





Computer Sciences and Technologies Faculty
Computer engineering
Specialty: "Computer systems and networks"
![Abstract [selected]](../images/en_x_19.jpg)
Theme of master's work:
"Synthesis and optimization of analog-digital systems models parameters"
Scientific advisor: Associate Professor,Ph.D Lapko V.V.

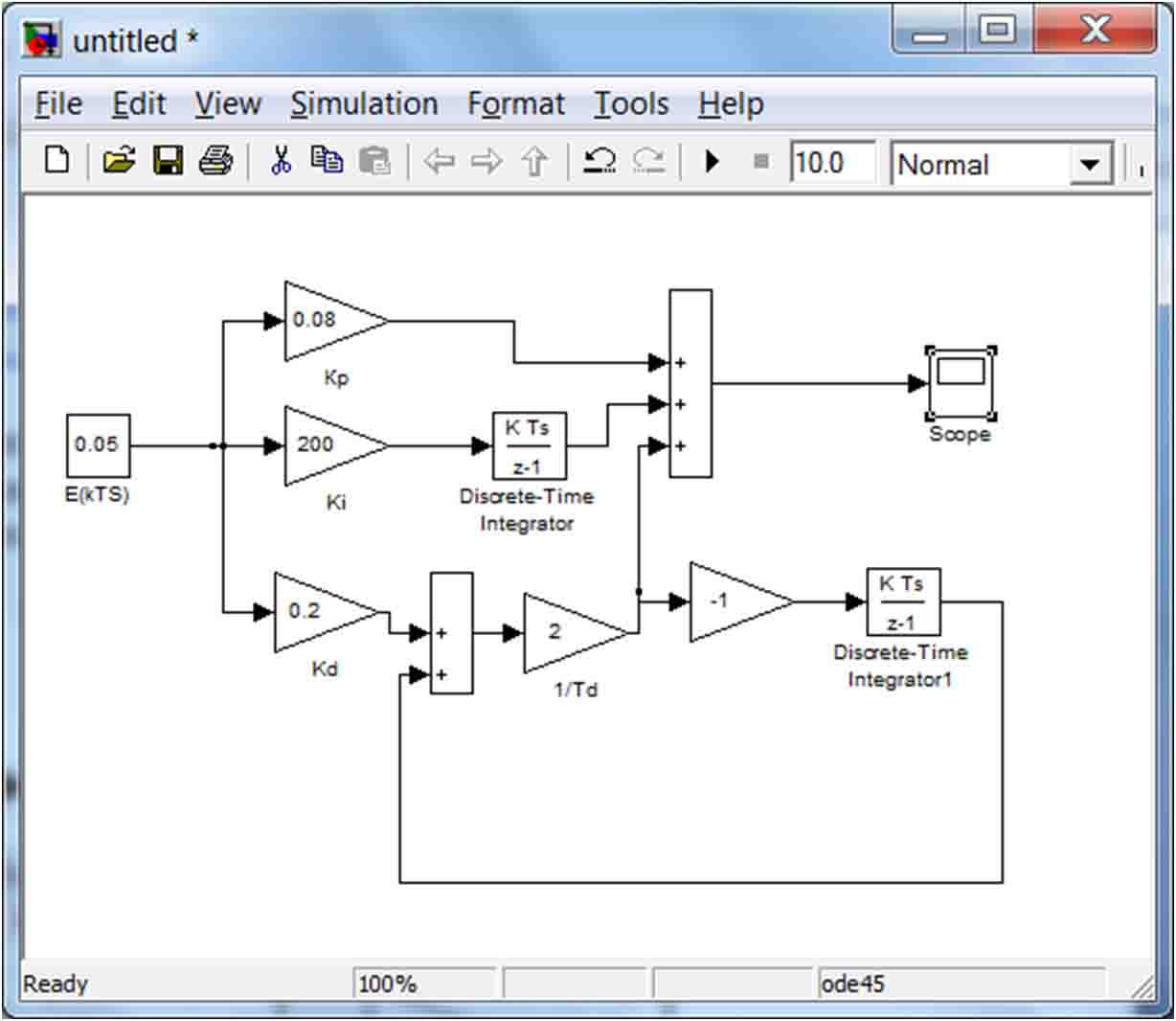
Figure 3.2 – Digital model control the rotary drive mechanism:
DC – the digital controller;
Ts – sampling step in the digital control system.
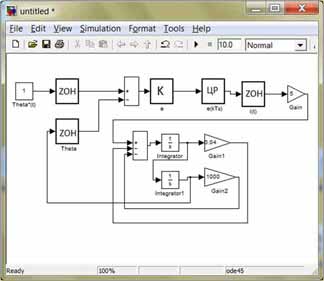
Figure 3.3 – Mathematical model of a hybrid control system
DC – the digital controller;
Ts – sampling step in the digital control system.
Figure 3.3 – Mathematical model of a hybrid control system


