
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обоснование режима пуска ленточного конвейера
- 4. Обоснование режима торможения ленточного конвейера
- Выводы
- Список источников
Введение
Главную роль в хозяйстве нашей страны играет промышленность. Украина имеет возможность для развития всех отраслей промышленности. В данный момент работает 9940 предприятий. Доля промышленности в экономике страны составляет 42%. Угольная промышленность Украины - это мощный многофункциональный производственный комплекс со значительными объемами производства и услуг, многогранным характером деятельности, сложными внутренними и внешними связями, специфическими условиями работы, как предприятий, так и работников. В настоящее время в области функционируют 19 государственных холдинговых компаний, 8 производственных объединений по добыче угля, 10 самостоятельных шахт специализированные холдинговые компании и государственные открытые акционерные общества по обогащению угля, геологической разведке, бурению скважин, по ремонту оборудования, автоматизации, свя связи, строительству шахт и разрезов; крупные заводы угольного машиностроения, другие предприятия и организации. Очевидно, что в такой большой инфраструктуре огромное значение имеет качество и своевременность транспортных и логистических операций, которые, в свою очередь, зависит от надежности транспортных машин. Наиболее высокопроизводительным типу транспортных машин являются машины непрерывного действия, в частности ленточные и скребковые конвейеры. Они широко используются в угольной промышленности, где полная или частичная конвейеризация крупных шахт обеспечивает интенсивное ведение горных работ и увеличивает производительность труда
1. Актуальность темы
Ленточный конвейер является наиболее распространенным типом транспортирующих машин, он служит для перемещения насыпных или штучных грузов. Применяется на промышленных производствах, в рудниках и шахтах, в сельском хозяйстве. Груз перемещается по ленте в горизонтальной плоскости или под углом до 90 ° к горизонту, от которых зависит динамические характеристики пуска и торможения ленточного конвейера. Пуск конвейеров из-за больших инерционных масс и статических нагрузок отличается значительной продолжительностью и сопровождается существенным нагревом двигателей. Перегрузка конвейера, пониженное напряжение питания, некоторые виды неисправности в механическом и электрическом оборудовании могут приводить к дополнительному затягиванию процесса пуска и вследствие этого к недопустимому превышению температуры двигателя. Кроме того, перегрузки ленточных конвейеров может привести к пробуксовке тягового элемента на приводном органе При этом закончился процесс пуска двигателя не выводит конвейер на рабочую скорость, а длительное буксования приводит к порче тягового элемента, поэтому во всех случаях длительного пуска конвейера более регламентированного времени привод необходимо отключить . Поэтому, для экономии электроэнергии, времени пуска и, сохранения привода и ленты рассматривается эта тема.
2. Цель и задачи исследования, планируемые результаты
Цель работы - построить и рассчитать математическую модель при пуске или торможении ленточного конвейера.
Основные задачи исследования:
- Обосновать пусковые режимы ленточного конвейера
- обоснование торможения ленточного конвейера.
- построить математическую модель для расчета режимов пуска и торможения.
Объект исследования: Ленточный конвейер.
Предмет исследования: Динамические процессы при пуске и торможению ленточного конвейера
В рамках магистерской работы планируется получение актуальных научных результатов по следующим направлениям:
- Получить и рассчитать математическую модель динамических процессов при пуске ленточного конвейера.
- Получить и рассчитать математическую модель динамических процессов при торможении ленточного конвейера.
3. Обоснование режима пуска ленточного конвейера
Моделирование процессов пуска ленточных конвейеров сводится к замене непрерывной модели на дискретную, в которой связи между точечными массами заменяются упругими и диссипативными связями. В результате, модель описывается системой обыкновенных дифференциальных уравнений с соответствующими начальными и граничными условиями. Решение полученной системы - в общем случае нелинейных обыкновенных дифференциальных уравнений - представляет также большие трудности. Поэтому в задачах оптимального управления пуском ленточного конвейера такая модель не имеет практического применения. Для решения задач пуска применялся метод преобразования Лапласа. В результате, найдены решения задач пуска ленточного конвейера для линейных характеристик двигателя. Однако, в общем случае для нелинейных и разрывных характеристик двигателя этот метод не применим. Итак, в настоящее время не существует адекватной математической модели динамических процессов пуска ленточных конвейеров с нелинейными и разрывными характеристиками двигателей. Для моделирования процессов пуска ленточного конвейера пользуется метод припасовки (сшивки). Сущность метода припасовки состоит в том, что дифференциальное уравнение, описывающие динамический процесс, решается в общем выгладит для каждой отдельной линейного участка апроксимувальнои характеристики двигателя. Затем, по заданным начальным и граничным условиям, является решением дифференциального уравнения процесса для предварительной линейного участка апроксимувальнои характеристики двигателя, находятся произвольные константы решение дифференциального уравнения процесса для дальнейшей линейного участка характеристики двигателя. Так последовательно находятся решения для всех линейных участков апроксимувальнои характеристики двигателя.

