др.
Microchip
Американский производитель микроэлектроники, 8-и, 16-и и 32-битных микроконтроллеров, цифровых сигнальных контроллеров, а также аналоговой и интерфейсной продукции.
Atmel
Atmel Corporation – изготовитель полупроводниковых электронных компонентов, один из лидеров производства микроконтроллеров. Также разрабатывает и производит небольшие модули энергонезависимой памяти для электронных изделий, ПЛИС, цифровые микросхемы-радиоприёмники и передатчики, сканеры отпечатков пальцев.
http://www.donnu.edu.ua/library/
Научно-техническая библиотека Донецкого национального технического университета.
http://www.nbuv.gov.ua/
Национальная библиотека Украины имени В.И. Вернадского, Киев.
http://www.springerlink.com/
Ресурс представляет широкую библиотеку научных статей по различным областям.
http://n-t.org/
Электронный библиотечный фонд «Наука и Техника». Электронный библиотечный фонд представлен разделами: «Текущие публикации» (научно-популярные статьи), «Нобелевские лауреаты» (биографические статьи); «Раритетные издания» (электронные версии редких книг).
АУИСС – Автоматизация управления и интеллектуальные системы и среды
Международная конференция.
Информационные технологии и автоматизация
Всеукраинская научно-практическая конференция.
Фундаментальные и прикладные исследования, разработка и применение высоких технологий в промышленности и экономике
Международная научно-практическая конференция.
Test Automation Days
Выделенная конференция исключительно по автоматизации тестирования ПО, которая делается экспертами для специалистов технических специальностей.
Техническое зрение в системах управления
Научно-техническая конференция.
http://htmlbook.ru/
Справочник HTML и СSS.
http://javascript.ru/tutorial/foundation
Введение в Javascript.
http://easywebscripts.net/jquery/basic.php
Основы jQuery.
http://habrahabr.ru/
Многофункциональный сайт, представляющий собой смешение новостного сайта и коллективного блога, созданный для публикации новостей, аналитических статей, мыслей, связанных с информационными технологиями, бизнесом и Интернетом.
http://flash-book.ru/uchebnik
Учебник Adobe Flash CS4.
http://budy.makegames.ru/
Уроки языка Action Script.
http://sands.at.ua/publ/onlajn_html_uchebnik/1
Онлайн HTML учебник.
Факультет компьютерных информационных технологий и автоматики
Сайт факультета компьютерных информационных технологий и автоматики.
Электронные системы
Кафедра электронных систем, ФКИТА, ДонНТУ.
Сенько Виктор Федорович
Страница доцента кафедры электронные системы и научного руководителя Сенько Виктора Федоровича.
Специализированные сайты, сборники и работы
Сайты поставщиков электронных компонентов
Сайты производителей электронных компонентов
Электронные библиотеки
Сайты конференций
Разное
Отчет об информационном поиске по теме выпускной работы
Представленный отчет позволяет оценить информационную ситуацию по теме магистерской работы. Он является основным документальным подтверждением глубины и полноты информационного поиска, а также служит для фиксации текущей ситуации в исследуемой области.
Поиск выполнен с использованием четырех поисковых систем (Google, Яндекс, Bing, Meta). Результаты сведены в таблицу. Всего произведено 15 запросов, имеющих отношение к магистерской работе. Из них три запроса соответствует названию магистерской работы на трех языках, три запроса с ФИО руководителя, а также девять запросов с ключевыми понятиями по теме магистерской работы.
Ниже приведены две таблицы с отчетами о поиске, которые разделяет временной промежуток чуть более чем в два месяца, а также другой наглядный материал, который позволяет сравнить основные изменения, произошедшие за этот период.
Отчет за 12.03.13 г.
Строка поиска |
||||
На русском языке | ||||
Исследование и обоснование структурной схемы системы распознавания препятствий применительно к конвертоплану |
6 |
185000 |
638 |
1900 |
Сенько Виктор Федорович, ДонНТУ |
100 |
53000 |
6 |
79000 |
Система распознавания препятствий |
2260000 |
874000 |
19900 |
477000 |
Структурная схема |
2130000 |
7000000 |
15000 |
139000 |
Конвертоплан |
64800 |
52000 |
5900 |
1500 |
На украинском языке | ||||
Дослідження та обгрунтування структурної схеми системи розпізнавання перешкод стосовно до конвертоплану |
1 |
64000 |
33 |
0 |
Сєнько Виктор Федорович, ДонНТУ |
54 |
81000 |
1 |
37800 |
Система розпізнавання перешкод |
333000 |
77000 |
2200 |
291000 |
Структурна схема |
210000 |
3000000 |
26300 |
190000 |
Конвертоплан |
64800 |
52000 |
5900 |
1500 |
На английском языке | ||||
Research and study of the block diagram of the system recognition of obstacles in relation to tiltrotor aircraft |
2880 |
2000000 |
9160 |
47 |
Victor Senko, DonNTU |
51 |
68000 |
5 |
63900 |
Obstacles Recognition System |
3280000 |
930000 |
375000 |
233000 |
Block scheme |
125000000 |
4000000 |
5750000 |
75100 |
Tiltrotor aircraft |
325000 |
31000 |
43100 |
2500 |
Отчет за 20.05.13 г.
