

Реферат по теме выпускной работы
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: май 2020 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Практическое значение полученных результатов
- 4. Обзор исследований и разработок
- 4.1 Обзор международных источников
- 4.2 Обзор национальных источников
- 5. Классификация методов обработки и анализа видеоинформации
- 5.1 Обзор методов обнаружение объектов в кадре
- 5.2 Обзор методов сопровождения объектов в кадре
- Выводы
- Список источников
Введение
В настоящее время тенденция к автоматизации набирает все большую скорость. Одной из сфер, в которой автоматизация имеет большие перспективы, является видеоаналитика.
Использование видеоаналитики в ритейле может помочь оценить рекламную стратегию в магазине, а также эффективность размещения проходов и продуктов. Таким образом, становится очень важно разместить информацию о рекламной акции в нужном месте и в нужное время.
Существуют различные аналитические возможности, которые могут помочь розничному магазину получить быстрое представление об эффективности рекламных мероприятий, а также о влиянии динамики потоков покупателей на конверсию в торговых залах.
1. Актуальность темы
На сегодняшний день, основной целью любой торговой сети является максимальное удовлетворение потребителей, что в свою очередь ведёт к максимизации прибыли предприятия. Для достижения поставленной цели, прежде всего необходимо изучить модель поведения покупателей в торговом зале, их привычки, потребности, восприятие. Для дальнейшего понимания исследования предметной области, необходимо вести понятие – покупательский поток, и дать ему определение.
Поток покупателей (покупательский поток) – это направление по которому проходит большинство покупателей в магазине.
Очень многие сегодня сталкиваются с проблемами привлечения покупательских потоков в торговом зале, это может быть связано с непривлекательной выкладкой товара, либо с неправильным графиком работы персонала, неправильным размещением оборудования торгового зала, которое не позволяет пройти покупателям к какому – либо отделу и т.д.
Владельцу торговой точки, крайне необходимо иметь представление о посещаемости заведения, так как именно данная информация позволит узнать пиковые часы, дни, недели, что в свою очередь позволит сформировать удобный график работы рабочего персонала. Существует также ряд дополнительных данных, которые могут быть получены при анализе распределения потоков покупателей, например тепловые карты – позволяют определять зоны активности (отделы, вызывающие наибольшую заинтересованность у посетителей), мертвые зоны (отделы которые совсем не привлекают своим товаром) и узкие места, это позволит понять, где лучше всего размещать объявления и рекламные акции. Карты траекторий – показывают наиболее популярные маршруты передвижения посетителей по торговому залу и т.д.
Таким образом основная цель контроля посещаемости – это непрерывный поиск рычагов, чтобы эта посещаемость росла или хотя бы не падала. На сегодняшний день заказчиков все больше интересуют технологические инструменты для привлечения и удержания клиентов.
Неотъемлемой частью структуры торгового центра является система видеонаблюдения для обеспечения безопасности. Если использовать имеющиеся аппаратные средства таких систем, то существует перспектива преобразования обычной системы наблюдения в интеллектуальную систему с функциями статистического анализа.
На данный момент времени самая прогрессивная технология получения статистических данных поведения посетителей в розничном магазине основана на видеоанализе.
Современные системы анализа распределения потоков покупателей имеют ряд преимуществ, например, высокую скорость обработки, точность подсчета и т.д. Однако, они по-прежнему являются не надежными, так как в открытом доступе отсутствуют методы и алгоритмы с помощью которых была реализована задача, достаточно дорогостоящими и имеют ограниченную функциональность.
Магистерская работа посвящена актуальной научной задаче анализа распределения потоков покупателей на основе видеоинформации, направленного на повышение эффективности и дальнейшей оптимизации работы торгового зала.
2. Цель и задачи исследования, планируемые результаты
Целью проводимых исследований является повышения эффективности работы торгового зала за счёт применения современных методов и алгоритмов обнаружения и сопровождения объектов видеопоследовательности.
