





Computer Sciences and Technologies Faculty
Computer engineering
Specialty: "Computer systems and networks"
![Abstract [selected]](../images/en_x_19.jpg)
Theme of master's work:
"Synthesis and optimization of analog-digital systems models parameters"
Scientific advisor: Associate Professor,Ph.D Lapko V.V.

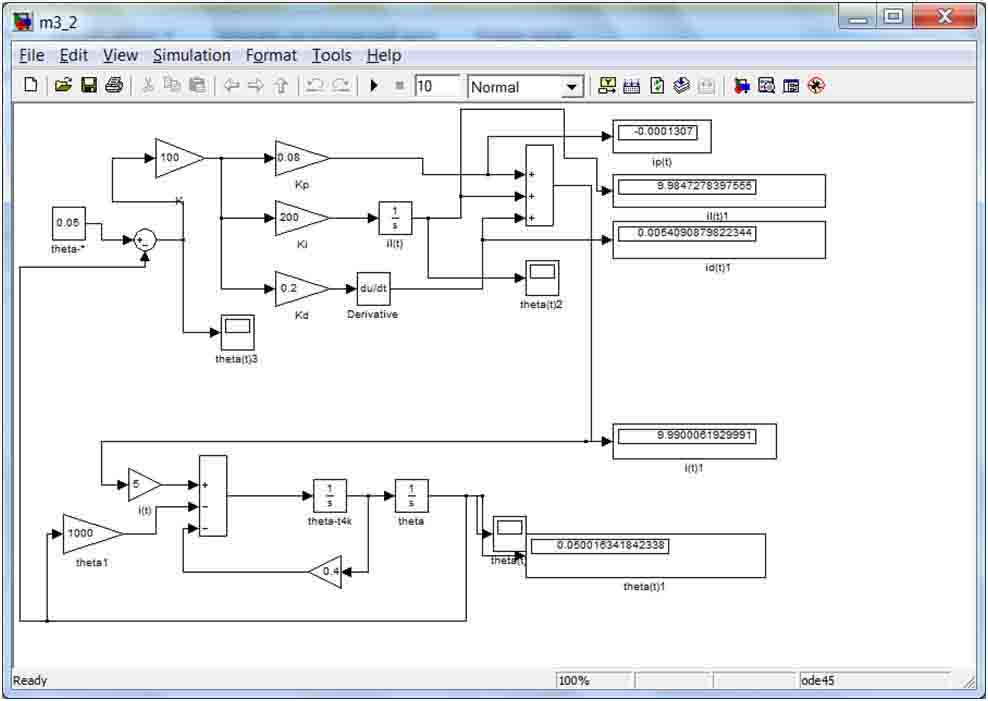
Figure 2.5 – Mathematical model for continuous control.

Figure 2.6 – Transition process of installing a magnetic read/write head of hard disk without compensating for the continuous controller.
Animation consists of 6 frames with a delay of 0.1 second; the delay before repeat composes 0.6 second; the number of cycles of reproduction is limited to the 7 times; the volume of the animation – 135 kb.