Строка поиска |
||||
На русском языке | ||||
Исследование и обоснование структурной схемы системы распознавания препятствий применительно к конвертоплану |
9 |
252000 |
614 |
1600 |
Сенько Виктор Федорович, ДонНТУ |
95 |
56000 |
5 |
76500 |
Система распознавания препятствий |
2630000 |
602000 |
20100 |
472000 |
Структурная схема |
1210000 |
8000000 |
19300 |
127000 |
Конвертоплан |
74000 |
90000 |
34000 |
1900 |
На украинском языке | ||||
Дослідження та обгрунтування структурної схеми системи розпізнавання перешкод стосовно до конвертоплану |
1 |
83000 |
35 |
0 |
Сєнько Виктор Федорович, ДонНТУ |
55 |
54000 |
1 |
88500 |
Система розпізнавання перешкод |
301000 |
77000 |
2080 |
329000 |
Структурна схема |
265000 |
3000000 |
26700 |
179000 |
Конвертоплан |
74000 |
90000 |
34000 |
1900 |
На английском языке | ||||
Research and study of the block diagram of the system recognition of obstacles in relation to tiltrotor aircraft |
6450 |
3000000 |
53500 |
66 |
Victor Senko, DonNTU |
53 |
82000 |
9 |
63700 |
Obstacles Recognition System |
3480000 |
1000000 |
481000 |
236000 |
Block scheme |
104000000 |
5000000 |
20700000 |
76100 |
Tiltrotor aircraft |
321000 |
68000 |
72500 |
2300 |
Анализ результатов
В силу различных факторов, невозможно сказать какая поисковая система лучше, а какая нет, но в данном случае отличилась поисковая система Google. Это подтверждается высоким результатом, который был показан по различным запросам. Нельзя не отметить также тот факт, что с течением времени количество найденных страниц по одинаковым запросам изменяется. Это можно объяснить тем, что за период времени между поисками в интернете меняется количество страниц, поисковые системы обновляют базы данных документов, сайтов, которые содержат информацию, связанную с запросами.
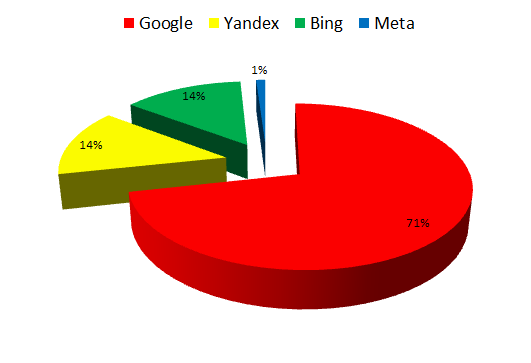
Рисунок 1 – Диаграмма результатов работы поисковых систем
На рисунке 1 представлена диаграмма результатов работы поисковых систем по запросам, которые включают полную информацию по теме магистерской работы. Из диаграммы можно сделать вывод, что поисковая система Google находила больше результатов, чем все остальные почти в 2,5 раза.

Рисунок 2 – Соотношение поисковых результатов по языкам
Количество найденных на английском языке страниц превышает соответствующее значение страниц на русском и украинском языках вместе взятых более чем в 8 раз (Рисунок 2). Это связано с тем, что английский язык – один из наиболее распространенных в мире и Интернете. Также Украина и Россия только начинают вести исследования в области систем автопилотирования, что может объяснять низкую долю найденных сайтов на русском и украинском языках.
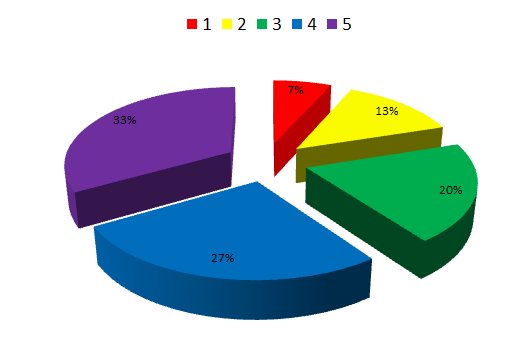
Рисунок 3 – Распределение поисковых результатов на всех языках относительно друг друга
Оценить актуальность поисковых запросов можно на рисунке 3. Номер поискового запроса содержит усредненную сумму результатов найденных страниц между двумя отчетами на трех языках.