Для достижения поставленной цели необходимо выполнить следующие задачи:
- Ознакомится с влиянием динамики потоков покупателей на конверсию в торговых залах.
- Провести анализ и сравнение существующих методов и алгоритмов обнаружения, сопровождения объектов видеопоследовательности.
- Выполнить структурно-алгоритмический анализ программных средств.
- Разработать усовершенствованный алгоритм определения объектов видеопотока.
- Модифицировать алгоритм сопровождения объектов интереса системы.
- Провести экспериментальные исследования эффективности разработанных алгоритмов.
- Разработать компьютеризированную систему для анализа распределения потоков покупателей на основе видеоинформации.
Объектом исследования является процесс анализа распределения потоков покупателей в торговом зале.
Предметом исследования является объединение методов и алгоритмов обнаружения и сопровождения объектов видеопоследовательности.
В рамках магистерской работы планируется получение актуальных научных результатов по следующим направлениям:
- Разработка модицифированного алгоритма сопровождения объектов интереса системы.
- Усовершенствованние метода обнаружения объектов видеопоследовательности и оценка эффективности его применения.
3. Практическое значение полученных результатов
Разработанную компьютеризированную систему, возможно использовать в центрах розничной торговли для анализа распределения потоков покупателей, с целью повышения эффективности работы торговых залов, а также при некоторой модификации можно будет использовать и в других организациях (рестораны, кинотеатры и т.д.)
Использования разработанного приложения позволит:
- Обеспечить точный подсчет посетителей в торговой точке, оценить посещаемость магазина выявив часы пиковой нагрузки, что в свою очередь поможет эффективно распределить работу персонала (оптимизировать трудозатраты).
- Определить значения базового показателя эффективности торговой точки – конверсии продаж, которая показывает отношение количества посетителей торговой точки по отношению к числу транзакций (покупок).
- Выявлять те места в магазине, в которых люди проявляют наибольшую активность.
- Анализировать перемещения потоков покупателей внутри магазина.
- Определить малопосещаемые зоны, в следствии чего переставить товары, не пользующиеся спросом в так называемые
горячие зоны
, то есть наиболее популярные места посещений торговой точки.
4. Обзор исследований и разработок
Обнаружение и отслеживание объектов видеопоследовательности приобрело значительный интерес в последние два десятилетия. Повышенный интерес обусловлен наличием качественных недорогих камер видеонаблюдения и необходимостью автоматизированного видеоанализа. Распознавание действий человека в реальных условиях находит применение в интеллектуальном видеонаблюдении, анализе поведения покупателей, национальной безопасности, профилактике преступности и многое другое [1].
Наряду с этим в данном разделе будет представлен обзор самых последних исследований в области компьютерного зрения, в частности детектирования и сопровождения объектов интереса видеопоследовательности с помощью самых различных методик и алгоритмов как американскими, европейскими, китайскими учеными, так и отечественными специалистами.
4.1 Обзор международных источников
На данный момент времени выпускается огромное количество публикаций и соответствующих исследований в области компьютерного зрения. Существует большое количество классических методов классификации и обнаружения. В основном эти методы заключаются в выделении на изображениях неких особенностей (особых точек) или локальных регионов, которые будут характеризовать картинку. С данной задаче могу справиться например такие методы, как SVM, HOG/SIFT.
Однако на сегодняшний день существуют более усовершенствованные методы, например нейронные сети, которые сами обнаруживают объект и возвращают предсказание, то есть метку класса к которому принадлежит объект.
В этой связи прежде всего стоит отметить применение нейросетей в компьютерном зрении, которое было освещено в СМИ еще в 1983, по распознавание рукописных цифр, реализованное Яном ЛеКуном [2]. Это была первая свёрточная нейросеть для классификации. Ее основное достоинство было в том, что она стала использовать convolution и pooling операции.