Рис.3.1 - Ленточный конвейер
Система диференциальних уравнений, описывающие динамические процессы пуска ленточного конвейера, имеет вид:

При начальных условиях n = 0:
Vг (E, 0) = Vx (E, 0) = 0; Wг (E, 0) = Wx (E, 0) = 0
где Wг (E, n), Wx (E, n) - динамические составляющие натяжений на грузовой и холостой ветвях ленты конвейера соответственно, Н; Vг (Е,n), Vx (E,n) - скорости точек грузовой и холостой ветвях ленты конвейера соответственно, м / с;E,n - Соответственно безразмерные координаты и время, а - скорость распространения упругих возмущений в ленте, м / с; Е - агрегатная жесткость ленты при ее растяжении, Н;p - Эквивалентная погонная плотность ленты, кг / м (p = Е / а ^ 2).
Безразмерные координаты и безразмерное время определяется по формулам:
E = х / L; n = at / L
где х - координата, направленная вдоль ленты в направлении главного барабана, с центром на оси хвостового барабана конвейера, м; t - текущее время, с; L - длина контура ленты конвейера, г.
Граничные условия на хвостовом и приводном барабанах зависят от типа натяжного устройства.
Для жесткого зажима в силу условия неразрывности ленты имеем:
на хвостовом барабане: при E = в
Vг (0, n) =-Vx (0, n), Wг (0, n) =-Wx (0, n)
на приводном барабане при: E = 1/2
Vг (1/2,) =-Vx (1/2, n)
Wг (1/2,)-Wx (1/2, n) = F (V г) - G1 - (a * m / L) * dV / dn
где F (V г) - пусковая характеристика привода в координатах F, V, Н; G1 - сила сопротивления движению ленты и груза, включает скочующуся силу от веса груза и ленты конвейера, Н; m - приведенная масса груза вращающихся частей привода ленточного конвейера, кг.
При этом пусковая характеристика двигателя апроксимировалась кусочно-линейным сплайном, который можно представить в виде
 - единичная функция Хевисайда; n - количество линейных участков характеристики.
</P>
<p><div class=img>
<img src='images/Starting_characteristics.gif' alt=)
Рис.3.2 - Пусковая характеристика привода
Согласно методу подгонки, получим решение системы дифференциальных уравнений для i-й линейного участка апроксимовуванои характеристики двигателя.
Итак, вычислив скорость ленты на приводном барабане, подставляя эти значения, получим скорость и динамическое усилие в любой точке ленты конвейера.
4. Обоснование режима торможения ленточного конвейера
Экстремальные натяжения ленты и худшие условия по сцеплению на приводных (тормозных) барабанах могут иметь место при торможении конвейера. Это относится прежде всего к наклонным конвейерам с отрицательным перепадом высот между конечными барабанами (в шахтах это бремсберговых конвейеров). Если привод конвейера и тормозное устройство расположены в головной части конвейера, то при торможении конвейера от привода по верхней загруженной ветке конвейера начинает распространяться прямая волна, которая уменьшает начальное натяжение установившегося режима. В конвейере с жестким натяжным устройством но нижней ветви распространяется прямая волна динамического растяжения, если на конвейере установлен податливое зажимы (см. рис.1, б), то эта волна отсутствует и каретка зажима перемещается в направлении к приводу. Так как в бремсберговых конвейерах с углом установки более -3 ... -5 ° двигатель работает в генераторном режиме и в точке набегания на привод лента имеет минимальное натяжение, то при дальнейшем снижении этого натяжения может быть исчерпан запас по сцеплению на приводе и начнется полное скольжение ленты, что может привести к аварийной ситуации крем того, натяжение лента может упасть ниже уровня, при котором обеспечивается устойчивое движение без образования недопустимых прогибов между роликоопорами Так как при переходе от устойчивого режима к режиму торможения направление сил сопротивления движению не меняется, то и скорости распространения волн. Прямые волны частично отражаются от границы груженого и порожнего участков лент, коэффициенты отражения и знаки отраженных волн.