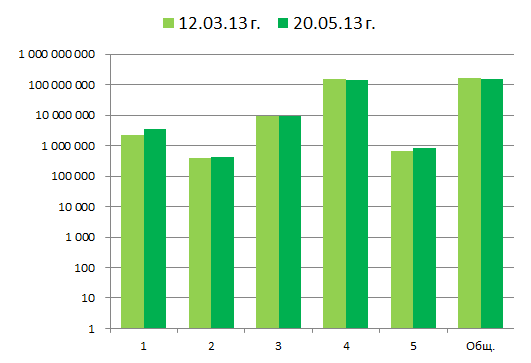
Рисунок 4 – Сравнение количества информации по каждому из запросов
По результатам поиска видно, что количество результатов по 4 поисковому запросу составляет 95% всех поисковых запросов. Связанно это с тем, что он достаточно популярен и затрагивает многие технические области.
Результаты проведенной работы показывают, что тема магистерской работы является актуальной. Исходя из рисунка 4 видно, что за относительно короткий период времени количество информации по данной теме возросло, не считая одного из пяти поисковых запросов, который повлиял на результаты количеством. Так-же при проверке результатов через пол месяца выяснилось, что количество результатов выдвинутых поисковыми системами подвергнуты сезонности.
Мой стиль жизни
Ознакомившись с моим резюме, Вы уже знаете что я увлекаюсь веб-дизайном и созданием сайтов. Да, именно этому сейчас посвящаю большую часть своего времени. Так же некоторые увлечения затрагивают моделирование виртуальных 3D моделей, которые уже можно распечатывать на 3D принтерах (силами энтузиастов, появились достаточно бюджетные модели таких принтеров, что предвещает их скорое внедрение и на отечественный рынок).
Но помимо этого, у меня есть и более активные увлечения, о которых я хочу рассказать. Одно из них – это катание на роликовых коньках. Это просто супер! Я хочу процитировать кусочек из текста, написанный моим знакомым роллером:
«Порою не оглядываясь, их легко можно узнать по побитым коленям и немного сумасшедшему блеску в глазах… Они дети города, старого, не по возрасту суетливого, прародителя. Они дети, научившиеся дышать жизнью, дети, способные добиться своего.
Они постоянно вместе. Но каждый из них умеет ценить одиночество.
Никто из них не способен пропустить приход весны или же первый снег. И каждый хоть раз в жизни бросался в омут с головой.
Они проносятся мимо, заставляя прохожих удивленно поворачиваться вслед. И далеко не каждому из этих случайных встречных знакомо чувство скорости, драйва, эйфории, но каждый из них подсознательно понимает, что потерял что-то удивительное.
Они независимы. Они способны мыслить по-своему, говорить то, что считают нужным и не промалчивать, когда того казалось бы требуют окружающие. Они не делают «скидок своим» и способны отстаивать свою точку зрения до последнего.
Они люди с 8 колесами. Не похожие друг на друга, но еще больше не похожие на простых прохожих. Человек, который хоть на час стал частью этой жизни, не останется равнодушным. У него обязательно появиться альбом с названием типа «ролы» или «жизнь на колесах», его коллеги будут наблюдать рюкзак с ролами возле рабочего стола и слушать не заканчивающиеся истории из роллержизни.
Они пролетят мимо кем-то покинутой тишины, заставляя проснуться остановившийся город, покорят новую высоту, улыбнутся заходящему солнцу… и, закинув ролы в рюкзак, разойдутся… каждый в свою реальность...»


Все действительно так! Стоит только один раз попробовать. Помимо роликов, когда не хватает скорости, пересаживаюсь на велосипед. Хоть эти виды спорта достаточно однотипны, ощущения получаемые от них разные, вполне дополняют друг друга.

На роликовых коньках не хватает скорости, но увеличенная маневренность, малая проходимость по бездорожью, но большая среди большого количества людей. Велосипед же наоборот. Так что тут нет места для спора, все решает желание и ситуация! Можно много писать про свои увлечения, так как их не мало, но не о всех стоит рассказывать в интернете. Я описал основные.
Рекомендуемые ссылки
1. Форум донецких роллеров Отличный портал, правда в силу некоторых обстоятельств, ныне усопший.2. Форум информационного роллер сайта: 4roller.info