Однако развитие не стояло на месте и в 2012 году появилась AlexNet, которая участвовала в соревнованиях ILSVRC (ImageNet Large-Scale Visual Recognition Challenge). В работе Raghav Prabhu [3] представлен обзор архитектур которые были первыми на соревнованиях ILSVRC(ImageNet Large-Scale Visual Recognition Challenge) с 2010 до 2016 года.
Следующим шагом к пониманию того что происходит внутри сверточных нейронных сетей, стала статья [4], в которой авторы предложили способы визуализации того на какие части картинки реагируют нейроны в разных слоях (CNN). Авторы показали что первые слои свёрточной сети реагируют на «низкоуровневые вещи» (края/углы/лини), а последние слои реагируют уже на целые части изображений, то есть уже несут в себе некоторую семантику.
В 2018 г. группа учённых Li Liu ,Wanli Ouyang, Xiaogang Wang, Paul Fieguth, Jie Chen, Xinwang Liu, Matti Pietikainen из Китая, Канады и Финляндии представила совместную публикации направленную на исследование применения глубокого обучения в области компьютерного зрения, в публикации рассказывается о различных архитектурах нейронных сетей, проводятся эксперементальные исследования оценки качества данных сетей, рассматриваются проблемы детектирования, датасеты на которых проводятся исследования и многое другое [5].
Помимо классификации изображений и обнаружений объектов на видео, отдельное внимание стоит уделить ре-идентификации. Классические методы описаны в работе [6], авторы знакомит с историей повторной идентификации личности и ее взаимосвязью с классификацией изображений и поиском экземпляров, исследуют широкий выбор созданных вручную систем и крупномасштабных методов для повторной идентификации на основе изображений и видео, описывают будущие направления в сквозной повторной идентификации и быстрого поиска в больших галереях, а также кратко излагаются некоторые важные, но недостаточно разработанные вопросы. Еще одна работа повтороному отслеживанию представлена группой авторов на Международная конференция по анализу и распознаванию изображений (ICIAR 2019)[7]. Авторами рассматривается вопрос многокамерного отслеживания нескольких людей – алгоритм реидентификации (повторной идентификации) человека, который распознает и сохраняет идентификаторы всех обнаруженных неизвестных людей во всем видеопотоке.
Сопровождение людей в видеопоследовательности освещено в работах Nicolai Wojke, Alex Bewley, Dietrich Paulus [8] и Alex Bewley, Zongyuan Ge, Lionel Ott, Fabio Ramos, Ben Upcroft [9]. В последней работе был предложен один из первых real-time трекеров – Simple Online and Realtime Traker (SORT), который является надёженым и умеет справляться со сложными ситуациями, опубликован был в 2016 году. В 2017 году вышла модификация SORT'а в виде DeepSORT [10]. DeepSORT стал применять нейросеть для извлечения визуальных признаков, используя их для разрешения коллизий. На сегодняшний день считается одним из лучших онлайн-трекеров.
4.2 Обзор национальных источников
Задачей отслеживания объектов в видеопотоке активно занимаются в Московском государственном техническом университете им. Баумана, наряду с этим были выделены следующие работы в области компьютерного зрения, в частности отслеживания объектов.
Публикация К.Л. Тассова и Д.Е. Бекасова посвящена проблеме перекрытий объектов в видеопотоке [11].
В статье представлено описание задачи отслеживания объектов в видеопотоке, введены основные понятия проблемной области, освещены типовые решения задачи.
В работе [12] А.Н. Алфимцевым, Н.А. Деминым предложен интегральный алгоритм, использующий возможности алгоритма Лукаса – Канаде и алгоритма Виолы – Джонса
для захвата и отслеживания удаленного объекта. Также можно отметить работу группы аторов И.И. Лычкова, А.Н. Алфимцева, В.В. Девяткова – Отслеживание движущихся объектов для мониторинга транспортного потока
[13] .