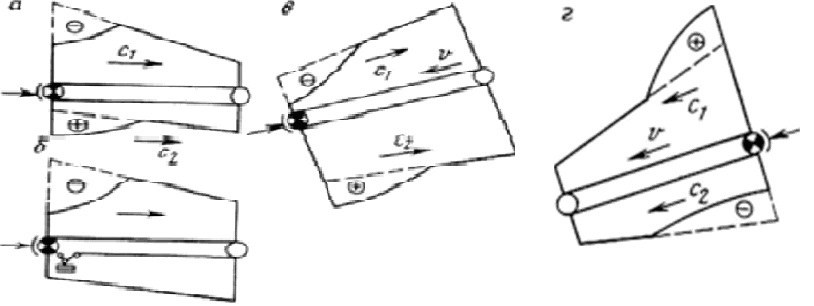
Рис.4.1 - Распространение волн при торможении конвейера: а, б - горизонтального ига уклона, г - бремсбергового
Для схемы с жестким натяжным устройством натяжения в точке набегания имеет минимум в момент времени расчетная формула имеет вид:
 где
где
 - приведенное к ободу барабана тормозное усилие; y - угловой коэффициент механической характеристики тормозного устройства; W - тяговое усилие привода в установившемся режиме (в генераторном режиме - отрицательно)
Максимальное натяжение при торможении груженого бремсберговом конвейера возникает в хвостовой части конвейера через после начала торможения:
- приведенное к ободу барабана тормозное усилие; y - угловой коэффициент механической характеристики тормозного устройства; W - тяговое усилие привода в установившемся режиме (в генераторном режиме - отрицательно)
Максимальное натяжение при торможении груженого бремсберговом конвейера возникает в хвостовой части конвейера через после начала торможения:

где Ko - коэффициент, учитывающий снижение амплитуды прямой волны вследствие внутреннего трения в ленте по мере ее распространения в хвостовой части конвейера. Для схемы с податливым натяжным устройством минимальное натяжение в точке набегания в зависимости от интенсивности волны, отраженной от границы грузовой и порожней ветвей ленты. Для анализа устойчивости движения ленты на роликовом основании в режиме торможения определить динамические натяжения ленты в различных точках по длине става. При движения распространении прямой волны ослабления натяжения вдоль загруженной ветви натяжение в точке, удаленной от привода на расстояние х, начинает падать через час после начала торможения и до момента прихода в точку волны розтягнення.Тому

где
Условие устойчивости соблюдается, если
где Lp - расстояние между роликоопорами на груженой ветви Решение задачи об устойчивости ленты на роликовом ставе течение всего периода торможения требует весьма громоздкого анализа волновых процессов, поэтому эти расчеты целесообразно проводить с помощью вычислительной техники, особенно при сложном профиле трассы конвейера. При установке привода бремсберговом конвейера в зоне максимальных статических натяжений после приложения тормозного усилия по загруженной ветви распространяется волна динамического растяжения. Поэтому такая схема предпочтительнее с точки зрения обеспечения устойчивости загруженной ленты при торможении Кроме того, так как привод установлен в зоне максимальных натяжений, легко обеспечить необходимый запас по сцеплению на приводных барабанах и отсутствие скольжения ленты, когда динамические натяжения вблизи привода достигают экстремальных значений. По этим же причинам иногда в бремсберговых конвейерах применяют схему, когда привод устанавливают в главной части конвейера, а тормозное устройство - на хвостовом барабане. В бремсберговых конвейерах с тормозным устройством, установленным на главной станции конвейера в зоне минимальных статических натяжений, отсутствие проскальзывания ленты можно обеспечить лишь при значительном запасе по сцеплению на тормозном барабане, что приводит к необходимости увеличения натяжения контура ленты в установившемся режиме, папок необходимости применения более прочной ленты.
Выводы
1) Пуск конвейеров из-за больших инерционных масс и статических нагрузок отличается значительной продолжительностью и сопровождается существенным нагревом двигателей. Перегрузка конвейера, пониженное напряжение питания, некоторые виды неисправности в механическом и электрическом оборудовании могут приводить к дополнительному затягиванию процесса пуска и вследствие этого к недопустимому превышению температуры двигателя. Кроме того, перегрузки ленточных конвейеров может привести к пробуксовке тягового элемента на приводном органе При этом закончился процесс пуска двигателя не выводит конвейер на рабочую скорость, а длительное буксования приводит к порче тягового элемента, поэтому во всех случаях длительного пуска конвейера более регламентированного времени привод необходимо отключить . 2) Построена математическая модель, по которой могут быть рассчитаны динамические усилия при пуске конвейера. 3) Построена математическая модель, по которой могут быть рассчитаны динамические усилия при торможении конвейера.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2011 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
1. Бужинский И.А. Определение рациональных пусковых характеристик привода наклонного ленточного конвейера / И.А. Бужинский, Р.А. Кирия// Машины для предприятий горной промышленности. – К., 1986. - с.30-38
2. Кирия Р.В. Влияние типа натяжного устройства и места его установки на динамику пуска ленточного конвейера / Р.В. Кирия, В.Ю. Масютенко, И.А. Бужинский// Сб. науч. тр. Геотехническая механика – Д. -2006. – Выш. №67. – с.73-83.
3. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. – М., 1988. – 256с.
4. Спиваковский А.О. Теория ленточных конвейеров/ А.О. Спиваковский, В.Г. Дмитриев. – М., 1982. – 192с.
5. Штокман И.Г. Динамика тяговых цепей рудничных конвейеров. – М., 1959. – 304с.
6.Галкин В. И. , Дмитриев В. Г. , Дьяченко В. П. , Запенин И. В. , Шешко Е. Е.Современная теория ленточных конвейеров горных предприятий. Учебное пособие; М.: Горная книга, 2011. - 544 с.