Применение сверточных нейронных сетей для детектирования объектов на изображениях подробно освещено в работах А.П. Береснева, И.В. Зоева, Н.Г. Маркова (Томский политехнический университет) [14] и Н.С. Артамонова, П.Ю. Якимова (Самарский национальный исследовательский университет им. академика С.П. Королева) [15].
В Санкт-Петербургском государственном университете телекоммуникаций им. проф. М.А. Бонч-Бруевича была предложена интеллектуальная система по обнаружению людей в пешеходной зоне. Создан прототип на платформе микрокомпьютера Raspberry Pi 3, для того чтобы показать, что данные системы возможно разворачивать не только на мощных вычислительных кластерах, но и на конечных устройствах [16].
5. Классификация методов обработки и анализа видеоинформации
Под задачей детектирования объектов в видео понимается поиск положения всех объектов, представляющих интерес. Положение объекта можно представлять по-разному, например, как множество пикселей, соответствующих объекту, либо как координаты прямоугольника окаймляющих объект. В данной работе на выходе алгоритма детектирования необходимо получить множество окаймляющих прямоугольников.
Когда детекция людей производится на каждом изображении с камеры, то можно посчитать их количество на одном кадре, но на двух – уже нет, так как мы не сможем сказать, где какой именно человек. В таком случае необходим алгоритм, который позволил бы считать именно уникальных людей в видеопотоке. Таковым может быть алгоритм ре-идентификации, о котором упоминалось выше, но когда речь идет про видео и детекцию, то зачастую используют алгоритмы трекинга объектов интереса.
Когда выполняется отслеживание объекта, который был обнаружен в предыдущем кадре, мы много знаете о внешнем виде объекта, о местоположении в предыдущем кадре, направлении и скорости его движения. Таким образом, в следующем кадре имеется воможность использовать всю эту информацию, чтобы предсказать местоположение объекта в новом кадре и выполнить небольшой поиск ожидаемого местоположения. Основное преимущество использования трекинга, это то что он выполняется быстрее чем обнаружение. Так как алгоритмы отслеживания также могут накапливать ошибки, например терять ограничивающий прямоугольник, то при проектировании эффективных систем обычно обнаружение объектов выполняется на каждом n-м кадр, в то время как алгоритм отслеживания используется в n-1 кадрах между ними.
Таким образом основные этапы обработки видеоданных для решения задачи анализа распределения потоков покупателей можно представить следующим образом (рисунок 1). Входной информацией для такой системы является видеопоток. Из него выделяется последовательность кадров, к каждому из которых применяются методы предварительной обработки изображений, а также алгоритм детектирования фигур людей. Затем с помощью специальных методов трекинга производится отслеживание выделенных фигур и строится траектория передвижений. В результате анализа поведения посетителей будут получены такие статистические данные, как наиболее и наименее популярные часы посещения торговой точки, популярность того или иного отдела, маршруты передвижений по торговому залу и т.д.

Рисунок 1 – Обобщенная схема работы системы анализа распределения потоков покупателей
5.1 Обзор методов обнаружение объектов в кадре
Для решения задачи детектирования объектов видеопослеовательности существует множество различных подходов, а именно: поиск объекта, сегментация изображения, методы вычитания фона и многие другие. В данном разделе будет дан краткий сравнительный анализ наиболее популярных и перспективных на сегодняшней день подходов в области компьютерного зрения для задачи детектирования. Ниже представлен пример выделения объектов интереса видеопоследовательности [17].
Рисунок 2 – Детектирование объектов видеопоследовательности
(анимация: 10 кадров,
цикл повторений: бесконечно, размер: 181 килобайт)
Методы, основанные на извлечении признаков
Один из возможных подходов к решению задачи детектирования состоит в том, чтобы использовать алгоритмы машинного обучения для построения моделей классов объектов и алгоритмы вывода для поиска объектов на изображении [18].
Построение модели состоит из двух этапов(рисунок 3):
- Извлечение признаков, характерных для объектов класса – построение характеристических векторов-признаков для ключевых точек объекта (углов, ребер или контуров объектов ) или для всего объекта.
- Тренировка модели на полученных признаках для последующего распознавания объектов.
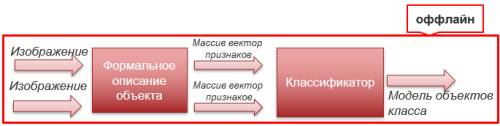
Рисунок 3 – Схема построения модели класса с использованием методов, основанных на извлечении характерных признаков
Алгоритм вывода (поиска) по существу включает два этапа:
- Извлечение признаков объекта из тестового изображения.
- Поиск объектов на изображении (рисунок 4). Входными данными алгоритма поиска являются формальное описание объекта – набор признаков, которые выделены из тестового изображения – и модель класса объектов. На основании этой информации классификатор принимает решение о принадлежности объекта классу. Некоторые методы поиска также оценивают степень достоверности того, что объект принадлежит рассматриваемому классу.

Рисунок 4 – Схема поиска объектов с использованием методов, основанных на извлечении характерных признаков
Среди наиболее популярных методов данной группы можно выделить следующие: метод Виолы-Джонса, главных компонент, HOG-детектор.
Методы поиска по шаблону
Детектирование объектов на основании некоторого шаблона предполагает, что имеется изображение объекта с выделенными признаками – шаблон – и тестовое изображение, которое сопоставляется этому шаблону.
Результатом такого сопоставления (matching) является мера сходства (рисунок 5). Считается, что если эта мера больше некоторого порога, то тестовое изображение – это изображение объекта.

Рисунок 5 – Схема решения задачи детектирования объектов с использованием методов поиска объектов по шаблону
Необходимо отметить, что методы детектирования по заданному шаблону эффективно работают при поиске одиночных объектов. При возникновении перекрытий в бегущем окне
исчезают некоторые признаки в описании. Поэтому при сопоставлении окна шаблону вводится порог, по которому отсекаются неперспективные окна заведомо не содержащие объектов [18].
Нейросетевые методы
Существует огромное количество архитектур неройнных сетей, в публикации Введение в архитектуры нейронных сетей
[20] дается базовое понимание и терминология в данной области, среди наиболее популярных рассматриваются сети прямого распространения (FNN), рекурентные нейронные сети (RNN) к ним относятся сети
(LSTM) и (GRU) и многие другие. В задачах классификации и детекции
объектов следует подробнее остановится на сверточной нейронной сети (CNN) – это специальная архитектура нейронных сетей предложенная Яном Лекуном.
Сверточные нейросети решают три основные задачи [20]:
- Классификация – задача классификации по отношению к изображениям заключается в присвоении метки целому изображению.
- Детекция – подразумевает не просто определение к какому классу принадлежит объект на изображении, а также находит Bounding Box – место, где конкретно находится объект на изображении.
- Сегментация – подразумевает попиксельное выделение каждого объекта на изображении.
Пример каждой задачи представлен на рисунке 6.
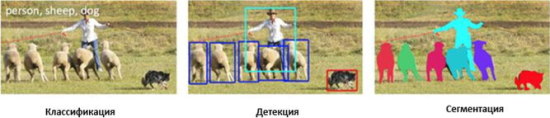
Рисунок 6 – Основные задачи CNN
Основными видами слоев в сверточной нейронной сети являются (рисунок 7):
- сверточные слои (convolution layer);
- пулинговые слои (pooling layer);
- полносвязные слои (fully-connected layer).
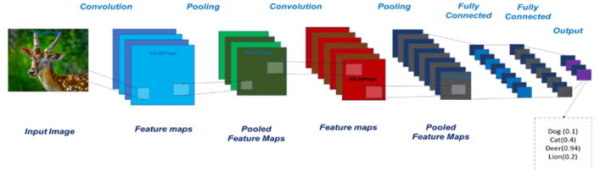
Рисунок 7 – Архитектура сверточных нейронных сетей
Основной особенностью нейронных сетей является их обучаемость на наборе готовых примеров заранее занесенных в базу данных. В процессе обучения, сеть автоматически извлекает ключевые признаки и строит взаимосвязь между ними. После этого, для распознавания неизвестного объекта, нейронная сеть применяет полученный опыт.
Основным достоинством можно выделить высокую точность обнаружения при правильном подборе архитектуры и настройке параметров сети. Основная проблема применения моделей глубокого обучения нейронных сетей является чрезвычайно высокая вычислительная стоимость, особенно когда речь идет об обработке видеопотока
[19].
Анализ методов детектирования объектов в кадре
Для того, чтобы выяснить целесообразность применения вышеописанных методов в системе анализа распределения потоков покупателей, было произведено сравнение методов детектирования.
Анализ методов детектирования проводился по следующим критериям:
- точность;
- скорость;
- обучение – возможность обучения или настройки параметров под определенный класс;
- многоклассовое детектирование – возможность определения нескольких классов объектов;
- гибкость распознавания – возможность определения необходимых классов объектов в условиях, не рассматриваемых ранее (шум, изменение фона, масштаба и т.д.).
| Группа методов | Критерий оценивания | ||||
|---|---|---|---|---|---|
| Точность | Скорость | Обучение | Многоклассовое детектирование | Гибкость распознавания | |
| Методы поиска по шаблону | + | + | − | − | − |
| Нейронные сети | ++ | − | ++ | ++ | + |
| Методы основанные на извлечении признаков | ++ | − | + | + | − |
Примечание: количеством знаков +
отмечается степень различия для критерия, знаком −
– возможность не предусмотрена, либо качество минимально.
5.2 Обзор методов сопровождения объектов в кадре
Сопровождение (трекинг) движущихся объектов – это создание траектории объекта во времени путем локализации его позиции в каждом кадре видео. Входными данными любого алгоритма сопровождения является последовательность изображений (кадров видео) I1, I2,..., In c нарастающим объемом информации, которую необходимо обрабатывать и анализировать.
Задача сопровождения состоит в том, чтобы построить траектории движения целевых объектов на входной последовательности кадров.
Допустим, что положение объекта на изображении с номером обозначается Pk.
Тогда траекторией движения объекта называется последовательность его положений Ps, Ps+1,..., Ps+l-1
где s – номер первого кадра, на котором был обнаружен объект, l – количество кадров последовательности, где наблюдается объект.
Обзор методов трекинга объектов в кадре
В системах видеонаблюдения применяются различные методы и алгоритмы для отслеживания траектории объекта. Классифицировать их можно по разным признакам: по представлению объекта для трекинга, по используемым особенностям изображения, по способу моделирования движения, по внешнему виду и форме объекта. Далее представлены основные алгоритмы трекинга объектов на видеоизображении.
Шаблонов движений (Motion Templates) – основан на поиске границ объектов в каждом кадре видеопотока It (h, w). Смещение границы на новом кадре It+1(h, w) относительно предыдущего задает вектор движения объекта. Данный алгоритм наиболее эффективен при движении крупных объектов и часто используется для распознавания динамических жестов в человеко-машинных интерфейсах.
Алгоритм Лукаса – Канаде (Lucas – Kanade) – основан на дифференциальном вычислении оптического потока с помощью анализа пикселей (предполагается, что оптический поток одинаков для пикселей, лежащих в окрестности центра окна слежения), при этом смещение пикселей между соседними кадрами It (h, w) должно быть невелико.
Метод сдвига среднего (Mean-Shift) – основан на математической модели, которая заключается в том, что вычисляется локальный экстремум плотности распределения набора характерных точек, т. е. алгоритм отслеживает смещение центра масс точек, определяющих объект слежения, получая на выходе вектор движения объекта.
Метод непрерывно адаптирующегося сдвига (CamShift) – основан на алгоритме сдвига среднего, но отличается тем, что автоматически подстраивает границы и размер окна, в пределах которого расположены характерные точки. Таким образом производится более точное отслеживание объекта, изменяющегося в размерах;
Фильтр Кальмана – позволяет получить вероятные положения найденных ранее объектов в новом кадре на основе истории его предыдущих положений. Алгоритм состоит из двух повторяющихся фаз: фаза экстраполяции и фаза коррекции. В процессе работы первой фазы происходит предсказание (экстраполяция) значения переменных состояния на основе оценки состояния предыдущего шага. Вторая фаза отвечает за уточнение результата экстраполяции при помощи соответствующих измерений.
Анализ методов трекинга объектов в кадре
Рассмотренные выше алгоритмы были проверены на устойчивость под влиянием различных негативных параметров [12]. Результаты проверки приведены в таблице 2.
| Алгоритм | Негативный параметр | |||
|---|---|---|---|---|
| Объект движется очень быстро | Объект мало отличим по фону | Подвижный фон | Размеры объекта меняются со временем | |
| Шаблон движения | − | + | − | + |
| Сдвиг среднего | − | − | + | − |
| Лукаса-Канаде | − | + | + | − |
| Непрерывно адаптирующийся сдвиг | − | − | + | + |
| Фильтр Кальмана | − | − | − | − |
Примечание: знаком +
отмечается влияние параметра на работу метода, знаком −
– отсутствие влияния на работы соответствующего алгоритма.
Выводы
На данном этапе выполнения магистерской работы был проведён анализ влияния динамики потоков покупателей на конверсию в торговых залах. Определены такие направления в решении поставленной задачи, как локализация объектов, а также их дальнейшее сопровождение. Проанализированы основные алгоритмы обнаружения и сопровождения людей в видеопотоке.
В результате сравнения методов видеодетектирования, были сделаны следующие выводы: методы поиска по шаблонам крайне чувствительны к входным данным и их изменениям. Таким образом, они могут эффективно работать только при определенных, жестко фиксированных условиях. Методы основанные на извлечении признаков и нейронные сети могут обучаться под определенные классы объектов, что увеличивает точность обнаружения и позволяет классифицировать объекты по нескольким классам. В результате сравнительного анализа различных методов поиска объектов для реализации задачи детектирования, было принято решение использовать нейросетевые методы обработки видеоданных. Данное решение обусловлено высокой точностью выбранных методов.
Анализ методов отслеживания объектов показал, что в настоящее время остро стоит проблема обеспечения непрерывного трекинга. Большинство существующих систем трекинга не поддерживают данный функционал, либо пытаются решить проблему путем выбора ракурса, при котором вероятность перекрытия минимальна.
Среди рассмотренных методов трекинга объектов видеопоследовательности можно выделить фильтр Калмана, являющийся наиболее популярным алгоритмом для отслеживания и прогнозирования текущих и будущих позиций. Основной особенностью данного алгоритма является то что, он позволяет отслеживать траекторию объекта даже в том случае, когда он не был распознан на нескольких кадрах подряд по той или иной причине.
Список источников
- Debaditya Acharya, Kourosh Khoshelham, Stephan Winter Real-time detection and tracking of pedestrians in CCTV images using a deep convolutional neural network/ Conference: Proc. of the 4th Annual Conference of Research@Locate, At Sydney, Australia, Volume: 1913/Infrastructure Engineering, The University of Melbourne/April 2017, 31-36
- Y.Le Cunn, B.Boser ,J.S. Denker, D.Henderson, R.E.Howard, W.Hubbard and L.D.Jackel Handwritten Digit Recognition with a Back-Propagation Network / [Электронный ресурс]. – Режим доступа: [Ссылка].
- Raghav Prabhu CNN Architectures — LeNet, AlexNet, VGG, GoogLeNet and ResNet [Электронный ресурс]. – Режим доступа: [Ссылка].
- Matthew D Zeiler, Rob Fergus Visualizing and Understanding Convolutional Networks / Dept. of Computer Science, Courant Institute, New York University [Ссылка]
- Li Liu ,Wanli Ouyang, Xiaogang Wang, Paul Fieguth, Jie Chen, Xinwang Liu, Matti Pietikainen Deep Learning for Generic Object Detection: A Survey
- Liang Zheng, Yi Yang, Alexander G. Hauptmann Person Re-identification: Past, Present and Future [Электронный ресурс]. – Режим доступа: [Ссылка].
- Mohammadreza Baharani, Shrey Mohan Hamed Tabkhi:Real-Time Person Re-identification at the Edge: A Mixed Precision Approach /International Conference on Image Analysis and Recognition (ICIAR 2019), pp.27-39 (2019)
- Nicolai Wojke, Alex Bewley, Dietrich Paulus: Simple Online and Realtime Tracking with a Deep Association Metric / University of Koblenz-Landau, Queensland University of Technology (2017)
- Alex Bewley, Zongyuan Ge, Lionel Ott, Fabio Ramos, Ben Upcroft SIMPLE ONLINE AND REALTIME TRACKING/Queensland University of Technology, University of Sydney (2017)
- Nicolai Wojke, Alex Bewley, Dietrich Paulus Simple Online and Realtime Tracking with a Deep Association Metric [Электронный ресурс]. – Режим доступа: [Ссылка].
- Тассов К.Л., Бекасов Д.Е. Обработка перекрытий в задачах отслеживания объектов в видеопотоке. Инженерный журнал: наука и инновации, 2013, вып. 6. – Режим доступа: [Ссылка].
- Алфимцев А.Н., Демин Н.А. Захват и отслеживание удаленных объектов в видеопотоке. Инженерный журнал: наука и инновации, 2013, вып. 11. Режим доступа: [Ссылка].
- Девятков В.В., Алфимцев А.Н. Отслеживание движущихся объектов для мониторинга транспортного потока / Труды 34-й Конференции «Информационные технологии и системы» (Геленджик, 2011). Геленджик: ИППИ им. А.А. Харкевича РАН, 2011. С. 31-36.
- Берсенев А.П., Зоев И.В., Марков Н.Г. Исследование свёрточных нейронных сетей класса YOLO для мобильных систем детектирования объектов на изображениях. Труды международной конференции по компьютерной графики и зрению "Графикон", вып.28, 2018. - 196-199 с.
- Н.С. Артамонов, П.Ю. Якимов Классификация дорожных знаков при помощи YOLO CNN на мобильной платформе NVIDIA Jetson / IV Международная конференция и молодёжная школа «Информационные технологии и нанотехнологии» (ИТНТ-2018) Самара, 24-27 апреля 2018 г. - 2328-2334 с.
- Яскеляйнен Я.С., Хакимов А.А., Мутанна М. С.А., Мутханна А.С.А., Киричёк Р.В. Разработка системы распознавания пешеходов в режиме реального времени для ее применения в концепции Умного города // Информационные технологии и телекоммуникации. Санкт-Петербург: СПбГУТ, 2018. Том 6. № 3. С. 123–136.
- Илья Захаркин Вижу, значит существую: обзор Deep Learning в Computer Vision (часть 2) [Электронный ресурс]. – Режим доступа: [Ссылка].
- Конспект лекций НОУ ИНТУИТ / Задача детектирования объектов на изображениях и методы ее решения [Электронный ресурс]. – Режим доступа: [Ссылка].
- Велиева А.А., Мартыненко Т.В. Анализ методов детектирования и сопровождения потоков покупателей на основе видеоинформации // Мир компьютерных технологий: Сборник статей всероссийской научно-технической конференции студентов, аспирантов и молодых ученых – г. Севастополь: СевГУ, 2019. – с.82-86,
- Григорий Сапунов Введение в архитектуры нейронных сетей [Электронный ресурс]. – Режим доступа: [Ссылка].